1
Известны устройства для дистанционного управления электровозами и другими транспортными средствами, содержащие пневматический или электрический привод контроллера машиниста и вспомогательный пульт управления. Вращающий момент на вал контроллера от приводного устройства передается посредством передач с храповыми, мальтийскими или специальными зубчатыми механизмами.
Однако эти устройства обеспечивают переключения лишь таких контроллеров, у которых углы поворота вала по позициям строго ограничены, равны или кратны наименьшему из них.
При применении таких устройств обеспечивается только дистанционное переключение контроллера, поскольку применяемые передачи связывают вал контроллера, причем для ручного управления необходимы дополнительные устройства, расцепляющие и освобождающие этот вал.
Целью изобретения является обеспечение возможности дистанционного и ручного переключения позиций контроллера с произвольной величиной угла поворота вала между позициями.
Это достигается использованием для соединения вала контроллера с редуктором и приводным двигателем электрически управляемого расцепителя в виде электромагнитной муфты, фрикционной магнитной муфты или зубчатой муфты с электромагнитным приводом. Расцепитель включается посредством блока управления и остается включенным пока вал контроллера поворачивается на требуемый угол. Расцепитель отключается автоматически, для чего применены магнитоуправляемые датчики позиций, взаимодействующие с валом контроллера.
Это позволяет обеспечить переключение контроллера на любую заданную позицию при произвольной величине угла между позициями. При отключенном расцепителе вал контроллера не связан с редуктором, что обеспечивает и беспрепятственное ручное управление.
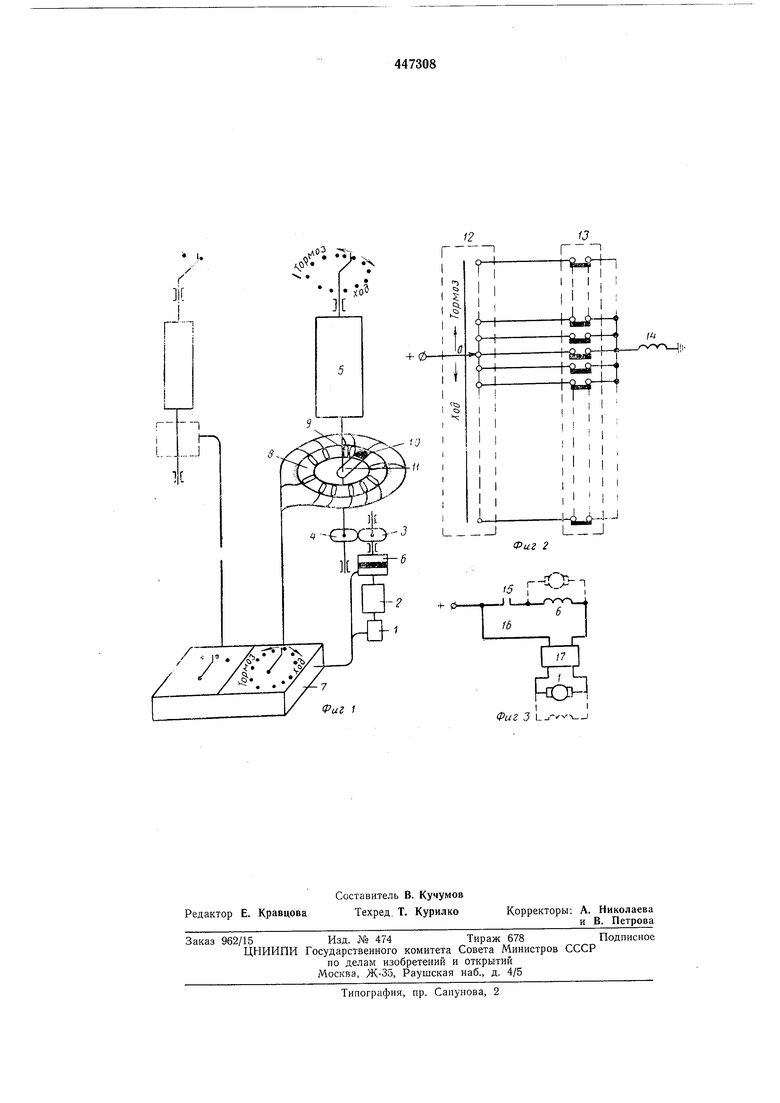
На фиг. 1 приведена кинематическая блоксхема предложенного устройства; на фиг. 2- блокировочные контакты переключателя; на фиг. 3 - принципиальная электрическая схема включения расцепителя и двигателя.
Устройство содержит привод коитроллера в виде приводного двигателя 1, понижающего редуктора 2, зубчатых колес 3 и 4. Колесо 4 жестко закреплено на валу контроллера 5 и постоянно сцеплено с колесом 3, установленным в подшипниках на корпусе коптроллера. Валы колеса 3 и редуктора 2 связаны через электрически управляемый расцепитель 6.
Позиции переключаются дистанционно с пульта 7 управления, а вручную - рукояткой контроллера.
Узел контроля позиций выполнен в виде кольцевого основания 8, жестко связанного с корпусом и расположенного вокруг вала контроллера. На этом основании по окружности с различными интервалами, соответствующими позициям контроллера, крепятся датчики 9 позиций в виде, например, магнитоуправляемых герконовых реле (герконов) с н. з. контактами. Каждый из датчиков прикреплен к основанию таким образом, что обеспечиваются перемещение и точная установка датчиков при регулировке устройства. С датчиками позиций взаимодействует магнит 10, установленный на планке 11. Эта планка жестко закреплена на валу контроллера, поэтому при повороте вала магнит поочередно взаимодействует со всеми датчиками позиций.
Задатчиком позиций в схеме управления (см. фиг. 2) является самофиксирующийся переключатель 12 пульта управления 7 с одним н. 3. контактом, замыкающимся только на заданной позиции. Количество контактов переключателя равно количеству позиций контроллера. Контроль позиций производится посредством контактов 13 датчиков позиций 9. Слаботочное реле 14 со своими контактами 15 и 16 (см. фиг. 3) служит для управления расцепителем 6 и приводным двигателем 1.
На фиг. 3 приведена схема включения расцепителя и двигателя для двух случаев. В первом случае расцепитель не реверсивный, его обмотка 6 включается непосредственно через контакт 15. В этом случае двигатель I питается через блок 17 реверса. Переключатель этого блока взаимодействует с рукояткой переключателя позиций на пульте 7, поэтому полярность напряжения на выходе этого блока зависит от направления перемещения рукоятки.
Для второго случая схема показана пунктиром. Такое включение двигателя и расцепителя применимы, если расцепитель 6 реверсивный (например реверсивная электромагнитная муфта). Это целесообразно для повыщения быстродействия устройства, так как в этом случае двигатель 1 при переключении позиций можно не отключать.
Работу устройства поясним на примере переключения контроллера из нулевой позиции на позицию «ход и обратно.
В исходном положении переключатель 12 замкнут на нулевой позиции, однако соответствующий контакт 13 разомкнут, поэтому реле 14 обесточено, расцепитель 6 и двигатель 1 отключены. Если переключатель 12 перевести на первую позицию «ход, то через
соответствующий замкнутый контакт 13 включается реле 14, которое контактами 15 и 16 включает расцепитель 6 и двигатель 1. Это обусловит поворот вала контроллера 5 и
планки 11 с магнитом 10. Вал поворачивается, пока он не займет положение первой позиции, где под действием магнита разомкнется контакт 13 датчика первой позиции, выключится реле 14 и отключится расцепитель
6 и двигатель 1. После отключения расцепителя вал контроллера зафиксируется под действием пружины фиксатора. При отключенном расцепителе двигатель 1 может продолжать вращаться. Поэтому в описываемом устройстве отпадает необходимость в применении дополнительных устройств для торможения и быстрой остановки двигателя. Если далее переключатель 12 перевести на вторую позицию, а затем и на последующие, совершаются аналогичные операции и вал контроллера последовательно займет положения на второй и последующих позициях.
Сброс отдельных позиций происходит аналогично при обратном ходе рукоятки переключателя позиций за счет реверса двигателя или путем примепепия реверсивного расцепителя. Устройство обеспечивает также быстрый сброс позиций с отключением силовой цепи электровоза. Для этого переключатель 12 следует сразу перевести в нулевую позицию.
Тогда расцепитель 6 остается включенным,
пока вал контроллера не займет нулевую
позицию.
Работа устройства при торможепии электровоза аналогична.
Предмет изобретения
1.Устройство для дистанционного управлеПИЯ рудничным электровозом, содержащее
электрический привод контрОоЧлера мащиниста с пультом управления, зубчатую передачу, соединяющую вал контроллера с редуктором и приводным двигателем, и датчики
позиций, отличающееся тем, что, с целыг обеспечения возможности дистанционного и ручного переключения позиций контроллера с нронзвольпой величиной угла поворота вала между позпцнямн, оно снабжено электрически
управляемым расцепи гелем, кинематически соединенным с валом контроллера и электрически соединенным с указанным пультом управления через датчики позиций.
2.Устройство по п. 1, отличающееся тем, что, с целью повыщения надежности н
точности переключения позиций и упрощения схемы управления, датчики позиций вынолнены в виде магнитоуправляемых герконовых реле с н. 3. контактами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дистанционное электрогидравлическое преселективное устройство управления | 1986 |
|
SU1465342A1 |
| Устройство для контроля местонахождения струга в лаве | 1979 |
|
SU883408A1 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |
| ЛОКОМОТИВНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРА | 2016 |
|
RU2641402C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ПРИВОДОМ ГОРНОЙ МАШИНЫ | 1992 |
|
RU2087710C1 |
| АВТОМАТИЗИРОВАННЫЙ СТАНОК ДЛЯ ПРОДОРАЖИВАНИЯ ЯКОРНЫХ КОЛЛЕКТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 2005 |
|
RU2291763C1 |
| ГРУППОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПЕРЕКЛЮЧАТЕЛЬ | 2006 |
|
RU2331131C1 |
| УСТАНОВКА ДЛЯ ПОДВОДНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 1992 |
|
RU2040231C1 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ ДЛЯ ПОСТАНОВКИ ЭЛЕКТРОВОЗОВ ПЕРЕМЕННОГО ТОКА НА ПОЗИЦИЮ ТЕХОБСЛУЖИВАНИЯ | 2004 |
|
RU2258011C1 |
| ВЕТРОДВИГАТЕЛЬ | 1990 |
|
RU2013644C1 |