зонатора 12 связан с малым -плечом рычага 7, другой-с консольной балкой 6. Резонатор 12 выполнен за одно целое с упругим элементом 1 и является его частью. Механические напряжения в резонаторе близки к нулю при отсутствии внешней нагрузки () на большом плече рычага 7.
Однако в некоторых -случаях в резонаторе могут быть созданы -предварительные напряжения растяжения или сжатия.
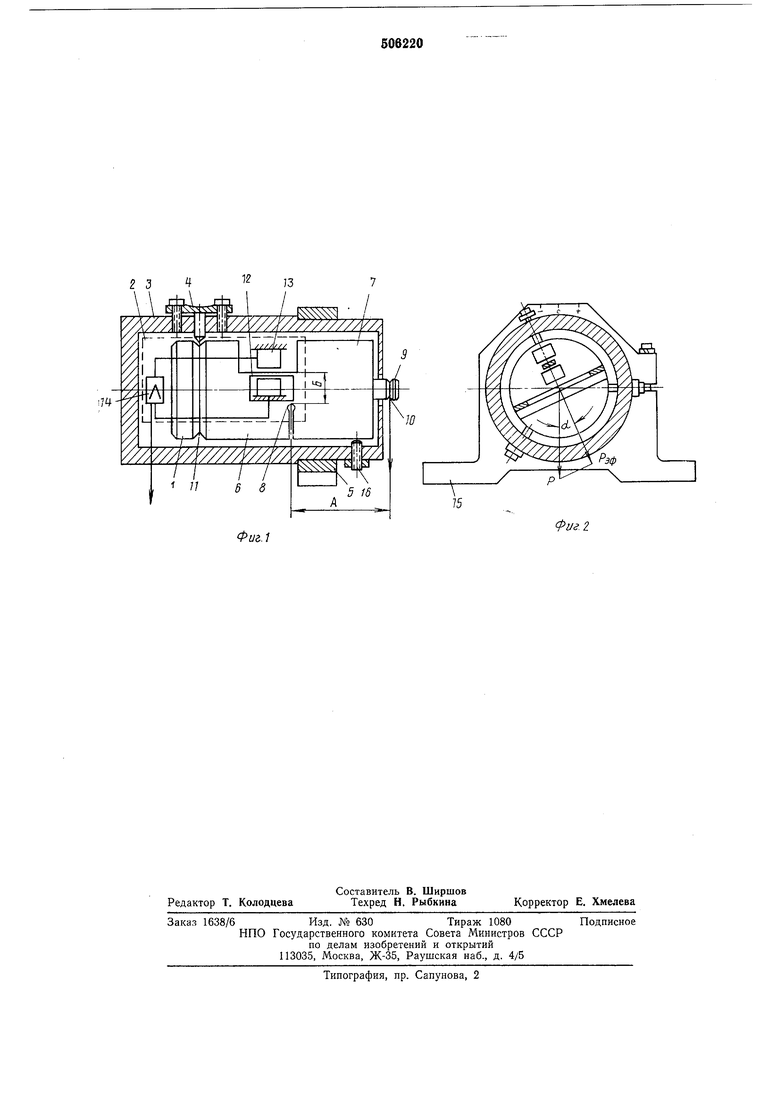
Поляризованные электромагниты 13 установлены с двух сторон резонатора с небольшим смещением от его середины по длине.
Один из электромагнитов 13 (адаптер) соединен с входом усилителя 14 и служит для .преобразования механического колебания резонатора в колебания электрического напряжения.
Другой электромагнит (возбудитель) соединен с выходом усилителя 14 и служит для преобразования -колебаний электрического тока в электромагнитную силу раскачки резонатора 12.
Усилитель 14 собран на полупроводниковых элементах и работает в режиме амплитудного ограничения. Выходной сигнал датчика снимается с усилителя 14 через имеющиеся в нем дополнительные каскады.
Корпус 3 датчика служит для закрепления в нем упругого элемента 1 -и защиты датчика от -внешних воздействий.
На корпусе 3 по окружности через 120° установлены ножевые или конусные зажимы 4, один из которых в месте крепления с корпусом 3 имеет упругий участок. Острые части зажимов 4 упираются в кольцевую «анавку 11 и тем самым фиксируют упругий элемент 1 в корпусе 3.
Упругий элемент 1 с корпусом 3 закреплен в установочном кронштейне 5 таким образом, что ось упругих шарниров 8 наклонена по отношению к горизонту на угол а.
Конструкция кронштейна 5 позволяет поворачивать В нем корпус 3 так, чтобы чувствительность (девиация) при номинальной нагрузке соответствовала требуемой величине.
На кронштейне 5 имеются штрихи и знаки «-J- и «-, а на корпусе 3 индекс, которые указывают направление поворота для увеличения или уменьшения чувствительности. Кронштейн 5 снабжен лапками 15, посредством которых датчик закрепляется на установочной поверхности.
Ограничитель нагрузки 16 представляет собой винт, ввернутый в корпус 3 и зафиксированный в таком положении, чтобы при перегрузке длинное плечо рычага 7 упиралось в торец винта.
Датчик работает следуюшим образом.
При воздействии измеряемой силы Р на большое плечо рычага 7 в резонаторе 12
возникают продольные напряжения, изменяющие его поперечную жесткость, а следовательно, и частоту его колебаний. Изменение частоты несет информацию о величине действующей нагрузки.
Автоколебательный режим работы резонатора обеспечивается системой возбуждения. Связь углового рычага 7 с консольной
балкой 6 посредством сосредоточенных упругих шарниров 8 исключает паразитные резонансы, искажающие монотонность выходной характеристики датчика и вредные напряжения .изгиба в заделках резонатора 12. Крепление упругого элемента 1 в корпусе 3 с помощью трех ножевых или конусных упругих зажимов 4 исключает влияние затяга элементов крепления на стабильность характеристики выходного сигнала датчика.
Закрепление упругого элемента 1 с корпусом 3 с возможностью поворота в установочном кронщтейне 5 создает возможность корректировки чувствительности датчика, так как при повороте корпуса 3 изменяется величина эффективной силы, являющейся составляющей измеряемой силы Р
РВФ -Я-СОЗа,
где а-регулируемый угол наклона оси упругих шарниров 8 к горизонту.
Формула изобретения
1.Вибрационно-частотный датчик силы, содержащий размещенный в корпусе упругий элемент в виде цилиндрической консольной балки с угловым рычагом, частотный преобразователь с механическим резонатором в форме призматического стержня и установочный кронштейн, отличающийся тем, что, с целью повышения точности, угловой рычаг упругого элемента соединен с цилиндрической частью консольной балки посредством сосредоточенных упругих шарниров с общей осью поворота, перпендикулярной к продольной оси
резонатора.
2.Датчик по п. 1, отличающийся тем, что, с целью повышения точности, упругий элемент закреплен в корпусе на трех конусных упругих зажимах, входящих своими конусами в кольцевую канавку треугольного профиля, выполненную на цилиндрической части консольной балки.
3.Датчик по пп. 1 и 2, отличающийс я тем, что, с целью упрощения коррекции
чзвствительности, упругий элемент с корпусом закреплены с возможностью поворота в установочном кронштейне так, что ось упругих шарниров наклонена по отношению к горизонтальной плоскости.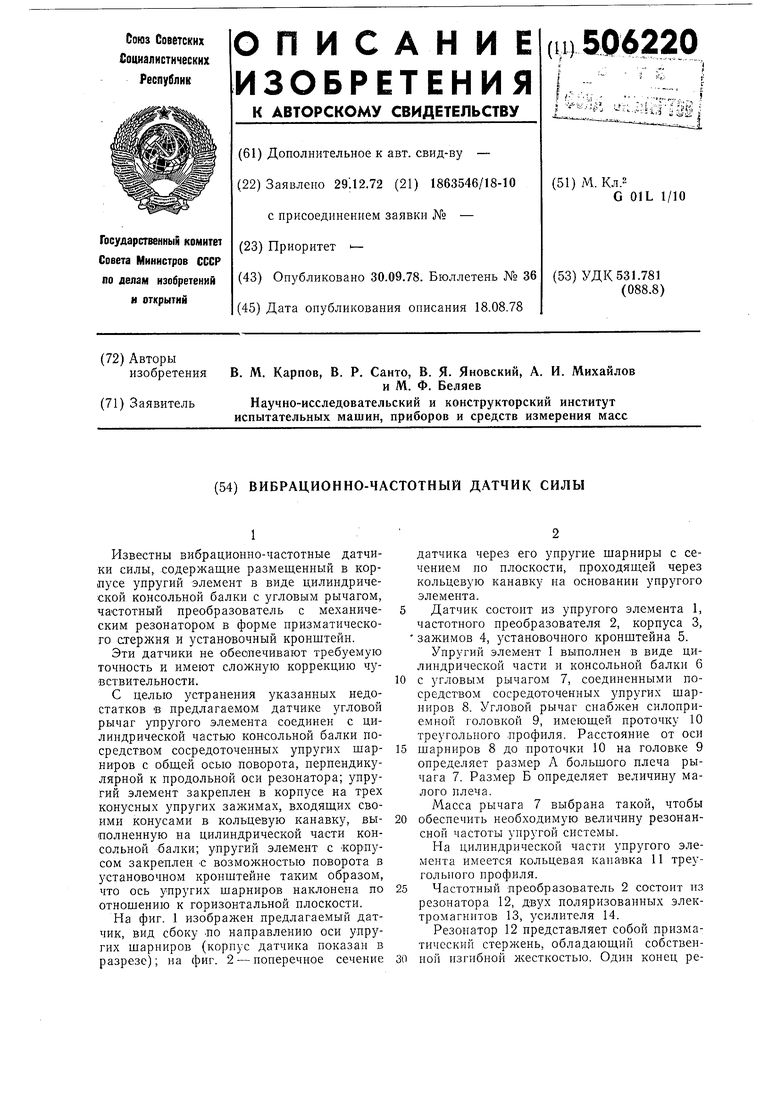
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь силы | 1982 |
|
SU1278629A1 |
| РЕЗОНАТОР СИЛОЧУВСТВИТЕЛЬНЫЙ | 2006 |
|
RU2329511C2 |
| МИКРОСИСТЕМНЫЙ ГИРОСКОП | 2011 |
|
RU2466354C1 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ ДВУХКОМПОНЕНТНЫХ КОЛЕБАНИЙ НА ОДНОКОМПОНЕНТНОМ ВИБРОВОЗБУДИТЕЛЕ | 1990 |
|
RU2017108C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В АЭРОДИНАМИЧЕСКИХ ТРУБАХ | 2013 |
|
RU2539763C1 |
| Устройство для испытаний моделей летательных аппаратов в аэродинамических трубах | 2017 |
|
RU2685576C2 |
| АВТОМАТ АВАРИЙНОГО ОТКЛЮЧЕНИЯ ГАЗОПРОВОДА | 1998 |
|
RU2138720C1 |
| НЕСУЩИЙ ВИНТ | 2006 |
|
RU2338665C2 |
| КАМЕРТОННЫЙ МИКРОГИРОСКОП | 2014 |
|
RU2580871C1 |
| АГРЕГАТНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК И НАСАДКА К НЕМУ | 1999 |
|
RU2161554C1 |