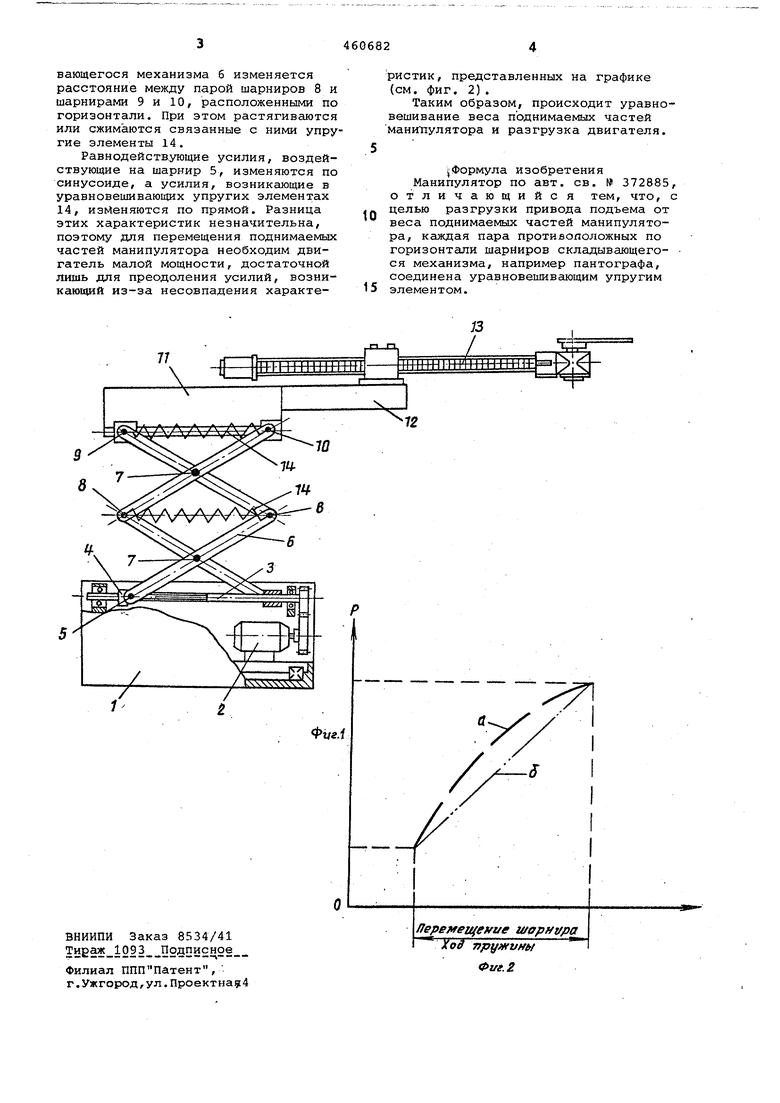
Изобретение относится к манипуляторам, предназначенным для работы в автоматическом цикле и в автоматических станочных линиях. Известен манипулятор, защищенный основиьгм авт. св. № 372885, Предлагаемьгй манипулятор отличается от известного тем, что каждая пара противопо.пожнь1х по горизонтали шарниров, соединяющих подвижные звенья складывающегося механизма, связана уравновешивающим упругим элементом, например пружиной растяжения. Это обеспечивает разгрузку привода подъема от веса поднимаемых частей манипулятора. На фиг. 1 представлен описываемый манипулятор, общий вид; на фиг. 2 график совмещенных нагрузочных характеристик уравновешивающих пружин и равнодействующих усилий в шарнирах соединяющих звенья складывающегося механизма. На фиг. 2 приняты условные обозначения: Р - нагрузка, кг а - нагрузочная характеристика равнодействующих уси.гшй в шарнирах звеньев складывающегося механизма; Ъ - нагрузочная характеристика уравн вешивающих пружин. Манипулятор содержит основание 1 с закрепленным на нем электродвигателем 2, который приводит во вращение ходовой винт 3, несущий подвижную гайку 4, соединенную с шарниром 5 складывающегося механизма 6, например пантографа, выполненного из подвижных звеньев, связанных между собой шарнирами 7 и 8. Шарнирами 9 и 10 складывающийся механизм 6 соединен с неподвижным корпусом 11, по которому перемещается подвижный корпус 12 с рукой 13. Противоположные по горизонтали шарниры 8, 9 и 10 соединены упругими элементами 14, например пружинами растяжения. Подъем и опускание складывающегося механизма б происходят следующим образом. При вк.пючении электродвигателя 2 ходовой винт 3, вращаясь, перемещает гайку 4 и связанный с ней шарнир 5, который, перемещаясь, задает движение звеньям складывающегося механизма 6 и обеспечивает перемещение в вертикальной плоскости закрепленного на складывающемся механизме 6 неподвижного корпуса 11 несущего подвижный корпус 12 с ру;Кой 13. При движении звеньев склаДыБающегося механизма 6 изменяется расстояние между парой шарниров 8 и шарнирами 9 и 10, расположенными по горизонтали. При этом растягиваются или сжимаются связанные с ними упругие элементы 14.
Равнодейств,ующие усилия, воздействующие на шарнир 5, изменяются по синусоиде, а усилия, возникающие в уравновешивающих упругих элементах 14, изменяются по прямой. Разница этих характеристик незначительна, поэтому для перемещения поднимаемых частей манипулятора необходим двигатель малой мощности, достаточной лишь для преодоления усилий, возникающий из-за несовпадения характеристик, представленных на графике (см. фиг. 2).
Таким образом, происходит уравновешивание веса поднимаемых частей манипулятора и разгрузка двигателя.
Формула изобретения Манипулятор по авт. св. № 372885, отличающийся тем, что, с целью разгрузки привода подъема от веса поднимаемых частей манипулятора, каждая пара противоположных по горизонтали шарниров складывающего- ся механизма, например пантографа, соединена уравновешивающим упругим элементом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1278201A1 |
| Уравновешенный манипулятор | 1988 |
|
SU1521579A1 |
| УСТРОЙСТВО ПОДВЕСКИ ТОКОПРИЕМНИКА | 2000 |
|
RU2199449C2 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2705824C1 |
| Манипулятор, работающий в герметизированном объёме | 2018 |
|
RU2691169C1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| Манипулятор | 1988 |
|
SU1549747A1 |
| Манипулятор | 1984 |
|
SU1284822A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1985 |
|
SU1301529A2 |
.f
