1
Изобретение относится к сель скому хозяйству и предназначено для использования в автоматических прореживателях растений, например, всходов сахарной свеклы.
Известен автомат управления рабочими органами прореживателя всходов сахарной свеклы, содержащий счетчик импульсов пути, управляемый датчиком растений, и корректируадее устройство, которое измэряет величину отклонения растения от заданного интервала и автоматически делит ее между последующими тремя-четырьмя интервалами, регулируя, таким образом, заданный интервал.
Такой автомат имеет недостаточную э(|)(1)ективность прореживания при резких, колебаниях густоты растений Это объясняется тем, что коррекция размера заданного интервала пшизводится за измеренным интервалом, где неизвестно фактическое расстояние меаду растениями и неизл
, вестно фактическое расстояние межI ду растенЕЯМя и неизвестно фактическое отклонение местонахождения растений последующих трех-четырех интервалов от вновь заданного Ткорректированного).
Цель изобретения - повышение )фективности прореживания растений.
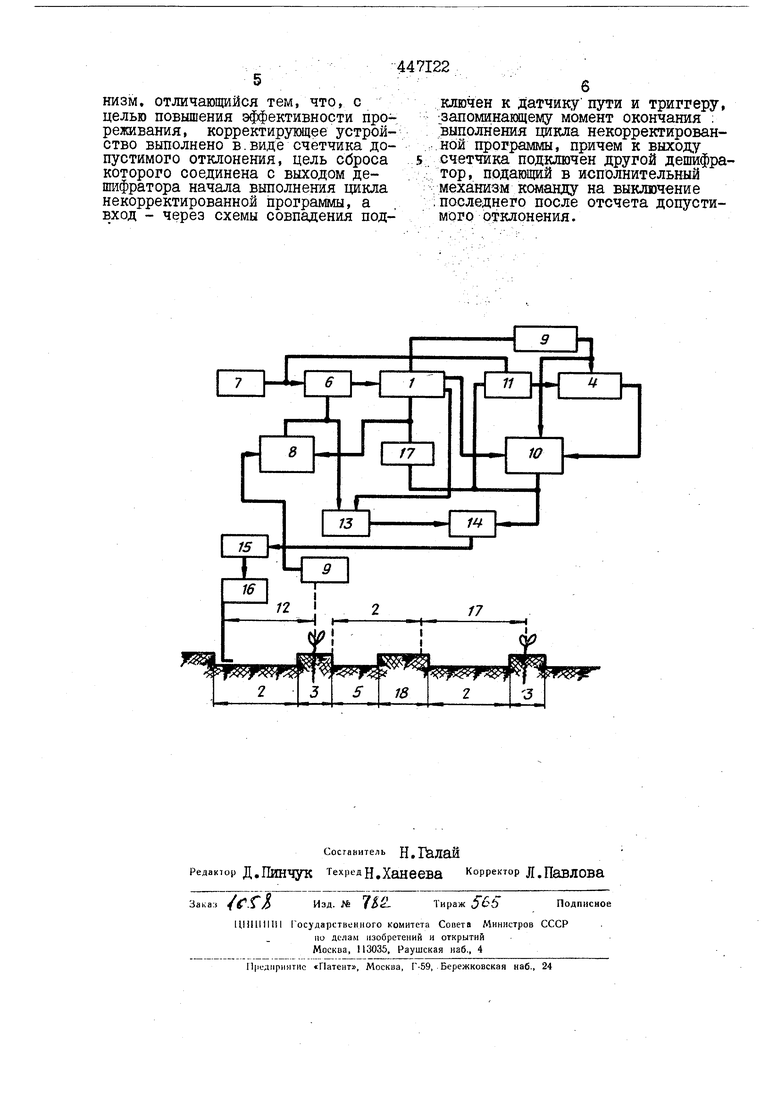
Поставленная цель достигается тем, что корректирующее устройство выполнено в виде счетчика допустимого отклонения, цепь сброса кото. рого соединена с выходом дешифратора начала выполнения цикла некорректированной программы, а вход через схемы совпадения подключен к датчику пути и тригеру, запоминающему момент окончания выполнения цикла некорректированной программы, причем к выходу счетчика подключен другой дешифратор, подающий в исполнительным механизм команду на выключение последнего после отсчета допустимого отклонения. На чертеже изображена функционально-логическая схема автомата управления. Од содержит счетчик I корректированной программы, считывающим импульсы пути выреза 2 и гнезда 3, а также счетчик 4 допустимого отклонения, считывающий импульсы пути выреза 5. Схема И.6 соединена по входам с датчиком импульсов.пути 7 и триггером управления 8, а по выходу - со счетчиком I. Триггер 8 по входу соединен с датчиком 7 растений. Выход дешифратора начала некорректированнои программы, задаваемой счетчиком I, соединен с датчиком 9, устанавливающей триггер 10 и счетчик 4 в нуль после начала работы счетчика I, схема совпадения II по входу подключена к датчику 7 и триггеру Ю, запоминающему момент окончания выполнения цикла некорректированной программы, а по выходу к счетчику 4. Она служит для подачи импульсов пути на вход счетчика 4 после сброса счетчика I и установки в нуль триггера 8. Выход счетчика I, дешифрирующий конец выреза 12 и выход триггера 8 через схему совпадения 13 подключен к схеме ИЛРГ 14. Второй выход схемы 14 соединен с триггером 10, а выход - с формирователем команды включения рабочего органа Д5. С выхода формирователя команда подается на исполнительный механизм 16. К счетчику 4 подключен дешифратор допустимого отклонения, который посредством триггера 10 и схемы 14 подает в исполнительный механизм команду навключение рабочего органа после отсчета, допустимого отклонения Датчик растений конструктивно устанавливают от рабочего органа на расстоянии, равном величине выреза 2 плюс половина размера гнезда 3. В исходном положении импульсы с датчика пути не попадают на вход счетчиков. При обнаружении растения импульс с датчика растений производит установку триггера 8, выход которого разрешает прохождение импульсов пути на вход счетчика I и одновременно через схемы 13,14 разрешает формирование команды, по которой исполнительный механизм включает рабочий орган для осуществления выреза 12. Одновременно с поступлением первого импульсного пути на вход счетчика I через схему устанавливается в нуль счетчик и триггер 10 2 После отсчета пути, соответствующего вырезу 2, выход счетчика I через схему 13 запрещает формирование команды, и рабочий орган отключается. После подсчета числа импульсов пути соответствзпощ11х ширине гнезда 3, счетчик I перебрасывает триггер 10, который через схему 14 разрешает формирование команды на включение рабочего органа для формирования выреза 5, через схему совпадения 11 разрешает прохождение импульсов пути на счетчик 4 и с помощью устройства сброса 17 возращает счетчик I и триггер 8 в исходное состояние. Счетчик I и триггер 8 не работают, однако, после этого момента они готовы к приеглу информации от датчика растений. Счетчик I производит подсчет импульсов пути выреза о, затем производится сброс триггера 10 и прекращение выходной команды. После этого участок зоны 18 рядка остается нетронуты1л до встречи датчика 9 с бл гаайшим растением, Автомат не имеет информации о растениях зоны, которая находится сразу за обнаруженным растением, которое оставлено. Поэтому величина зоны 18 равна расстоянию от конца выреза 5 до блтшайшего растения по ходу движения агрегата за вычетом величины допустимого отклонения, которым является размер выреза. Таким образом, если эта разница будет существенной и в неконтролируемой зоне 18 окажется растение, то оно будет сохранено и, следовательно, будет обеспечена требуемая густота растений. разница окажется отрицательной по знаку, то счетчик 4 не закончит формирование выреза 5, По сигналу датчика растений запустится триггер-8, включится счетчик I, а счетчик 4 и триггер 10 сигналом с датчиком 9 возвратятся в исходное положение. Размер допустимого отклонения устанавливается исходя из требований к равномерности густоты растений. ПРЕЩИ ИЗОБРЕТЕНИЯ Автомат управления рабочими органами прореживателя растений, содержащий счетчик импульсов пути, датчик растений, корректирующее устройство и исполнительный механизм, отличающийся тем/что, с целью повышения эффективности прорелжвания, корректирующее устройство выполнено в.виде счетчика допустимого отклонения, цель сброса которого соединена с выходом дешифратора начала выполнения цикла некорректированной программы, а вход - через схемы совпадения подключен к датчику пути и триггеру, запоминащему момент окончания : выполнения цикла некорректирован,нЬй программы, причем к выходу счетчика подключен другой дешифратор, подающий в исполнительный механизм команду на выключение
:последнего после отсчета допустимого отклонения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления автоматическимпРОРЕжиВАТЕлЕМ КульТуРНыХ РАСТЕНий | 1979 |
|
SU843794A1 |
| Автоматический прореживатель пропашных культур | 1981 |
|
SU1020014A1 |
| Система абтоматического управления прореживателем растений | 1984 |
|
SU1159495A1 |
| Устройство программного управления краскораспылителями маркировочной машины | 1980 |
|
SU905350A1 |
| АВТОМАТИЧЕСКИЙ ПРОРЕЖИВАТЕЛЬ РАСТЕНИЙ | 1971 |
|
SU292607A1 |
| Устройство для контроля проскальзывания и отклонения скорости гибкой тяги | 1989 |
|
SU1791839A1 |
| Система управления гидрофицированной установкой | 1980 |
|
SU1143837A1 |
| Программный автомат для ткацких станков | 1982 |
|
SU1308984A1 |
| Устройство для программного управления | 1987 |
|
SU1596307A1 |
| Швейная машина с программным управлением | 1986 |
|
SU1641913A1 |
17
