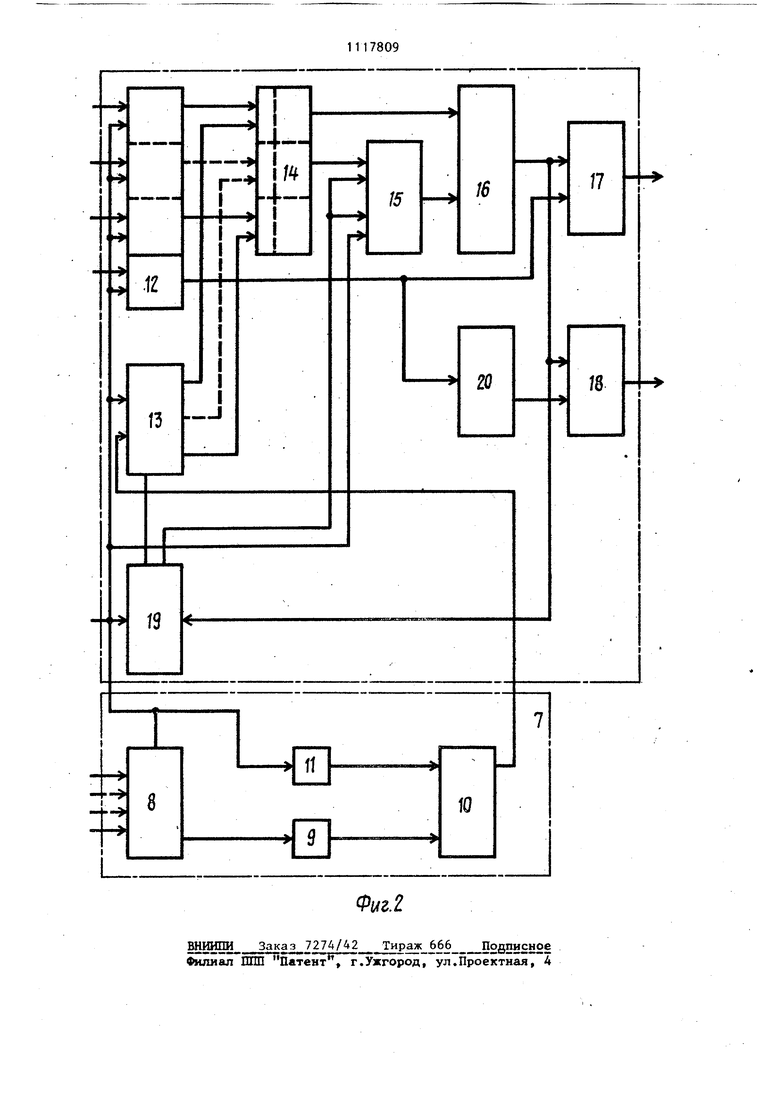
f 11 Изобретение относится к электро-, технике и может быть использовано в системах числового программного управления электроприводами постоянного тока, в цифровых высокоточных системах стабилизации скорости. Известен цифровой электропривод постоянного тока, содержащий электро двигатель, подключенньй к транзистор ному преобразователю и снабженный импульсным датчиком угла поворота вала. Требуемая частота вращения электродвигателя задается здесь в цифровом виде с помощью микропроцессора. При высокой частоте вращения регулирование осуществляется путем подсчета числа импульсов датчика угл поворота вала за заданное время измерения, при низкой - определением длительности периода. Микропроцессор используется для расчета фактических значений определяемых параметров, для вьдачи алгоритмов управления и формирования сигналов, управления lj Недостатком данного электропривода является низкая точность регулиро вания частоты вращения электродвигателя. Наиболее близким к изобретению по технической сущности является циф ровой электропривод постоянного тока содержащий электродвигатель с импуль сным датчиком и измерителем частоты вращения, подключенный к выходу широтно-импульсного преобразователя, входом соединенного с широтно-ймпуль сным модулятором, подключенным к выходам m старших разрядов цифровог регулятора частоты, первый вход кото рого соединен с выходом блока задания, а второй - с выходом измерителя частоты вращения 2j . Недостаток известного электропривода также заключается в низкой точности регулирования частоты вращения Цифровой широтно-импульсный модулятор с двусторонней модуляцией имеет восьмнразрядньй вход, определя ющий длину выходного слова цифрового регулятора частоты, а также значение шага квантования относитель но длины импульса 1/256. Наличие квантования с указанной разрядностью выходного слова цифрового регулятора частоты неизбежно приводит к автоколебаниям с амплитудой не менее одной дискреты, что составляет 0,4% от всего диапазона регулирования напряжения на якоре электродвигателя. 2 Кроме того, разрядность выходного слова в известном электроприводе жестко связана с динамическими свой- ствами широтно-импульсного преобразователя (ШИП) и цифрового регулятора частоты. Увеличение же разрядности, с одной сторонБ, ограничено быстродействием микросхем, с другой - ростом тепловык потерь при переключении силовых ключей в ШИПе. Целью изобретения является повышение точности регулирования частоты вращения. Поставленная цель достигается тем, что в цифровой электропривод постоянного тока, содержащий электродвигатель с импульсным датчиком и измерителем частоты вращения, подключенный к выходу широтно-импульсного преобразователя, входом соединенного с широтно-импульсным модулятором, подключенным к выходам m старщйх разрядов цифрового регуля- тора частоты, первый вход которо- , го соединен с выходом блока зада- . ния, а второй - с выходом измерителя частоты вращения, введен блок накопления младших разрядов, входы которого подключены к выходам п младших разрядов цифрового регулятора частоты, а выход - к другому входу широтно-импульсного модулятора. Влок накопления младших разрядов содержит последовательно соединенные сумматор, п входов которого образуют входы блока накопления младших разрядов, первый элемент задержки и триггер, вход KOTopioro образует выход блока накопления младших разрядов, а к входу сброса триггера подключен второй элемент задержки. На фиг. 1 изображена блок-схема цифрового электропривода постоянного тока; на фиг. 2 - структурная схема блока накопления младших разрядов и широтно-импульсного модулятора. Цифровой электропривод постоянного тока содержит электродвигатель 1 с импульсным датчиком 2 и измерителем 3 частоты вращения, подключенный к выходу широтно-импульсного преобразователя 4, входом соединенного с широтно-импульсным модулятором 5, под- ключенным к выходам га старших разрядов цифрового регулятора 6 частоты, первый вход которого соединен с блоком задания (не показан), а второй с выходом измерителя 3 частоты вращения . Блок 7 накопления младших разрядов входами подключен к выходам п младших разрядов цифрового регулятора 6 частоты, а выходом - к другому входу широтно-импульсного модулятора 5. Блок 7 накопления мпадпих разрядов содержит последовательно соединенные сумматор 8, п входов которого образуют входы блока 7 накопления младших разрядов, первый элемент 9 задержки и триггер 10, выход которого образует выход блока 7 накопления младших разрядов, а к входу сброса триггера 10 подключен второй элемент Т1 задержки, связанный с шиной Пуск широтно-импульсного модулятора, которьй может быть выполнен, например, на регистре 12, входы которого образуют m входов широтноимпульсного модулятора 5, подключенных в месте со счетчиком 13 к шине Пуск, при этом выходы регистра 12 .и счетчика 13 соединены с блоком 14 сравнения, связанным с логическим элементом 2И-ИЛИ 15 и с D-триггером 16, подключенным к двум логическим элементам И 17 и 18, образующим выход широтно-импульсного модулятора 5, и к генератору 19. Другие входы логических элементов И 17 и 18 связа ны соответственно с регистром 12 неп средственно и через логический элемент НЕ 20. . Цифровой электропривод постоянного тока работает следующим образом. На вход цифрового регулятора .6 частоты (фиг. 1) поступает информация о коде задания частоты вращения и реальной (фактической) частоте вращения электродвигателя 1. Цифровой регулятор 6 частоты, обработав полученную информацию, вьщает управ ляющее воздействие в виде кода разрядностью т+п разрядов, причем m старших разрядов подаются на входы широтно-импульсного модулятора 5 (ш-й разряд вьщеляется под знаковый а п младших - на входы блока 7 нако ления младших разрядов. Информация с блока 7 накопления младших разрядов поступает на вход широтно-импул сного модулятора 5 через К-периодов (циклов), причем число К определяет ся из выражения К-М 2, где М число, заданное на входах блока 7 накопления младших разрядов, an-.
число его разрядов (входов). Это происходит следующим образом. На кодовые входы регистра 12 (фиг. 2) и сумматора 8 подается кодовая информация в виде параллельного кода разрядности т+п разрядов, причем п разрядов (младшие) - на входы сумматоj)a 8, а m разрядов (старщне) - на I входы регистра 12,т-й разряд которого ьщеляется под знаковый.Затем подается команда Пуск, по которой происходит запись старшей части кода в регистр 12, прибавление младшей части к содержимому сумматора 8, установка счетчика 13 в состояние О (триггер 10 памяти досчета находится в состоянии О) и с помощью логического элемента 2И-ИШ 15 (на входы которого поступает команда Пуск и строб с второго выхода генератора 19) формируется импульс записи по входу С D-триггера 16. Команда Пуск поступает от цифрового регулятора 6, роль которого вьшолняет микро-ЭВМ. В момент записи кодовой информации в регистр 12 и поступления счетных импульсов с первого выхода генератора 19 на первый вход счетчика 13 на первом выходе блока 14 сравнения вырабатывается сигнал (как несравнение кодов, поступающих с регистра 12 и счетчика 13), котерьй, например, в виде 1 высоким уровнем поступает на вход D D-триггера 16. Одновременно с этим вырабатывается импульс записи с выхода, логического элемента 2И-ИЛИ 15 по команде Пуск и стробу, поступающему с второго выхода генератора 19. Таким образом, в D-триггер 16 записывается информация о начале временного интервала. Эта информация (в примере 1) с выхода D-триггёра 16 поступает на вторые входы логических элементов И 17 и 18. В зависимости от состояния знакового разряда регистра 12 срабатывает логический элемент . И 17 (или 18), и на его выходе появляется сигнал. В момент сравнения кода, записанного в регистре 12 с кодом, поступающим со счетчика 13, блок 14 сравнения вырабатывает на первом выходе сигнал (для данного случая О), который поступает на вход D D-триггера 16, а на втором выходе - сигнал, который, проходя через логический 51 элемент 2И-ИЛИ 15, одновременно со стробом, поступающим с второго выхода генератора 19, формирует им-, пульс записи для входа С D-триггера 16. Таким образом, в D-триггер 16 записьюается информация о конце временного интервала. Эта информация как запрет (в примере О) с выхода D-триггера 16 поступает на вторые входы логических элементов И 17, и 1 и снимает сигнал на их выходах. Таким образом, на выходе формируется временной интервал Т, соответствующий коду, записанному в регистре 12 (старшей части входного кода) и определяемый вьгражением где Т - период следования импульсов генератора 19; N - число, соответствующее стар шим m разрядам входного кода широтно-импульсного МО-. дулятора 5. Поступление следующей команды Пуск (следует с постоянной такто-, вой частотой цифрового регулятора 6 частоты) вызывает повторение цикла формирования временного интервала Т- . При этом содержимое сумматора 8 накапливается. Через К периодов (циклов) модуляции на выходе сумматора 8 появляется сигнал, который через промежуток времени , опреде ляемый элементов 9 задержки, устанав ливает триггер 10 памяти досчета в состояние 1. Поступление следующей команды Пуск устанавливает счетчик 13 в состояние 1 (все разряды счет чика устанавливаются в состояние Через интервал времени Un (меньший Lj), определяемый элементом 11 задер ки, триггер 10 памяти Досчета сбрасывается в исходное состояние О и подготавливается к запоминанию следу щего сигнала переполнения сумматора 8. , Таким образом, для заполнения сче чика 13 до совпадения с кодом, записанным в регистре 12 (соответствующим m старшим разрядам цифрового регулятора 6 частоты), потребуется дополнительный период частоты генератора 19, и на выходе широтно-импульсного модулятора 5 формируется временной интервал Т,, Таким образом, на вход широтноимпульсного преобразователя 4, являю 9 щегося усилителем мощности, поступает широтно-модулированный сигнал широтно-имйульсного модулятора 5 с длительностью импульсов Tj, опреде-. ляемой старшей частью входного кода и состоянием триггера 10 памяти досчета. ПриНулевом состоянии триггера 10 памяти досчета Т Т N. При единичном состоянии триггера 10 памяти досчета возникает один импульс длительности: (N+1)TjjN-bT(,T,-t-To, где Тд - период следования импульсов генератора 19; N - число, записанное в старшие разряды входного кода. Таким образом, сигнал с широтноимпульсного модулятора 5 можно представить в виде суммы двух сигналов с импульсами длительности Т, следующих с частотой 1 1 const и одиночных импульсов длительностью Т с переменной частотой, зависящей записанного в мпадшие разот числа, ряды f - г - 2М т С выхода широтно-импульсного модулятора 5 сигнал поступает на широтноимпульсный преобразователь 4, напряжение которого управляет электродвигателем 1. Среднее значение напряжения на якоре двигателя 1 является суммой двух напряжений со средними значениями Т„. N и„.. T.N Ua M 2. Полное вьфажение для среднего значения напряжения на двигателе имеет вид ,U, 2-SN+| n|;;, :() Таким образом, основная составлящая напряжения U образуется сигналом высокой частоты щиротно-импульснор модулятора 5, обеспечивающей допус/ 1
тимые колебания частоты вращения двигателя 1, по которым и выбирается разрядность старших т.
Точная подрегулировка частоты вращения двигателя 1 производится напряжением Uj, среднее значение которого формируется короткими импульсами с длительностью импУльсов, равной периоду следования импульсов вькокой частоты генератора 19, следующих с более низкой частотой по сравнению с основным сигналом.
178098
Информация о частоте вра щения двигателя 1 фиксируется импульсным датчиком 2 и обрабатывается из epитeлeм 3 частоты вращения, с выхода которо5 го информация поступает на цифровой регулятор 6 частоты.
Таким образом, введение блока накопления младших разрядов позволяет повысить точность работы цифрового to электропривода постоянного тока
без существенного увеличения пульса-ций мгновенной частоты вращения двигателя .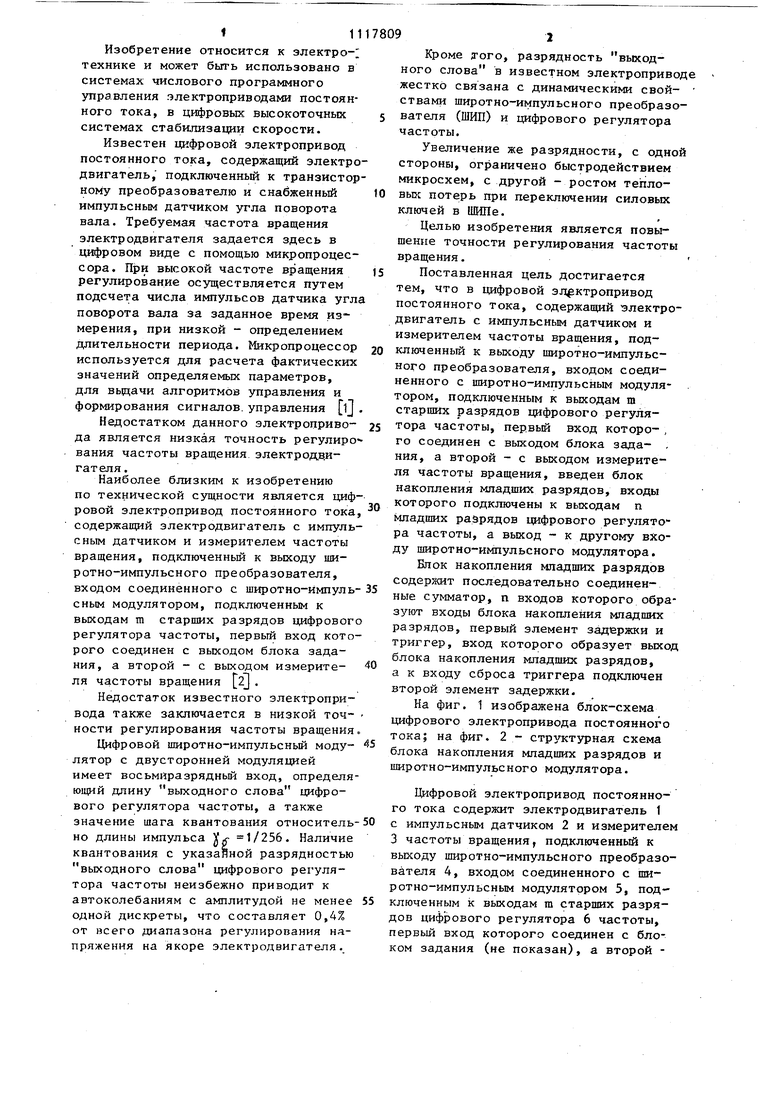
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой электропривод постоянного тока | 1989 |
|
SU1644347A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВОЙНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2037263C1 |
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| Цифровой электропривод постоянного тока | 1986 |
|
SU1399880A1 |
| УСТРОЙСТВО ТЕРМОКОМПЕНСАЦИИ КВАРЦЕВОГО ГЕНЕРАТОРА | 2011 |
|
RU2481695C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПУСКОМ И ОСТАНОВОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2011 |
|
RU2454784C1 |
| Устройство для пуска асинхронного электродвигателя | 1981 |
|
SU989714A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Цифровой электропривод | 1986 |
|
SU1390759A1 |
1. ЦИФРОВОЙ ЭЛЕКТРОПРИВОД .ПОСТОЯННОГО ТОКА, содержащий электродвигатель с импульсным датчиком и измерителем частоты вращения, подключенный к выходу широтно-импульсного преобразователя, входом соединенного с широтно-импульсным модулятором, подключенным к выходам m старших разрядов цифрового регулятора частоты, первый вход которого соеди нен с выходом блока задания, а второй - с выходом измерителя частоты вращения, отличающийся тем, что, с целью повышения точности регулирования частоты вращения, в него введен блок накопления младп их разрядов, входы которого подключены к выходам п младших разрядов цифрового регулятора частоты, а выход к другому входу широтно-импульсного модулятора. 2. Электропривод по п.1, о т л и чающийс.я тем, что блок накопления младших разрядов содержит (Л последовательно соединенные сумматор, п входов которого образуют входы блока накопления младших разрядов, первый элемент задержки и триггер, выход которого образует выход блока накопления младших разрядов, а к входу сброса триггера подключен второй элемент задержки.
т.
N3
N.
О.С.
t
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент ФРГ № 3110937, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Фахридцинов Х.Т., Смирнов А.И | |||
| Цифровая система управления двигателя постоянного тока с широтно-импульсным преобразователем, ЛЦ НТП, Л., 1981, с | |||
| Фальцовая черепица | 0 |
|
SU75A1 |
