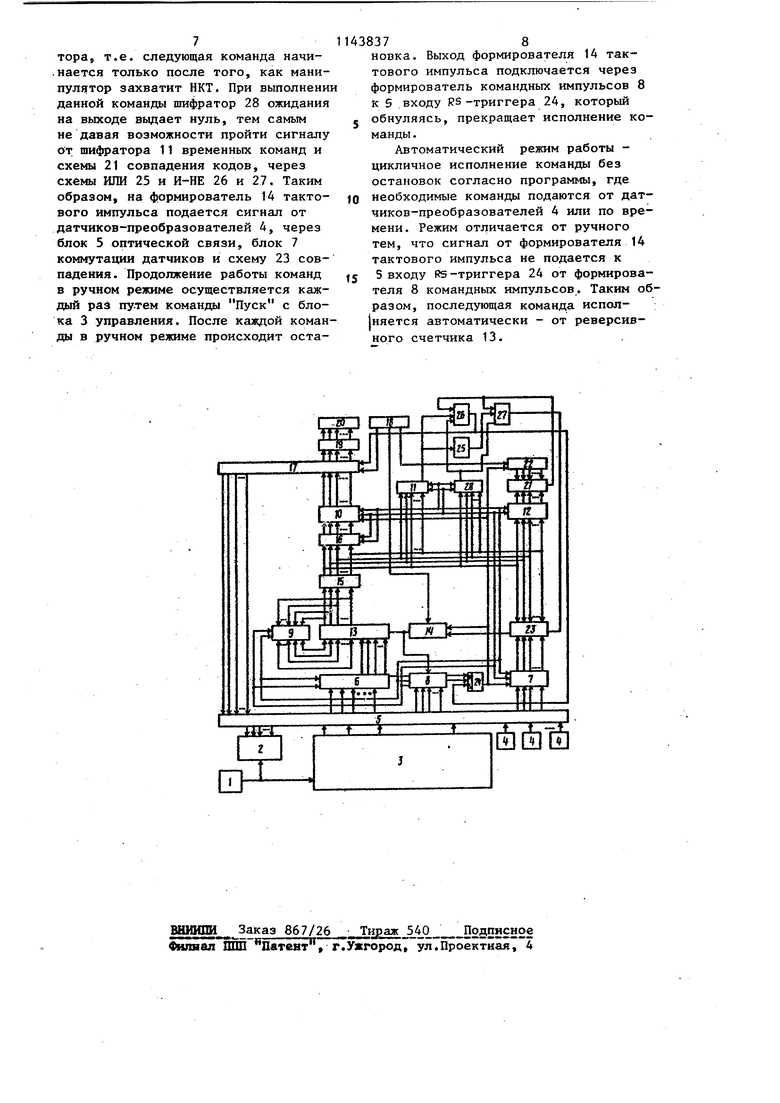
Изобретение относится к телемеханике нефтяного горного машиностроения, а именно к системам управления гидрофицированными установками для бурения и ремонта нефтяных . Известно устройство программного управления буровой установки, содержащее блок автоматического управ. ления циклом бурения, блок коммута дни, электромагнитные реле, выходы которых соединены с исполнительными элементами,эа также снабжено распределителем, блоком развязки, управляю щим элементом и функциональными груп нами по числу испол.нительных органов каждая из которых содержит датчики положений, элементы И и два триггера, причем каждый выход распределителя соединен с соответствующим входом блока коммутации, выходы которого соединены с входами блока развязкк, а вход распределителя подключен к выходу блока автоматического управления циклом бурения, вход которого соединен с выходом управляющего элемента И, в каждой функциональной группе первые входы элементов И соединены с выходами соответствующих датчиков положений, вторые входы - с информационньк и выходами блока развязки, а- объединенные выходь элементов И подключены к сбрасывающим входам триггеров направлений, входящие бходы которых подключены к соответст вующим управляющим выходам блока раз вязки, единичные выходы -триггеров направлений соединены с обмотками электромагнитных реле, а нулевые выходы триггеров - с входами управляющего элемента И D 1Недостатком устройства является недостаточная надежность при автоматизации из-за невозможности автоматической остановки исполнительного органа, так как при отказе одного из датчиков положения сигнал с выхода элемента И не подается на .сброс триггеров направлений, соответствующей функциональной группы, вгтсутствия дублирующих ручных режи- мов управления (при сбое распределителя невозможно продолжение последовательной работы исполнительных элементов по программе), отсутствия контроля срабатывания при подаче каждой команды от датчиков положения отсутствия возможности включения исполнительных элементов подачи команд 37 ; 1 по времени или от датчиков по нелинейному закону согласно программеi невозможности расположения органов управления, индикации обычного исполнения во взрывоопасной зоне. Известна также система управления гидрофицированной установкой, содержащая датчики, электрогидроклапаны и блок их коммутации, усилители мощности, блок управления, блок оптической связи, генератор, счетчик времени, схемы совпадения, блок прогpa даы, формирователь тактовых импульсов, формирователь командных импульсов, дещифраторы команд и времени, схему ИЛИ и две схемы И-НЕ, блок индикации C JНедостатком данной системы телемеханики является недостаточная надежность при автоматизации из-за отсут- ствия возможности включения одних и тех же исполнительных элементов при различном положении счетчика (распределителя) по сложному нелинейному закону управления, невозможности подачи команд по времени от датчиков (с контролем по времени) или от датчиков в режиме ожидание по сложному алгоритму} наличия нескольких элементов: счетчика, счетчика, сохраняющего информацию при перерывах пита--ния, задатчика времени контроля, реле времени, счетчика отставания передвигающейся секции крепи от комбайна что вызывает необходимость синхронизации работы с помощью устройства стартстопной синхронизации,а также усложняет и снижает надежность работы системы управления J отсутст-ВИЯ возможности расположения органов управления и индикации обычного исполнения в взрывоопасной зоне; отсутствия дублирующих ручных режимов управления. Целью изобретения является повышение надежности в работе за счет обеспечения подачи команд по времени или от датчиков-преобразователей и обеспечения возможности расположения блоков управления и индикации ко взрывоопасной зоне. Указанная цель достигается тем, что система управления гидрофицированной установкой снабжена шифратором команд, блоком коммутации датчиков, реверсивным счетчиком, цифровым преобразователем, блоком сигнализации, шифратором временных команд, шчфратором ожидания и RS-триггером, при том выход источника питания соединен с входами блока индикации и блок управле ния, выходы датчиков-пре образователей и блока управления соединены с входами блока оптической связи, причем выходы последнего под ключены к входам шифратора команд, формирователя командных импульсов .и блока коммутации датчиков,к которо му подключён выход RS-триггера, бое диненного с блоками коммутации, формирователем тактовых импульсов , а входы.R5-триггера соединены с формирователем командных импульсов, выходы блока программы и шифратора соединены с входами реверсивного счетчика, выходы которого соединены с входами дешифратора команд и формирователя тактовых импульсов к входам последнего подключены схемы совпадения, соединенные с блоком коммутации датчиков, при этом выходы дешифратора команд соединены с входами шифраторов временных команд ожидания, дешифратора времени, схем совпадения и цифрового преобразовате ля, выходы которого подключены к входам блока коммутации электрогидро клапанов, соединенного с блоком сигйализации, а выходы последнего подключень к входам усилителей мощности соединенных с электрогидроклапанами причем выходы генератора подключены к входам блока сигнализации, генератор соединен со счетчиком времени, к которому подключена схема совпаг дения, связанная с дешифратором времени, а шифратор временных команд, шифратор ожидания и схема совпадения подключены соответственно к схемам ИЖ и И-НЕ. На чертеже схематически изображена предлагаемая система. Система содержит источник 1 питаНИН, связанный с блоком 2 индикации, блоком 3 управления, датчикамипреобразователями 4, соединенными с блоком 5 оптической связи, выходы которого подключены к шифратору 6 ко манд, блоку 7 коммутации датчиков, формирователю 8 командных импульсов, который связан с блоком 9 программы, блоком 10 коммутации электрогидроклапанов, шифратору 11 временных команд, дешифратору 12 времени, реверсивный счетчик 13, соединенный с формирователем 14 тактового импуль-. са, дешифратором 15 команд, выходы которого поданы на входы цифрового преобразователя 16, блок 17 сигнали-ч зации, соединен с генератором 18 и через усилитель 19 мощности с электрогидроклапанами 20, схемы 21 совпадения подключены к выходам счетчика 22 времени, схемы 23 совпадения, RS-триггер 24, схема ИЛИ 25, первая |схема И-НЕ 26, вторая схема И-НЕ 27 Шифратор 28 ожидания, входы котороч го соединены с выходами дешифратора 15 команд, а выход с входами первой схемы И-НЕ 26, и второй cxeivnoi ИЧ1Е Предлагаемая система управления гидрофицированной установкой предусматривает несколько режимов работы: ручной - исполнение каждой команды оператором с визуальным контролем выполненных операций; автоматический - цикличное исполнение команд, согласно программы. В исходном состоянии при включении питания реверсивный счетчик 13 устанавливается в свое состояние, в котором он бьш до выключения питания. RS-триггер 24 устанавливается так, что на прямом его выходе присутствует нуль, который тем самым через блок 7 коммутации датчиков, блок 10 коммутации электрогидроклапанов закрывает прохождение сигналов от датчиков-преобразователей 4 и через усилители 19 мощности - к электрогидроклапанам 20, а также держит счетчик 22 времени в нулевом состоянии и не дает прохождению на формирователь 14 тактового импульса командного сигнала от схемы 23 совпадения. Блок 2 индикации команд индицирует команду, в которой находится реверсивный счетчик 13. При необходимости установки реверсивного счетчика 13 в каждую, либо другую команду в блоке 3 управления с помощью переключателя Установка команд устанавливается команда в соответствующем коде. При подаче команды от блока 3 управления Лключение установки команд, реверсивный счетчик 13 через блок 5 оптической связи и шифратор 6 команд устанавливается в необходимую команду. Установка необходимой команды возможна при ручном режиме работы. S 1 Работа системы управления в ручном режиме происходит следующим об разом. На блоке 3 управления устанавливается Ручной ре.жим раб.оты, далее, например, Подъем и НКТ (работа с насрснокомпрессорными трубами). При установке команд Подъем и ИКТ с блока 3 управления через блок 5 оптической связи, формирователь 8 командных импульсов подключает соответствующие блоки для выполнения работы в программе подъем с НКТ. Блок 9 программы коммутирует на соответствующее число команд и через шифратор 5 команд подключается первая команда. Через блок 10 коммутации электрогидроклапанов и цифровой преобразователь 16 подключа ются соответствующие входы ячеек, которые коммутируют по любому нелинейному .закону согласно программе электрогидроклапаны, работающие согласно гидросхеме (в настоящем изобретении не приведенной).при подъеме НКТ. Блоками шифраторов 11 временных команд, ожидания 28, дешифратора 12 времени выбираются соответствующие команды при подъеме, кпторые работа ют лишь только по времени, от датчиков-преобразователей с контролем по времени или только от датчиков в режиме ожидания. Блок 7 комму тации датчиков коммутирует соответствующие входы датчиков-преобразователей 4 через блок 5 оптической связи. Исходное положение исполнительны элементов: элеватор в верхнем положении, ключ отведен, манипулятор отведен от устья . По команде Пуск происходит пер вая команда, Захват колонны НКТ эл ватором . По этой команде RS-триггер 24 устанавливается в единичное положение,давая возможность работа счетчику 22 времени,который начина ет отсчет времени,подключает соотве ствующие входы от датчиков-преобраз вателей 4 через блок 5 оптической связи и блок 7 коммутации датчиков Одновременно выходы реверсивного счетчика 13 через дешифратор 15 команд, цифровой преобразователь 16 и блок 10 коммутации электрогидроклапанов подключаются к соответству ющим гидравлическим распределителям 7 Блок 17 сигнализации сигнализирует, что идет первая команда. По этой команде элеватор из верхнего положе ния начинает двигаться с минимальной скоростью и подходит к датчику максимальной скорости, который переключает дпижение элеватора на максимальную скорость опускания. При срабатывании датчика максимальной скорости, который подключен на первую команду, сигнал от датчика через схему 23 совпадения подается на формирователь 14 тактового импульса которым вырабатывается импульс, пе- реключающий реверсивный счетчик 13 в другое положение, т.е. идет вторая команда и элеватор опускается с максимальной скоростью. В случае, если движение элеватора застопорится и время, отведенное для данной команды истечет, тогда от дешифратора 12 времени, через схему .21 совпадения от счетчика 22 времени подается сигнал от первой схемы И-НЕ 26 на вход 5 RS-триггера 24. Триггер обнуляется, трм самым прекращая операцию и на блоке 17 сигнализации срабатывает прерывистая сигнализация, что дан- мая команда вышла по времени. Возобтговление данной команды происходит путем повтора от блока 3 управления подачей команды Пуск. Таким образом, происходит посл.едовательное исполнение определенных команд. В любой момент работы можно дать команду Стоп с блока 3 управления, т.е. RS -триггер 24 устанавливается в нулевое -положение; и прекращает исполнение команды. Аналогично, последовательное срабатывание реверсивного счетчика возможно и не от датчика-преобразователя 4, т.е. блок 7 коммутации датчиков не подключается. Через шифратор 11 временных команд, схемы И-НЕ 25 и 27 сигнал подается через схемы 23 совпадения на вход формирователя тактового импульса 14, который вырабатывает импульс для переключения реверсивного счетчика 13 в следующее папожение. Кроме данных режимов работы, системой предусматривается срабатывание последующей команды только от датчика -преобразователя - режим ожидание, например, при захвате НКТ манипулятором, датчик манипулятора дает сигнал на раскрепление ялева7
тора, т.е. следующая команда начи.нается только после того, как манипулятор захватит НКТ. При выполнени данной команды шифратор 28 ожидания на выходе выдает нуль, тем самым не давая возможности пройти сигналу от шифратора 11 временных команд и схемы 21 совпадения кодов, через схемы ИЛИ 25 и И-НЕ 26 и 27, Таким образом, на формирователь 14 тактового импульса подается сигнал от датчиков-преобразователей 4, через блок 5 оптической связи, блок 7 коммутации датчиков и схему 23 совпадения. Продолжение работы команд в ручном режиме осуществляется каждый раз путем команды Пуск с блока 3 управления. После каждой команды в ручном режиме происходит оста8378
новка. Выход формирователя 14 тактового импульса подключается через формирователь командных импульсов 8 к 5 .входу RS-триггера 24, который обнуляясь, прекращает исполнение команды .
Автоматический режим работы цикличное исполнение команды без остановок согласно программы, где
необходимые команды подаются от датчиков-преобразователей 4 или по времени . Режим отличается от ручного тем, что сигнал от формирователя 14 тактового импульса не подается к
5 входу RS-триггера 24 от формирователя 8 командных импульсов. Таким образом, последующая команда испол|няется автоматически - от реверсивного счетчика 13.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для возбуждения сейсмических колебаний | 1986 |
|
SU1383244A1 |
| Устройство для управления обменом данными | 1989 |
|
SU1795466A1 |
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| УСТРОЙСТВО ДЛЯ СИГНАЛИЗАЦИИ ОТКЛОНЕНИЙ ПАРАМЕТРОВ ПРИ ДОПУСКОВОМ КОНТРОЛЕ | 2016 |
|
RU2617982C1 |
| УСТРОЙСТВО ИЗБИРАТЕЛЬНОГО ВЫЗОВА | 2005 |
|
RU2299525C1 |
| Информационно-управляющая система центрального теплового пункта жилых общественных и промышленных зданий | 1987 |
|
SU1511751A1 |
| СПОСОБ КОДИРОВАНИЯ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО КОДИРОВАНИЯ | 2005 |
|
RU2281608C1 |
| Устройство автоматического управления выдвижкой секций базы угледобывающего агрегата | 1983 |
|
SU1120111A1 |
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ ОБЪЕКТОВ С ИНЕРЦИОННЫМИ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 1973 |
|
SU393762A1 |
| Устройство для контроля электрического монтажа | 1983 |
|
SU1151991A1 |
СИСТЕМА .УПРАВЛЕНИЯ ГИДРОФИЦИРОВАННОЙ УСТАНОВКОЙ, содержащая датчики-преобразователи, электрогидроклапаны и блок их коммутации, уси-лители мощности,блок управления,блок оптической связи, генератор, счетчик времени, схемы совпадения, блок ,программы, формирователь тактовых импульсов, формирователь командных импульсов, дешифраторы команд и времени, схему ИЛИ, две схемы И-НЕ, блок индикации, отличающаяся тем, что, с целью повышения надежности в работе за счет обеспечения подачи команд по времени или от датчиковпреобразователей и обеспечения возможности расположения блоков управления и индикации во взрывоопасной зоне, она снабжена.шифратором команд, блоком коммутации датчиков, реверсивным счетчиком, цифровым преобразователем, блоком сигнализации, шифратором временных команд, шифратором ожидания и R-S-триггером, при этом выход источника питания соединен с входами блока индикации и блока управления, выходы датчиков-преобразователей и блока управления соединены с входами блока оптической связи, при чем выходы последнего подключены к входам шифратора команд, формирователя командных импульсов и блока коммутации датчиков, к которому подключен выход RS-триггера, соединенного с блоками коммутации, формирователем тактовых импульсов, а входы RS-триггера соединены с формирователем командных импульсов, выходы блока программы и шифратора соединены с входами реверсивного счетчика, выходы которого соединены с входами дешифра(Л тора команд и формирователя тактовых импульсов, к входам последнего подключены схемы совпадения, соединенные с блоком коммутации датчиков, при этом выходы дешифратора команд Тэединены с входами шифраторов временных команд, ожидания, дешиЛратора со времени, схем совпадения и цифрового преобразователя, выходы которого подключены к входам блока коммутации сх электрогидроклапанов, соединенного со с блоком сигнализации, а выходы по« следнего подключены к входам усилителей мощности, соединенных с злектрогидроклапанами, причем выходы генератора подключены к входам блока сигнализации, генератор соединен с счетчиком времени, к которому подключена схема совпадения, связанная с дешифратором времени, а шифратор временных команд, шифратор ожидания и схема совпадения подключены соответственно к схемам ИЛИ и И-НП.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для вертикального вытягивания труб | 1974 |
|
SU652128A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖКОЙ СЕКЦИИ ШАХТНОЙ ГИДРОКРЕПИ | 0 |
|
SU245710A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
