Изобретение относится к области подъемно-транспортного оборудования, в частности к производству монтажных работ с использованием грузоподъемных кранов для перемещения различных типов конструкций.
Известен способ перемещения на связанной с двумя кранами траверсе конструкции, при котором конструкцию из начального положения поднимают на определенную высоту, после чего ее перемета ют в первое промежуточное положение вдоль прямой, с которой совмещены точки подвеса конструкции в начальном и конечном ее положениях, затем конструкцию перемещают во второе промежуточное положение, в котором точка ее подвеса расположена над указанной прямой, после чего вдоль последней перемещают конструкцию до размещения ее над своим конеч- ным положением, а затем опускают конструкцию в указанное конечное положение.. .-....
Недостатками этого способа является то, что величина горизонтального перемещения конструкции из начального положения в конечное меньше двух максималы-ю-допустимых для заданной массы конструкции вылетов кранов на значение, тем большее, чем больше габариты конструкции в плане и минимальные паспортные вылеты кранов, т.к. расстояние между кранами не может быть меньше суммы их минимальных вылетов и габаритов (учитывается расстояние между точками стро- повки). Это не позволяет эффективно использовать грузоподъемность кранов и сужает эксплуатационные возможности способа. Невозможно, использовать краны с различными грузовысотными характеристиками (или их использование не эффективно), т.е. в этом случае величина максимального горизонтального перемещения конструкции из начального положения в конечное определяется краном с меньшими паспортными характеристиками; сложность обеспечения синхронной работы обоих кранов при перемещении конструкции на участке минимальных вылетов кранов, когда единичные перемещения в пределах одного цикла при такой же продолжительности включения механизмов по- йоротЬб или подъема стрел максимальны, но должны находиться в пределах расчётных и контролируемых величин. Поэтому перемещение конструкции между двумя кранами с этой точки зрения наиболее ответственно, в том числе с точки зрения вопросов безопасности. Учет вопросов безопасности требует выполнения дополнительных мероприятий, которые снижают эффективность использования кранов. Кроме того, учитывая взаимное влияние кранов друг на друга и возможность аварийной ситуации: перемещение конструкции между кранами (когда она находится максимально близко к кранам) ухудшает технику безопасности. Необходимо отметить, что уменьшение расстояния между кранами за счет
приближения точек строповки, во-первых, не всегда возможно по конструктивным особенностям перемещаемой конструкции, во- вторых, увеличивает взаимное влияние кранов друг на друга, в-третьих, такому
уменьшению препятствуют габариты конструкции.
Цель изобретения - повышение эффективности использования кранов.
Поставленная цель достигается тем, что
согласно способу перемещения подвешенной на связанной с двумя кранами траверсе конструкции, конструкцию из начального положения поднимают на определенную высоту, после чего ее поднимают в первое
промежуточное положение вдоль прямой, с которой совмещены точки подвеса конструкции в начальном и конечном ее положениях, затем конструкцию перемещают во второе промежуточное положение, в кото ром точка ее подвеса расположена над ука- занной прямой, после чего вдоль последней перемещают конструкцию до размещения ее над своим конечным положением, а затем опускают конструкцию в указанное конечное положение. Согласно изобретению из первого промежуточного положения конструкцию опускают в третье промежуточное положение, перемещая ее точку подвеса по дуге окружности с центром в одной из точек
подвеса траверсы до совмещения в плане точки подвеса конструкции с указанной точкой подвеса траверсы, после чего конструкцию перемещают горизонтально в четвертое промежуточное положение с возможностыо перемещения ее точки подвеса по дуге окружности с центром на перпендикулярной указанной прямой горизонтальной прямой, относительно которой симметрично расположены третье и четвертое промежуточные положения конструкции, затем конструкцию поднимают во второе промежуточное положение, перемещая ее точку подвеса по дуге окружности с центром в упомянутой точке подвеса траверсы.
Таким образом, по сравнению с прототипом заявляемое решение имеет следующие отличительные признаки:
перемещение двумя кранами ведут до
первого промежуточного положения, характер зуемого равенством веса конструкции и грузоподъемности первого крана на этом вылоте;
переводят (опускают вокруг точки под- весе траверсы на крюк первого крана) кон- струкцию в третье промежуточное положение, когда ее полный вес воспринимав ся первым краном, а точка подвеса конструкции совпала с указанной точкой;
перемещают конструкцию горизонталь- но в четвертое промежуточное положение с возможностью перемещения ее точки подвеса по дуге окружности с центром на пер- пенцикулярной линии перемещения прямой, относительно которой симметрии- но расположены третье и четвертое промежуточные положения, поворотом стрелы первого крана при ослабленных стропах второго плана;
выбирают слабину строповки второго крана, возвращают конструкцию в четвертое г сложение, когда ее полный вес воспри- нимэется обоими кранами, перемещая точк / подвеса конструкции по дуге окружности ( центром в точке подвеса траверсы.
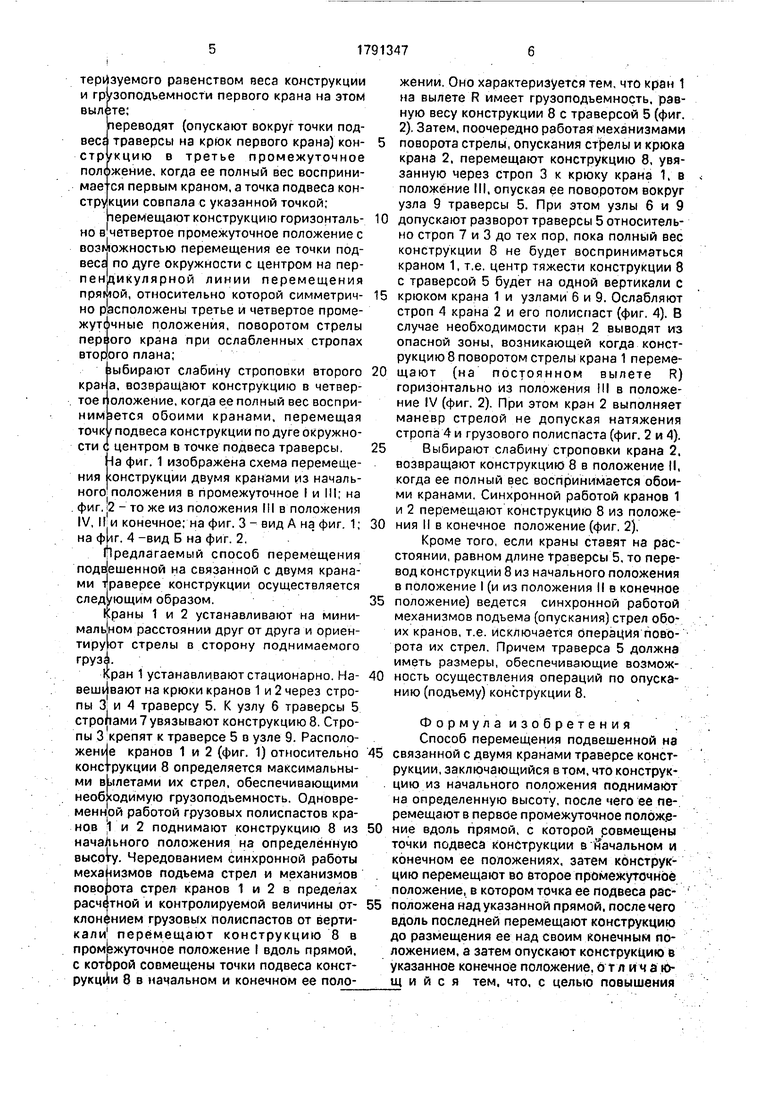
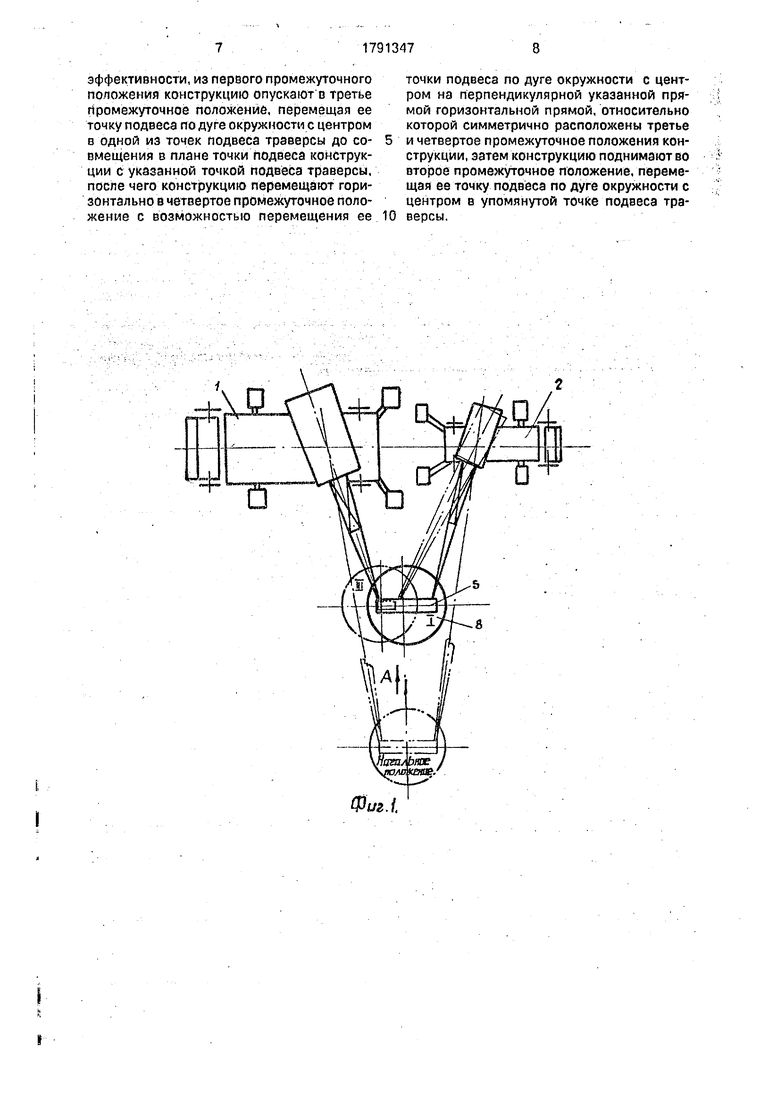
На фиг. 1 изображена схема перемещения сонструкции двумя кранами из начального положения в промежуточное I и III; на . фиг. |2 - то же из положения Ml в положения IV, Ги конечное; на фиг. 3 - вид А на фиг. 1; на фиг. 4-вид Б на фиг. 2.
Предлагаемый способ перемещения подвешенной на связанной с двумя кранами траверсе конструкции осуществляется след/ющим образом.
Краны 1 и 2 устанавливают на минимальном расстоянии друг от друга и ориентирует стрелы в сторону поднимаемого грузл.
Кран 1 устанавливают стационарно. На- вешйвают на крюки кранов 1 и 2 через стропы 3: и 4 траверсу 5. К узлу б траверсы 5 стропами 7 увязывают конструкцию 8. Стропы 3 крепят к траверсе 5 в узле 9. Располо- жени|е кранов 1 и 2 (фиг. 1) относительно конструкции 8 определяется максимальными в|ылетами их стрел, обеспечивающими необходимую грузоподъемность. Одновременной работой грузовых полиспастов кранов |Г и 2 поднимают конструкцию 8 из начального положения на определённую высоту. Чередованием синхронной работы меха шзмов подъема стрел и механизмов поворота стрел кранов 1 и 2 в пределах расчетной и контролируемой величины от- клонфнием грузовых полиспастов от вертикали перемещают конструкцию 8 в промежуточное положение I вдоль прямой, с которой совмещены точки подвеса конструкции 8 в начальном и конечном ее положении. Оно характеризуется тем, что кран 1 на вылете R имеет грузоподъемность, равную весу конструкции 8 с траверсой 5 (фиг. 2). Затем, поочередно работая механизмами поворота стрелы, опускания стрелы и крюка крана 2, перемещают конструкцию 8, увязанную через строп 3 к крюку крана 1, в положение III. опуская ее поворотом вокруг узла 9 траверсы 5. При этом узлы б и 9 допускают разворот траверсы 5 относительно строп 7 и 3 до тех пор, пока полный вес конструкции 8 не будет восприниматься краном 1, т.е. центр тяжести конструкции 8 с траверсой 5 будет на одной вертикали с крюком крана 1 и узлами 6 и 9. Ослабляют строп 4 крана 2 и его полиспаст (фиг. 4). В случае необходимости кран 2 выводят из опасной зоны, возникающей когда конструкцию 8 поворотом стрелы крана 1 перемещают (на постоянном вылете R) горизонтально из положения III в положение IV (фиг. 2). При этом кран 2 выполняет маневр стрелой не допуская натяжения стропа 4 и грузового полиспаста (фиг. 2 и 4).
Выбирают слабину строповки крана 2, возвращают конструкцию 8 в положение II, когда ее полный вес воспринимается обоими кранами. Синхронной работой кранов 1 и 2 перемещают конструкцию 8 из положения II в конечное положение (фиг. 2),
Кроме того, если краны ставят на расстоянии, равном длине траверсы 5, то перевод конструкции 8 из начального положения в положение I (и из положения II в конечное положение) ведется синхронной работой механизмов подъема (опускания) стрел обоих кранов, т.е. исключается операция поворота их стрел. Причем траверса 5 должна иметь размеры, обеспечивающие возможность осуществления операций по опусканию (подъему) конструкции 8.
Формула изобретения Способ перемещения подвешенной на связанной с двумя кранами траверсе конструкции, заключающийся в том. что конструкцию из начального положения поднимают на определенную высоту, после чего ее перемещают в первое промежуточное положение вдоль прямой, с которой совмещены точки подвеса конструкции в начальном и конечном ее положениях, затем конструкцию перемещают во второе промежуточное положение, в котором точка ее подвеса расположена над указанной прямой, после чего вдоль последней перемещают конструкцию до размещения ее над своим конечным положением, а затем опускают конструкцию в указанное конечное положение. 6 т л и ч a rout и и с я тем. что, с целью повышения
эффективности, из первого промежуточного положения конструкцию опускают в третье промежуточное положение, перемещая ее точку подвеса по дуге окружности с центром в одной из точек подвеса траверсы до совмещения в плане точки подвеса конструкции с указанной точкой подвеса траверсы, после чего конструкцию перемещают горизонтально в четвертое промежуточное положение с возможностью перемещения ее
0
точки подвеса по дуге окружности с центром на перпендикулярной указанной прямой горизонтальной прямой, относительно которой симметрично расположены третье и четвертое промежуточное положения конструкции, затем конструкцию поднимают во второе промежуточное положение, перемещая ее точку подвеса по дуге окружности с центром в упомянутой точке подвеса траверсы.
Редактор И.Павловская
. Фиг.4
Составитель А.Дашевская
Техред М.МоргенталКорректор Н.Кешеля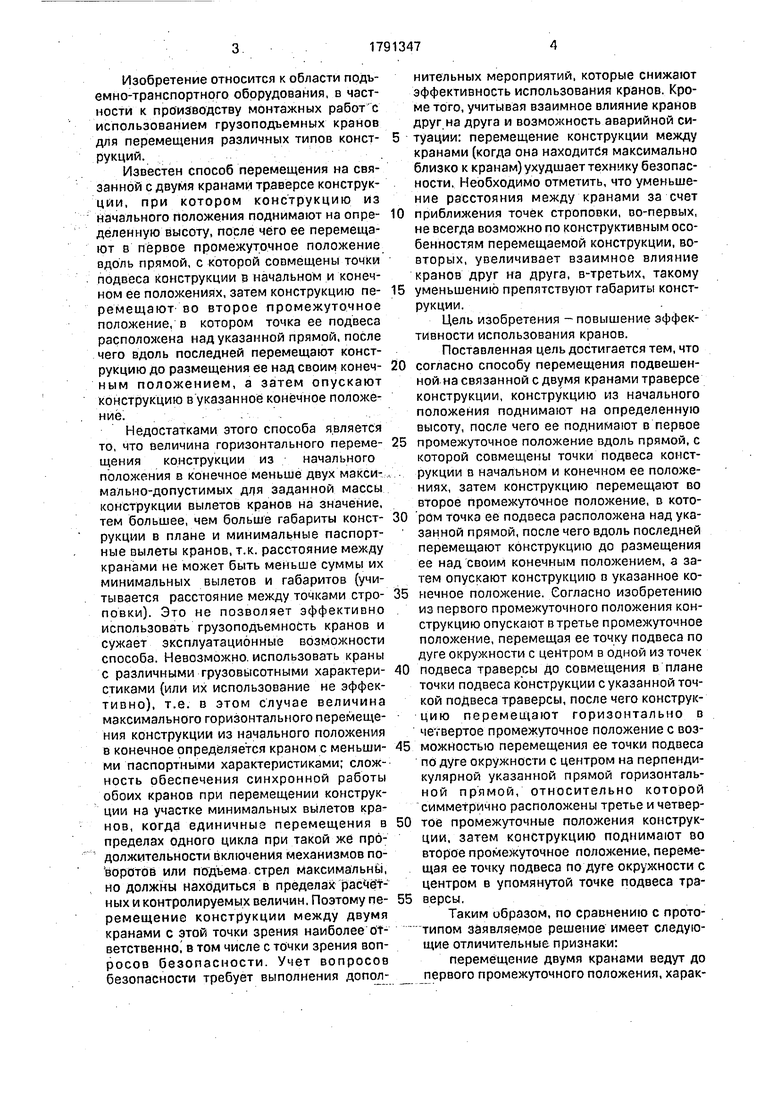
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ монтажа конструкции стреловым краном | 1986 |
|
SU1323530A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ГРУЗА ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ ГРУЗОПОДЪЕМНЫМ КРАНОМ МОСТОВОГО ТИПА | 2014 |
|
RU2564560C1 |
| Способ монтажа пространственных блоков покрытия | 1984 |
|
SU1294945A1 |
| Консольный кран для монтажа блоков | 1987 |
|
SU1602852A1 |
| Способ подъема длинномерной конструкции в вертикальное положение | 1984 |
|
SU1310333A1 |
| Грузозахватная траверса | 1983 |
|
SU1165627A2 |
| Устройство для расчаливания стрелы самоходного крана | 1986 |
|
SU1440859A1 |
| Способ перемещения конструкций двумя кранами | 1972 |
|
SU449879A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| Способ перемещения груза двумя кранами | 1981 |
|
SU998314A1 |
Использование: подъемно-транспортное оборудование. Сущность: на крюки кранов 1 и 2 через стропы 3 и 4 навешивают траверсу 5. К узлу 6 траверсы 5 увязывают бидА стропами 7 конструкцию 8. Из начального положения конструкцию 8 перемещают в промежуточное положение I, Поочередной работой механизмов крана 2 перемещают конструкцию 8 в положение III, опуская ее поворотом вокруг узла 9 траверсы 5 до тех пор, пока ее полый вес не будет восприниматься краном 1. Ослабляют строп 4 крана 2 и его полиспаст. Краны 1 и 2 выполняют маневр стрелами без натяжения стропа 4, перемещая конструкцию в четвертое промежуточное положение 8. Выбирают слабину строповки крана 2, возвращают конструкцию 8 во второе промежуточное положение. Синхронной работой кранов 1 и 2 перемещают конструкцию 8 в конечное положение. 4 ил. у Ё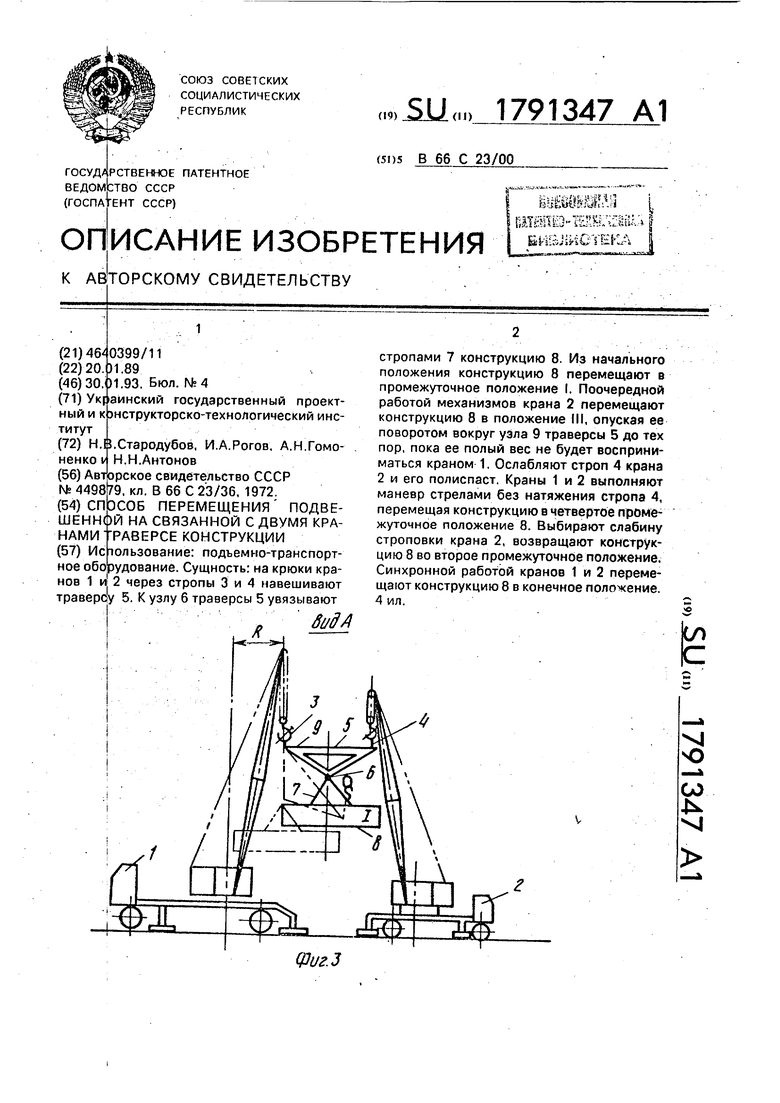
| Способ перемещения конструкций двумя кранами | 1972 |
|
SU449879A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
