54) ЧАС/ГОГНЫЙ ДАТЧИК УСИЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНЫЙ ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2019 |
|
RU2709706C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2006 |
|
RU2362714C2 |
| ВИБРОЧАСТОТНЫЙ ДАТЧИК АБСОЛЮТНОГО ДАВЛЕНИЯ | 2017 |
|
RU2660621C1 |
| ОБРАБАТЫВАЮЩИЙ ЦЕНТР С ПАРАЛЛЕЛЬНОЙ КИНЕМАТИКОЙ | 2012 |
|
RU2547359C2 |
| Силоизмерительный преобразователь с частотным выходом | 1977 |
|
SU659917A1 |
| Частотный датчик давления | 1983 |
|
SU1134891A1 |
| Частотный датчик давления | 1980 |
|
SU979922A1 |
| Вибрационно-частотный датчик силы | 1972 |
|
SU506220A1 |
| Дождевальная машина с торцевой подачей воды в движении двухзвенным шарнирным водозабором | 2021 |
|
RU2760852C1 |
| Преобразователь силы | 1982 |
|
SU1278629A1 |
1
Изобретение относится к измерительной технике к может быть применено при измерениях малых усилий, ecjm требуется частотный выход..
В известных датчиках усилий с частотным выходом, содержащих разонатор с системой возбуждения и упругую опору, конструкпия упру1 их опор вызывает погрешности рт изгибающих усилий, а также ногрешиости нелинейности.
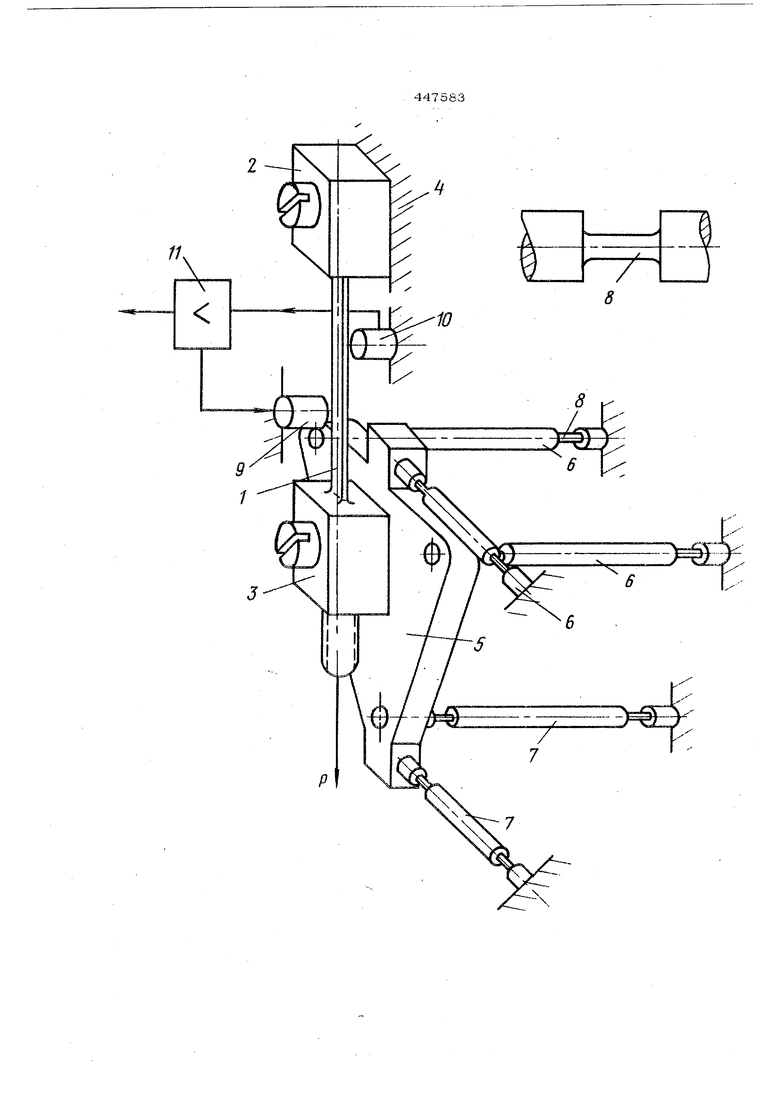
Предлагаемый датчик отличается от известных-..тем, что упругие опоры выполнены в виде группы перпендикулярных к оси резонатора шарнирных стоек, образую тих трехзвенник и двухзвенник, а оси стоек одного звена перпендикулярны к осям стоек другого, причем их суммарная жесткость в направлении оси резонатора и его продольная жесткость находятся в ;отношении, меньшем чем 1:50, На чертеже изображена схема предлагаемого датчика.
По краям резонатора 1 смонтирова 1Ы массивные головки 2 и 3, выполненные с резонатором как одно целое. Головка 2
укреплена на корпусе 4, гоповка 3 - на плате 5. Последняя соединена с основанием пятью шарнирными стойками 6 и 7, оси которых перпендикулярны к оси резонатор. .Три стойки 6 образуют П-образный трехзвенник и лел«ат в одной плоскости а две стойки 7 образуют Г-образный двухзвенник в другой параллельной плоскости. Стойки выполнены с упругими шар
нирами 8, представляющими собой, например, шейки на стержне стойки с пониженной жесткостью.
Расстояние между шарнирами и их жесткость выбирают такими, чтобы суммарпая жесткость стоек в направленни оси резонатора и его продольная жесткость находились в отношении, меньшем чем 1,; 1:50. Соотношение жесткостей выбирают, исходя из требуемой точности датчика. По
сторонам резонатора установлены электромагнитный возбудитель 9 и адаптер 10, соединенные с уси/штелем 11.
При работе датчика резонатор 1 возбуждается системой возбуждения (возбудитель
9, адаптер 10 и усилитель 11) с собствешюй частотой поперечных колебаний. При приложении измеряемой нагрузки Р к резьбовому хвостовику гоповки 3 собстЕвииая частота резонатора изменяется. Пр этом основная часть силы Р расходуется па дeфop.aцию резонатора, так как ж..кость стоек ьгеньше его жесткости.
Изгибающие моменты, возникающие, например, от внеосных сил, компенсируются растягиваюБШми и слшмаюишми усилиями стоек, не изменяя Практически собственной частоты резонатора.
Предмет изобрете ния
Частотный датчик усилий, содерясащий резонатор, один конец которого закреплен
в корпусе, а другой через плату - на упругой опоре, и систему возбуждения, о т л ичаюшийся тем, что, с целью уве пичения точности, упругие опоры вьигох . : ;
нены Б виде группы перпендикуляргшгх к оси резонатора шарнирных стоек, образук щих трехзвенник и двухзвенник, а оси стоек одного звена перпендикулярны к
осям стоек другого, причем их суммарная жесткость в направлении оси резонатора
и его продольная жесткость находятся в -отношении, меньшем чем 1:50.
