(54) ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТИВНО-ТРАНСФОРМАТОРНЫЙ ДАТЧИК | 1997 |
|
RU2138011C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2367902C1 |
| Устройство для контроля положения рабочих органов механизмов | 1982 |
|
SU1023374A1 |
| Дифференциально-трансформаторный датчик перемещений | 1985 |
|
SU1270549A1 |
| Преобразователь перемещения в код | 1986 |
|
SU1363463A1 |
| МАГНИТОУПРУГИЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ | 1971 |
|
SU321673A1 |
| Устройство для неразрушающего контроля сжимающих механических напряжений в низкоуглеродистых сталях | 2017 |
|
RU2658595C1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЙ ТРАНСФОРМАТОРНОГО ТИПА | 1991 |
|
RU2031358C1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 1997 |
|
RU2127866C1 |
| Дифференциальный датчик линейных перемещений | 1987 |
|
SU1612206A1 |
Изобретение относится к автоматике в, может быть использовано для преобразования в электрический Ъигнал механического перемещения органов технологических механизмсш, например конвейер ж на участках загрузки гЬрно-обогатитепьных комбинатов, металлургических и химиче ских заводов.
Известны индуктивными датчики переме.щения, содержащие П-образный магнитопровод с обмоткой и подвижный якорь из ферромагнитного материала.
Однако при появлении около таких датчиков ферромагнитных масс они могут вырабатьюать ложные сигналы, н ложные сигналы появляются, например, при засыпании магнитопровода дртчИка любым ферромагнитным материалом (железная руда, металлическая стружка и т. п.).
Предложенный индуктивный датчик пербмещения отличается тем, что оН содержит второй П-образный матНитопровод с обмоткой, расположенной в плоскости пер-
I пендикулярной Той, в которой расположен
первый магнитопровод. Якорь датчика вы;-; :-. полнан из череду1Ывихс2 ферромагнитных и неферромагнитных пластин, параИлальных одному. из магнитопррводов.
Это позволяет, исключить влишие сторонних ферромагнитных масс на прсщесс фсфмирования выходного сигнала датчика . и тем самым исключить возможность выдачи датчиком ложных сигналов.
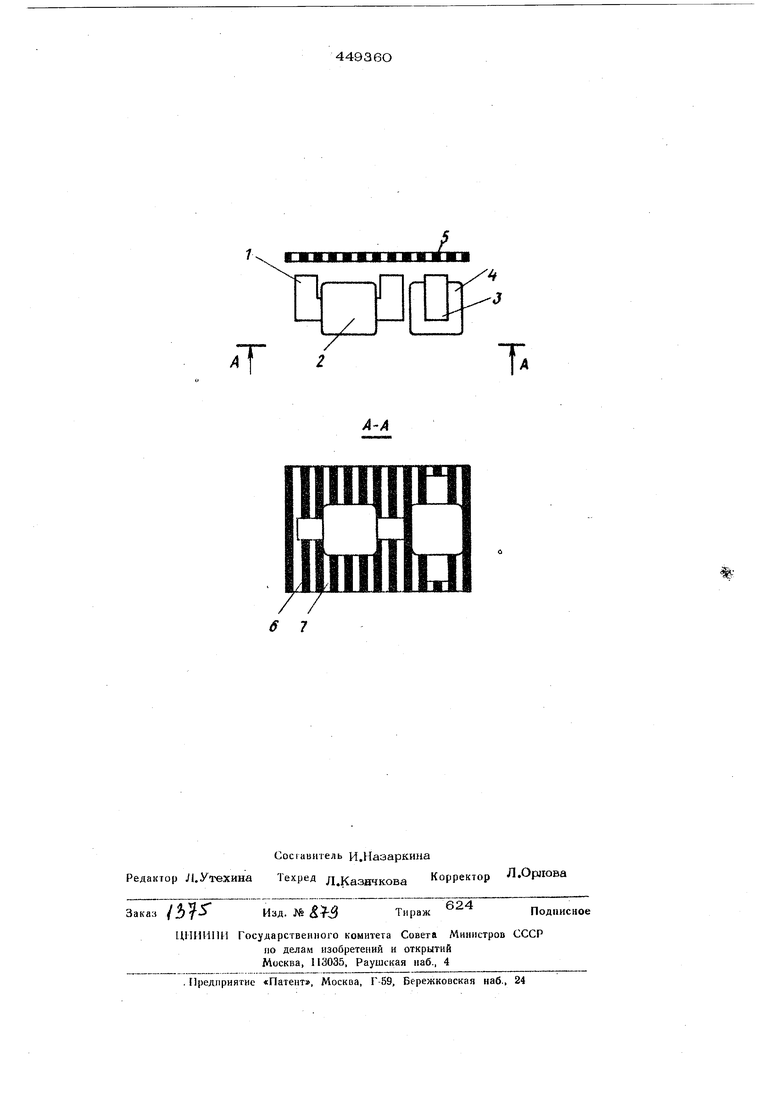
На чертеже показана схема предложенного датчика.
Датчик .состоит из П-образного магнитопровода 1 с обмоткой 2 и П-образного магнитояровода 3 с с моткой 4. Магннтопроврды 1 и 3 расположены во взаимно, перпендикулярных плоскостях.
Со стороны полюссв магнитопроводов 1 и 3 на определенном расстоании от irax размешен якорь 5, обший для обоих магннтопроводов. Он представляет собой набор пластин из ферромагнитного 6 и нефер- ромагнитного 7 материалов. Пластины
расположены поочередно так, что каждая феррюмагннтная пластина с обеих сторон ямеет неферромагнитную пластину 7 и
наоб.орот, п этому якорь 5 в одном направлении имеет ярко вьфаженную магнитную анизотропность. Якорь ,5 может лереме- щаться в двух противоположных направле.ниях в плоскости, параллельной плоскости цолюсов магнитопроводов 1 и 3. Обмотки 2 и 4 могут быть подключены каждая к любой известной электронной изм рительной системе (на чертеже непоказан которая осуществляет формирование электрического сигнала, пропорционального вели чине перемещения якоря 5. Если якорь 5 смещен вправо от магни- топроводов 1 и 3, то на выходе измерительной системы каждой обмотки сигнал отсутствует. При перемещении якоря 5 справо налево он сначала перекрьюает магнитопровод 4, Ферромагнитные пластины 6 якоря 5 расположены вдоль марнитопровода, и магнитный поток замыкается через них. Сопротивление магнитной системы обмотки 3 уменьшается и ее измерительная система формирует сигнал. При дальнейшем перемещении якоря 5 влево он перекрьтает и магнитопровод 1, Ферромагнитные пластины 6 якоря 5 расположены перпендикулярно по отношению к магнитопроводу 1 и мало влияют на изменение магнитного сопротивления магнитной системы обмотки 2, На выходе измерительной системы ее сигнал отсутствует. Если вместо якоря 4 к магнитопроводу поднести сплошную ферромагнитную полосу, перекрывающую оба магнитопровод а 1 и 3, то на выходе измерительной -системы каждой обмотки появляется сигнал. Тот же результат получается при засыпке магнитопроводов 1 к 3 сыпучим ферромагнитным материалом, что нередко случается в металI/О ргической промышленности. ; Таким образом, если истинным сигналом контроля считать сигнал на выходе измерительной системы магнитопровода, расположенного параллельно ферромагнитным : пластинам якоря, появляющийся в момент отсутствия сигнала на выходе измерительной системы второго магнитопровода, то такой сигнал не зависит- от влияния пострронних ферромагнитных масс. При этом по одновременному появлению сигналов с измерительных систем можно контролировать наличие помехи в виде посторонней ферромагнитной массы. дмет изобретения Индуктивный датчик перемещения, содержащий П-образный магнитопровод с обмоткой и подвижный якорь, отличающийся тем, что, с целью повыщвния надежности датчика, в него введен второй П-образный магнитопровод с обмоткой, расположенный в плоскости, перпендикулярной той, в которой {Расположен первый магни- опровод; причем якорь выполнен из череующихся ферромагнитных и неферромагнитых пластин, параллельных одному из маг-итопроводов.
йгжад.иё м ,
/
Т
