1
Изобретение относится к производству монтажных работ с использованием грузоподъемных кранов для перемещения различных промышленных конструкций горизонтального и вертикального типов, весовые и габаритные параметры которых превышают паспортные характеристики одного крана.
Известны способы перемеш,ения конструкций двумя кранами путем совместной и одновременной работы нескольких грузоподъемных и грузоповоротных механизмов каждого крана.
Для повышения эффективности монтажных работ и исключения аварийных ситуаций предлагается неремещение конструкций после подъема их на начальную высоту одновременно крюками обоих кранов осуществлять путем чередования синхронной работы механизмов подъема стрел двух кранов до отклонения грузовых строп на расчетную и контролируемую величину и механизмов поворота стрел до исходного вертикального положения грузовых строп, при этом процесс перемещения конструкций производить нри стационарном положении кранов без применения вспомогательных тяговых средств, а циклы чередования синхронной работы одних и тех же механизмов обоих кранов повторять до установки перемещаемой конструкции в проектное положение.
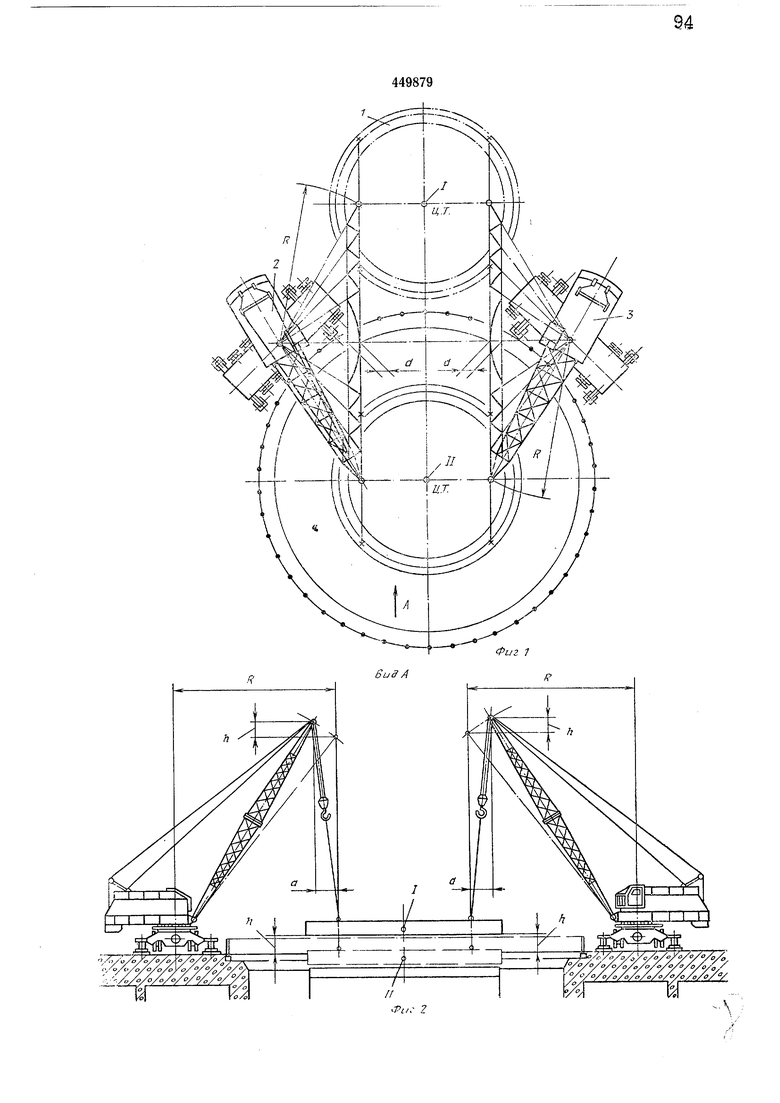
На фиг. 1 изображена схема перемещения двумя кранами конструкции горизонтального типа; на фиг. 2-вид по стрелке А; на фиг. 3- схема перемещения двумя кранами конструкции вертикального типа; на фиг. 4 - то же, план.
Установка в проектное положение конструкции горизонтального типа, например опорного кольца 1, заключается в том, что после
подъема его на начальную высоту одновременно крюками двух кранов 2 и 3 над исходным положением I, дальнейшее перемещение конструкции к проектному положению II производят чередованием синхронной работы механизмов изменения вылетов R двух кранов и механизмов разворота стрел кранов до тех пор, пока конструкцию не вывесят над проектным положением, после чего ее одновременно крюками двух кранов опускают на заданный
уровень.
Операции подъема конструкций стрелами кранов производят до отклонения грузовых строп от вертикали на расчетную и контролируемую величину d, с учетом которой выбираются краны необходимой грузоподъемности и минимального вылета R. Для сохранения равномерного распределения весовой нагрузки на краны и уменьшения влияния на их устойчи вость дополнительных усилий на всех этапах
перемещения конструкции производят кои-.
93
троль над отклонением строн на заданную величину d, горизонтальностью и пройденным ею расстоянием, носле каждой операции. Контролируют отклонение строп путем замеров рейками размеров h, соответствующих высоте подъема стрел кранов и конструкции относительно ее исходного положения I, после подъема крюками кранов на начальную высоту.
Синхронность поочередной работы одних и тех же механизмов кранов обеспечивается одновременным вынолнением команд операторами кранов, имеющими визуальную связь с руководителем монтажных работ.
Установка в проектное положение конструкции 4 вертикального типа, например мачты, осуществляется в несколько последовательных этапов (положений) III, IV, V, VI и VII. Положение III конструкции 4 - исходное на ложементе 5; положения IV и V - ответственные с точки зрения устойчивости кранов - этапы ее подъема в промежуточное; положение VI - вертикальное; положение VII - конечное, проектное положение конструкции на фундаменте 6. На этапе подготовительных работ производят расстановку кранов 2 и 3 в рабочее ноложение на вылетах R. После подъема конструкции одновременно крюками двух кранов из исходного положения III в положение IV и дальпейшее ее перемещение производят чередованием в онределенном технологическом порядке синхронной работы механизмов изменения вылетов двух кранов, механизмов разворота стрел и механизмов подъема крюков двух кранов в пределах контролируемых величин d, углов аир до тех пор, пока конструкцию не поднимут в положение, близкое к нейтральному, после чего ее переводят за нейтральное положение V уже чередованием синхронной работы механизмов разворота стрел двух кранов и механизмов подъема их крюков до установки конструкции, при необходимости, на технологические подставки 7 или в промежуточпое положение VI. Контролируют величины d и а на этом этапе перемещения конструкции с помощью сектора 8, закрепленного около оси поворота конструкции и имеющего риски углов р , соответствующие угловому перемещению при подъеме крюками или стрелами кранов относительно исходного положения III. При перемещении конструкции в положение VII вначале осуществляют поочередное передвижение кранов на расстояние S и установку их в новое рабочее положение на вылетах г путем последовательного выполнения операций ослабления грузовых строп и разворота стрелы сначала одного крана, а потом другого; затем конструкцию поднимают на необходимую по технике безопасности высоту
5 одновременно крюками двух кранов, далее перемещают и устанавливают в проектное положение VII путем чередования синхронной работы механизмов изменения вылетов двух кранов, механизмов разворота стрел и меха0 низмов подъема крюков двух кранов.
Предмет изобретения
Способ перемещения конструкций, двумя
5 кранами путем совместпой и одновременной работы нескольких грузоподъемных и грузоповоротных механизмов каждого крана, о тличающийся тем, что, с целью повышения эффективности монтажных работ и исключения аварийных ситуаций, перемещение конструкций после подъема их на начальную высоту одновременно крюками обоих кранов осуществляют путем чередования синхронной работы механизмов подъема стрел двух кранов до отклонения грузовых строп на расчетную и контролируемую величину и механизмов поворота стрел до исходного вертикального положения грузовых строн, при этом процесс перемещения конструкций производят при
0 стационарном положении кранов без применения вспомогательных тяговых средств, а циклы чередования синхронной работы одних и тех же механизмов обоих кранов новторяют до установки перемещаемой конструкции в
5 проектное положение.
IV
VI
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ перемещения подвешенной на связанной с двумя кранами траверсе конструкции | 1989 |
|
SU1791347A1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |
| Способ монтажа конструкции стреловым краном | 1986 |
|
SU1323530A1 |
| СПОСОБ РАБОТЫ СТРЕЛОВОГО САМОХОДНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2593179C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
SU1835768A1 |
| Способ монтажа пространственных блоков покрытия | 1984 |
|
SU1294945A1 |
| Кран-трубоукладчик | 1990 |
|
SU1766832A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ОПОРНЫХ КОЛОНН САМОПОДЪЕМНОЙ ПЛАВУЧЕЙ ПЛАТФОРМЫ | 1998 |
|
RU2140489C1 |
| ГРУЗОЗАХВАТНАЯ ТРАВЕРСА | 1971 |
|
SU412112A1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ЗАХВАТНОГО ОРГАНА ПОВОРОТНОГО КРАНА ИЛИ ДРАГЛАЙНА | 1956 |
|
SU106008A1 |