1
Изобретение относится к устройству управления регулирующими органами автоматаческого регулятора.
Р1звестна электрогидравлическая следящая ci-iCTC.via, содержащая силовой гидроцилиндр, охваченный отр.ицательной обратной связью, и электромеханический преобразователь, на валу которого установлены заслонка и струйная трубка, против которой размещена плата с отзерстнями.
Известная электрогидравлическая следящая система не позволяет отслеживать скорость леремещеняя регулирующего ограна автоматического регулятора при наличии кинематической связи конечной жесткости между ним и электрогидравлической следящей системой.
Этот недостаток приводит к существенной погрещности характеристик систе,мы при диъамлческом режиме.
Предложенная электрогадравлическая еледящая система отличается тем, что, с целью умепьщения погрещности в характеристиках системы при динамическом режиме, в ней цепь обратной связи выполнена в виде дополпитель1:ого ЦИлипдра с плунжером, связанным через пружину с выходным вало,м силового гидооцил пндра, двух сопел, размещенных против заслонки электромеханического преобразователя и подключенных к внутренним полостям дополйительного цилиндра, торцовые полости которого соединены с отверстия.мл платы и полостями силового гидроцилиндра.
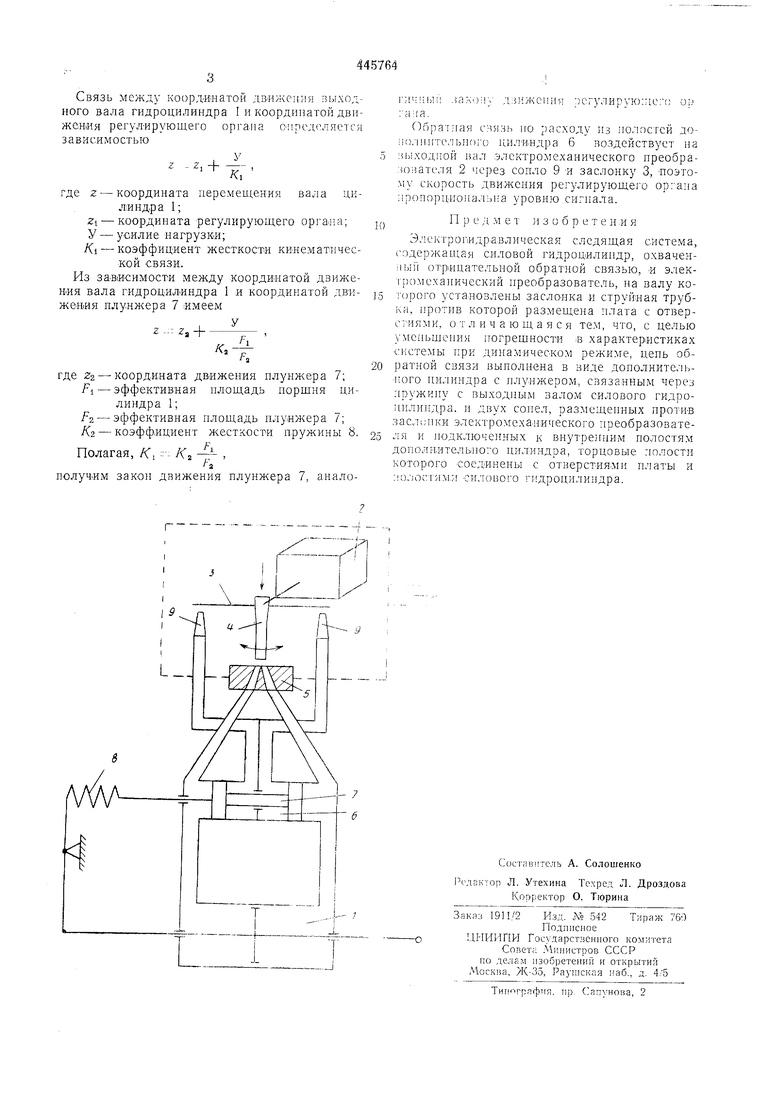
lia чертеже приведена принципиальная схема электрогидравличеекой следящей системы.
Система содержит силовой гидроцилиндр 1, электромеханический преобразователь 2, на валу которого установлены заслонка 3 « струйная трубка 4, против которой размещена плата с отверстиями 5. Устройство отрицательной обратной связи выполнено Б виде дополнительного цилиндра 6 с плунжером 7, связанным через пружину 8 с валом гидроцил-индра i, и двух сопел 9, размещенных против заслонки 3 преобразователя 2 и подключенных к внутренним нолостям цилиндра 6, торцовые полости которого соедипены с отверстиями платы 5 и полостями гидроцилиндра 1.
Электрогидравлическая следящая система работает следующим образом.
При отсутствии сигнала на входе преобразователя 2 -струйная трубка 4 находится в нейтральном положении, и выходной вал гидроцилиндра 1 не движется. При подаче сигнала па вход преобразователя 2 электрогидравлическая следящая система приводит в движение регулирующий орган автоматического регулятора, связанный с ней через кинематическую передачу, со скоростью, пропорциональной уровню сигнала.
Пояспи.м это математически.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU395623A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1996 |
|
RU2116524C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1997 |
|
RU2131064C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 2015 |
|
RU2599098C1 |
| Цифровой электрогидравлический привод | 1978 |
|
SU792002A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029890C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2153104C1 |
