Известно устройство для автоматического регулирования загрузки самоходного зе|рноуборочного комбайна по параметрам загрузки двигателя внутреннего сгорания (ДВС) ,и молотилки. Устройство состоит из источника электроэнергии, например. ДВС, элект1родвигателей привода молотилки и тягового выпрямителя, а также датчиков загрузки молотилки и ДВС.
Однако известное устройство не обеспечивает бесступенчатого изменения поступательной скорости комбайна и не предотвращает возможных перегрузок ДВС.
Предлагаемое устройство снабжено блоком управления, один из выходов которого подключен через датчик загрузки молотилки к статару асинхронного двигателя .привода молотилки, .второй - через датчик к ДВС, а выход - через вьгпрямитель к электродвигателю постоянного тока привода ходовой части.
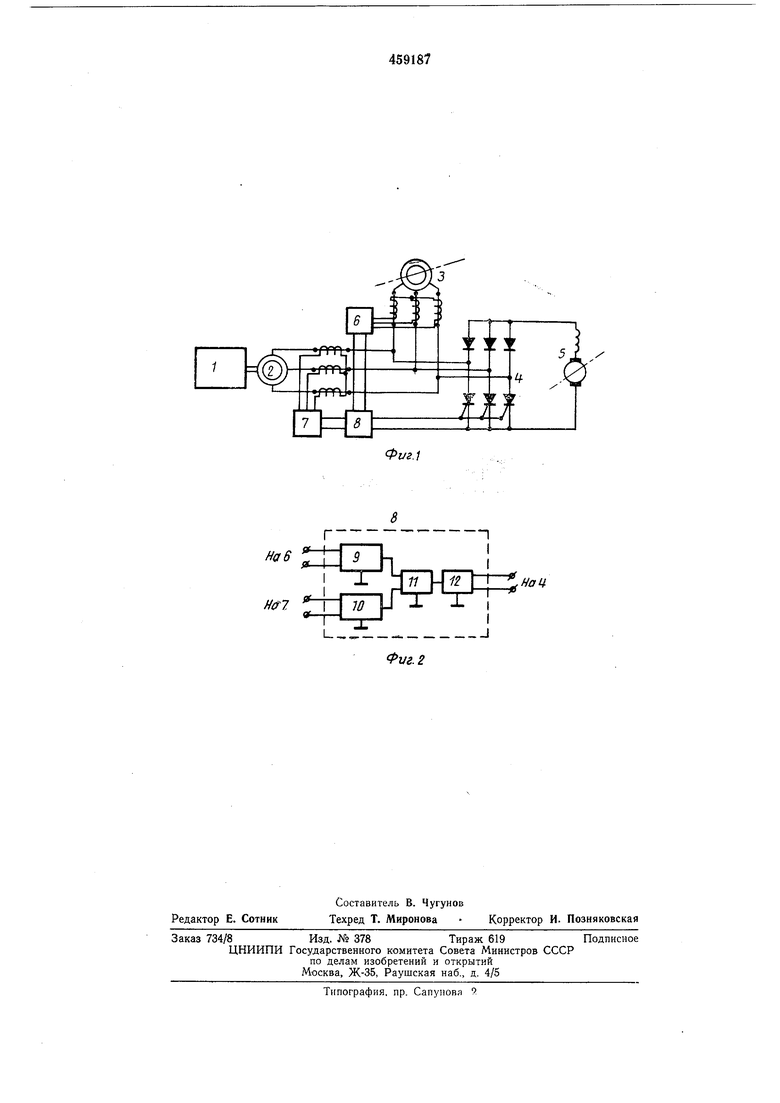
На фиг. 1 приведена схема предлагаемого устройства; на флг. 2 - схема блока управления.
Устройство содержит источник энергии, например дизельный двигатель 1, синхронный трехфазный генератор 2, трехфазный асинхронный электродвигатель 3 для привода молотилки, управляемый выпрямитель 4 с обратным диодом, тяговый электродвигатель 5,
датчик 6 загрузки молотилки, датчик 7 загрузки ДВС. Датчики -представляют собой соответственно датчики тока электродвигателя привода молотилки 3 и синхронного генератора 2, состоящие, например, из трех трансформаторов тока, т рехфазного выпрямителя и фильтра.
В блок 8 управления (фиг. 2) входят два несимметричных триггера 9 и 10, логический
элемент «ИЛИ-НЕ И .и выходной усилитель 12.
Составные элементы блока 9-12 управления могут быть выполнены, на.пример, на стандартных логических элементах серии «Логика Т-202, Т-101 и Т-403 (католог 073102-69).
Дизельный двигатель 1 механически соединен с трехфазным синхронным генератором 2, питающим асинхронный электродвигатель 3 привода молотилки и через управляемый выпрямитель 4 тяговый электродвигатель 5.
Асинхронный электродвигатель 3 рассчитан на максимальную (номинальную) мощность
привода молотилки, а мощность тягового электродвигателя 5 равна мощности синхронного генератора 2. Датчики 6 загрузки молотилки включен в цепь статора асинхронного электродвигателя 3 п соединен с блоком 8
управления. Датчик 7 запрузки ДВС входит 3 в общую цепь .синхронного генератора 2 и также связан с блоком 8 управления. Входы несимметричных триггеров 9 и 10 соединены соответственно с датчиком 6 и датчиком 7. Выходы несимметричных триггеров :вклю-5 чены через логический элемент «ИЛИ-НЕ 11 и усилитель 12 на управляющие электроды выпрямителя 4. Бели сигналы датчиков 6 и 7 (каждого в отдельности) по величине меньше уровня оп-Ю рокидывания несимметричных триггеров 9 и 10 или равны нулю, то благодаря логическому отррщанию «НЕ в тракте лрохождения сигналов на выходе усилителя 12 появится напряжение, которое откроет управ-15 ляемый выпрямитель 4. Есл,и сигнал любого из датчиков 6 или 7 по величине превысит .уровень опрокидывания несимметричных триггеров 9 или 10, то выходное напряжение усилителя 12 будет равно нулю и выпрямитель20 будет закрыт. Таким образом, блок 8 управления может либо полностью открыть выпрямитель 4, либо полностью закрыть его. Устройство обеспечивает загрузку молотилки до номинального значения крутящего мо-25 мента путем .изменения скорости движения комбайна, но не свыше допустимого его значения. При работе комбайна настройка регулятора ДВС ие изменяется и механически связанный30 с ним генератор 2 вращается с постоянной скоростью и вырабатывает электроэне|ргию практически постоянного напряжения и частоты. При полной (номинальной) загрузке моло-35 тилКИ асинхронный электродвигатель 3 потребляет мощность, необходимую для привода молотилки, а оставшаяся мощность генератора 2 используется на передвижение 1сомбайна. При увеличении (уменьшении) мо-40 мента сопротивления на валу молотилки от номинального значения, увеличивается (уменьшается) мощность, потребляемая асинХ|ронным электродвигателем 3 и соответственно увеличивается (уменьшается) его ток, фик-45 сируемый датчиком 6 загрузки молотилки. При увеличении сигнала датчика 6 выше уровня апрокидывания триггера 9, управляемый выпрямитель закроется, а при уменьшении сигнала - откроется, тем самым изменяя сред-50 нее 3|Начение напряжения на тяговом элек4тродвигателе 5, а следовательно, и скорость передвижения «омбайна таким образом, чтобы сохранялась неизменной загрузка молотилки. В случае перегрузки генератора 2, а соответственно и ДВС вступает в работу датчик 7 нагрузки ДВС, который через блок 8 управления закрывает управляемый выпрямиталь 4 до момента снятия перегрузки, изменяя рреднее значение напряжения на тяговом электродвигателе 5 и скорость движения комбайна так, что загрузка ДВС остается .постоянной на заданном уровне. В отдельных условиях эксплуатации комбайна (тяжелые условии движения и густой хлебостой) возможна одновременная работа обоих датчиков б и 7. При этом процесс регулиро;вания протекает аналогично описаяному выше, т. е. сигналы с датчиков 6 и 7 закроют управляемый выпрямитель 4 и т. д. В тяжелых условиях движения и редкол хлебостое может возникнуть противореча вая ситуация, в которой датчик 6 загрузки молотиЛКи Т|ребует увеличения скорости движения комбайна, а датчик 7 загрузки ДВС - уменьшения, но и в этом случае благодаря элементу «ИЛИ-НЕ управляемый вьшрямитель 4 закроется, а процессы регулирования будут протекать, как п в предыдущих случаях. Иредмет изобретения Устройство для автоматического регулиро-вания загрузки самоходного зерноуборочного комбайна, состоящее из источника электроэнергии, наприме|р двигателя внутреннего сгорання (ДВС), электродвигателей при-вода молотилки и тягового, выпрямителя, а также датчиков загрузки молотилки и ДВС, отличающееся тем, что, с целью бессту.пенчатого изменения поступательной скорости комбайна и исключения .перегрузки ДВС, оно снабжено блоком управления, один из выходов которого подключен через датчик загрузки молотилки к статору асинхронного двигателя привода молотилки, второй --- через датчик к ДВС, а выход - через выпрямитель к электродвигателю постоянного тока привода ходовой части.

На 6
На-7
L.,J НаЧ
