Изобретение относится к управляемым электроприводам.
Известны устройства управления бесконтактным двигателем постоянного тока с однополупериодиым коммутатором, содержащие широтно-импульсный регулятор скорости вращения, к входу которого подключен источник управляющего сигнала, а к выходу - релейный каиал реверса, и широтно-импульсный модулятор в цепи управления коммутатора.
Регулировочные характеристики электродвигателей с такими устройствами управления имеют линейный характер. Недостаток известных устройств заключается в низких энергетических показателях.
Целью изобретения является устранение указанного недостатка.
Поставленная цель достигается объединением входов широтно-импульсных регулятора и модулятора.
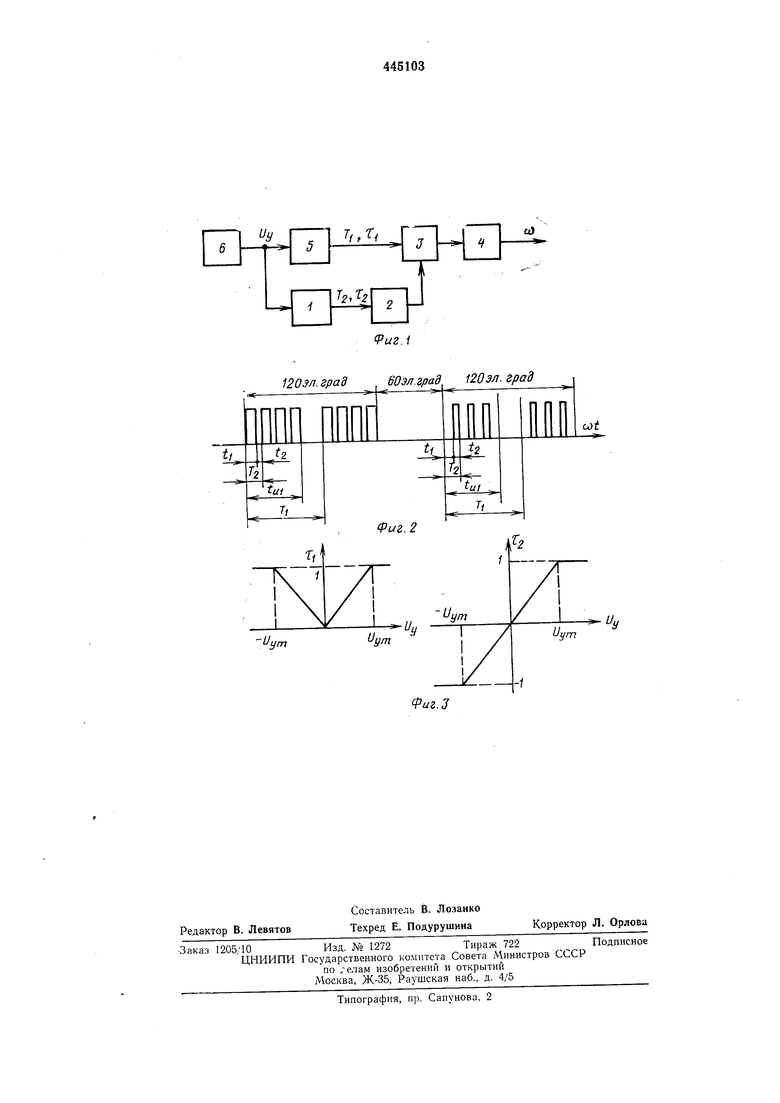
На фиг. 1 показана блок-схема устройства управления бесконтактным двигателем постоянного тока; на фиг. 2 - эпюры напряжения на одной из секций трехфазного двигателя; на фиг. 3 - зависимости относительных длительностей подключений секции к источнику питания.
На чертежах и в тексте описания приняты следующие обозначения:
t
Ti, tui, TI период повторения
имTI
пульсов щиротно-импульсного модулятора в управляющей цепи коммутатора, длительность импульса включения двигателя за период и его относительная величина соответственно;
7 / 7 - -- .
- период повторения
л 1J .tji -
l
импульсов щиротно-импульсного регулятора в канале реверса, длительности включения канала реверса в прямом и обратном направлении и их относительная величина соответственно;
Uy, W - управляющее напряжение и скорость вращения двигателя.
Устройство управления содержит щиротноимпульсного регулятор 1, к выходу которого подключен релейный канал реверса 2, соединенный с полупроводниковым коммутатором 3 двигателя 4. В течение интервала i двигатель развивает вращающий момент одного знака, а в течение интервала 4 противоположного.
Устройство снабжено щиротно-импульсным модулятором 5, стоящим в управляющей цепи коммутатора 3. Входы щиротно-импульсных регулятора 1 и модулятора 5 объединены и подключены к источнику управляющего сигнала 6.
Выходные импульсы широтно-импульсного модулятора 5 с периодом Ti и относительной длительностью TI на время i,i подключают двигатель к источнику питания. Форма напряжения на одной из секций двигателя при некотором промежуточном значении сигнала управления и показана на фиг. 2.
Импульсы напряжения на секциях двигателя, создающие положительный и отрицательный вращающий момент с относительной длительностью Т2 претерпевают дополнительную широтно-импульсную модуляцию от действия широтно-импульсного модулятора 5 в управляющей цепи коммутатора 3. В результате этой модуляции уменьшается эквивалентное среднее питающее напряжение как на интервалах разгона двигателя /ь так и на интервалах торможения /2. Формы напряжения на остальных секциях двигателя аналогичны приведенной на фиг. 2, но сдвинуты на угол, величина которого зависит от числа секций и полюсов двигателя.
Наличие подтормаживающих импульсов обеспечивает линейность регулировочной скоростной характеристики двигателя, а за счет широтно-импульсной модуляции в управляющей цепи коммутатора улучшаются его энергетические показатели.
Устройство управления рассчитывается так, чтобы при отсутствии управляющего сигнала относительные длительности TI и Т2 были равны нулю, т. е. длительность импульсов, вырабатываемых модулятором 5, равнялась нулю, а время включения канала реверса в прямом и обратном направлении было одинаково. Поскольку силовые ключи при этом закрыты, двигатель не потребляет энергии, чем
обеспечиваются высокие энергетические показатели. Максимальные значения TI и Т2 достигают при 17у /7ут, а двигатель работает при этом на своей предельной механической характеристике при прямом или обратном включении. Характер зависимостей Ti(/7y) и Т2(у) может быть различным. На фиг. 3 в качестве примера приведены линейные зависимости, при которых моментная нусковая характеристика двигателя имеет вид квадратичной нараболы, поскольку среднее напряжение на двигателе в этом случае пропорционально квадрату управляющего напряжения.
Возможно построение предлагаемого устройства управления при , т.е. когда период повторения выходного сигнала широтноимпульсного регулятора 1 в канале реверса больше периода повторения выходного сигнала широтно-импульсного модулятора 5 в
0 управляюшей цепи коммутатора. При этом изменяется форма напряжений на секциях двигателя, но при сохранении зависимостей фиг. 3 свойства устройства управления сохраняются.
Предмет изобретения
Устройство для управления бесконтактным двигателем постоянного тока, с однополупе0 риодным коммутатором, содержащее широтно-импульсный регулятор скорости вращения, к входу которого нодключен источник управляющего сигнала, а к выходу - релейный канал реверса, и широтно-импульсный модулятор в цепи управления коммутатора, отличающееся тем, что, с целью улучшения энергетических показателей, входы широтноимпульсных модулятора и регулятора скорости вращения объединены.
Uu
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления бесконтактным электродвигателем постоянного тока | 1981 |
|
SU1020951A1 |
| Вентильный двигатель | 1983 |
|
SU1130970A1 |
| Устройство для управления автономнымиНВЕРТОРОМ | 1979 |
|
SU830631A1 |
| Вентильный электродвигатель | 1976 |
|
SU647806A1 |
| Цифровой электропривод постоянного тока | 1982 |
|
SU1117809A1 |
| БЕСКОНТАКТНЫЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1973 |
|
SU383191A1 |
| Регулируемый ветнильный электродвигатель | 1977 |
|
SU684684A1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Дискретный преобразователь аналоговых сигналов | 1974 |
|
SU658731A1 |
| Устройство для регулирования уровня воды в канале | 1982 |
|
SU1084758A2 |