Изобретение относится к подъемно-транспортному машиностроению, а именно к манипуляторам с ручным у11равлением. Известен манипулятор, содержащий Hiapнирный нантограф. пружинный уравновешивающий механизм которого связан одним концом с основным звеном пантографа, а другим через гибкий э;1емент, нроходяший через систему укрепленных на каретке вертикального неремешения блоков, - с кронштейном, жестко связанным с основным звеном пантографа 1. Недостатком известного манипулятора является сложность уравновещивания его конструкции, так как пружину растяжения уравновешивающего механизма приходится сопрягать с гибким элементом, который через систему блоков уже крепится к кронштейну основного звена панто1рафа. При этом необходимо иметь две пружины, которые должны располагаться симметрично по обе стороны основного звена. Возможна также вытяжка упругих элементов. Наиболее близким к изобретению является манипулятор, содержащий поворотный корпус с установленной на нем стрелой, вынолненной в виде механизма, пантографа, схват и основной привод, смонтированный на поворотном корпусе, снабженном вертикальными направляющими, в которых установлена каретка, связанная с уравновещивающим механизмом, который, в свою очередь, через тягу с рычагом щарнирно сочлеиен с основным звеном пантографа и с плечом, имеющим на конпе каток, расположенный R горизонтальных 1 аправлйющ,их 2 Недостатком известного маьгипулятора является малая rpy3ono;i-bc:viiocTij. Целью настоящего изобретения, являетс:я 1овыщение грузоподъемности с одчювременным у-тучшением УСЛОВИЙ работь: опе ратора. Поставлепная цель достига ,сч тем, что .манипулятор, содержащий поворотный корпус с установленной на не.м стрелой, выпол:.синой в виде механизма пантографа, схват и основной привод, смонтированпый на 1Юворотном корпусе, С15абженном вертикальными направляющими, в которых установлена каретка, связанная с уравновещизаюrUfiK механизмом, который, в свою очередь, через тягу с рычагом щарнирно сочленен с ocHOBi-iijiM звеном пантографа и с 1тлечсМ, имеющим на конце каток, расположенный в гсризонтальных .напраз.;1яюи1.их, снабжен дополнительным приводом, имеющим реечную , установленным на поворотном корпусе и связанным с осью катка, дополнительными тягами, 1нарнирно соединенными между собой и образующими с основным звеном пантографа и кареткой вертикальHjro неремещения параллелограмм, с верп:ипой которого соедиь:еп уравновещивающии механизм, связанный щарнирно посредством дополнительно введенной вилки с рычагом. На фиг. 1 схематически изображен предлагаемый манипулятор, общий вид; на фиг. 2поворотный корпус манипулятора; на фиг. 3разрез А----А на фиг. 2. Манипулятор содержит поворотный корпус 1, установленную на нем стрелу, выполненную в виде пантографа, состоящую из плеча 2 и руки 3. Головка схвата 4, несущая крюковую подвеску, установлена на руке 3, сочлененной с плечом 2 и основным звеном о пантографа. На поворотном корпусе 1 установлен основной привод 6, связанный с кареткой 7, расположенной в вертикальных направляющих, выполненных на поворотном корпусе. Н.чечо 2 через ось 8 соединено с катком 9, который с помощью реечной тяги 10 связан с дополнительным приводом 1, установленным на поворотном корпусе 1. Ось 8 также связана с рычагом 12, который посредством оси 13 сопрягается е основным звеtiOM 5 пантографа, а госредством осей 14 и вилки 15 -- со стержнем 16, имеющим на конце резьбу с гайкой 17. На стержне 6 смонтирована втулка 18, которая установлена с воз.можностью перемещения в качающейся платформе 19. На втулке 18 расположен набор тарельчатых пружин 20, которые с одной стороны упираются в платформу 19, а с другой стороны через шайбу 21 и втулку 18 - в гайку 17. Платформа 19 находится в верщине С параллельграмма BCDE, который образован корпусом каретки 7 вертикального перемещения, доцолнительн.ыми тягами 22 и 23 и частью основноio звена 5 пантографа. Втулка 18 с пружинами 20 и с размед,енными в ней стержнем 16 с вилкой 15, а также п;1атформа 19 представляют собой уравновещиваюн1ий механизм манипулятора. .1анипулято;; работает следующим образом. При |1аладке маниггулятора для уравновешивания собствен1 ого веса все.х тяг, рычагов, плеча и руки необходимо отрегулировать нружинный блок. Для этого достаточно, поворачивая гайку 17 в ту или иную сторону, найти равновесное положение тяг и рычагов, дости1ае.мое за счет соответствующего усилия, развиваемого набором тарельчатых 20. Нри перемещении крюковой Г1одвески, установленной на головке схвата 4, с подвегченным к ней грузом в радиальном направлении (каретка 7 в этом случае заторможена), груз перемещается строго горизонтально, т. е. положение его центра тяжести не изменяется по вертикали. При этих перемещениях рука 3, плечо 2, тяги и рычаги, находящиеся внутри них, совершают плоскопараллельное движение и происходит изменение положения центра тяжести всей этой системы по вертикали. Поэтому, если бы не было пружинного уравновешивающего механизма, то приходилось бы совершать дополнительную работу по перемещению центра тяжести всей системы рычажного параллелограмма по вертикали, значит, увеличивать мощность привода, предназначенного для радиального перемещения. Когда рука манипулятора находится в вертикальном положении, рычаг 12 тоже занимает вертикальное положение. Весь механизм пантографа находится в положении неустойчивого равновесия и усилие от действия блока пружин проходит через ось ГЗ (точка Д). В любом положении радиального перемещения рычаг 12 поворачивается относительно оси 13 и через ось 14 и вилку 15 воздействует на стержень 16, который вместе со втулкой 18 начинает вытягиваться из качающейся платформы 19. Пружины 20 сжимаются, усилие от их действия увеличивается, в то же время возникает плечо меж ду направлением действия усилия пружин и осью 13. Создается момент от действия усилия пружин, который стремится возвратить рычаг 12 в вертикальное положение. Таким образом, использование предложенного манипулятора позволяет повысить грузоподъемность с одновременным улучшением условий работы оператора.
r: ,4.
EJi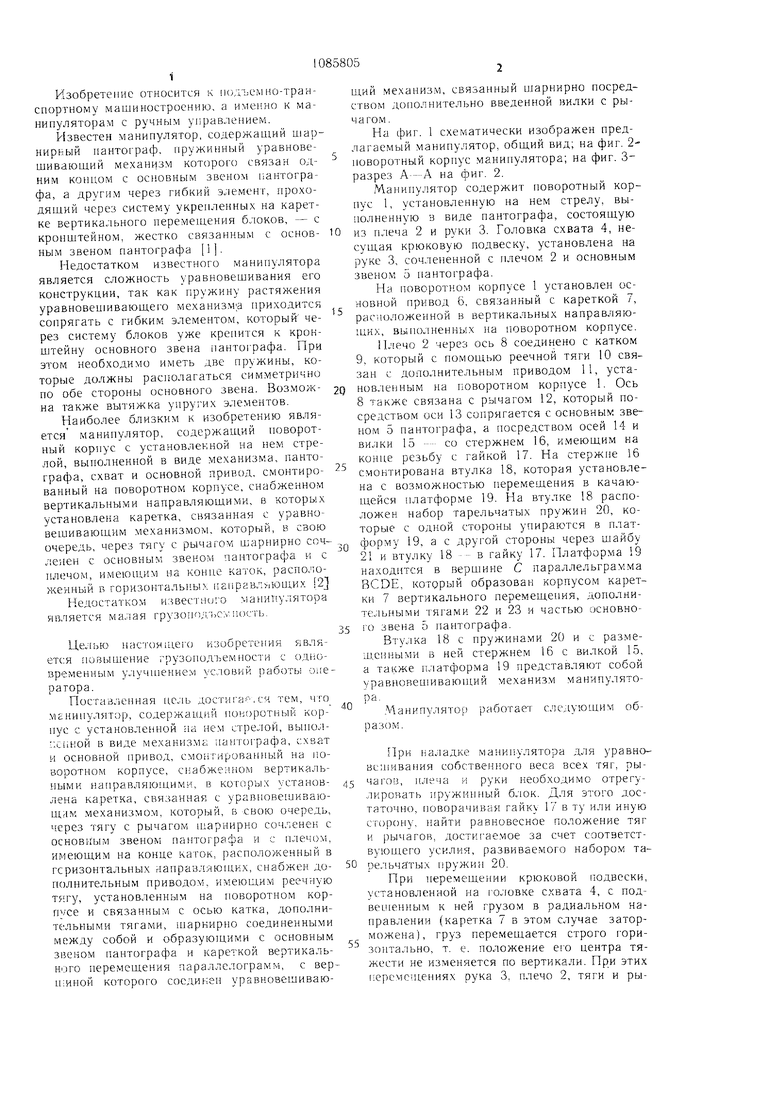

| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| ПОГРУЗЧИК "ПРЯМАЯ ЛОПАТА" | 1993 |
|
RU2081052C1 |
| Манипулятор | 1982 |
|
SU1049414A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Манипулятор | 1980 |
|
SU935450A2 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
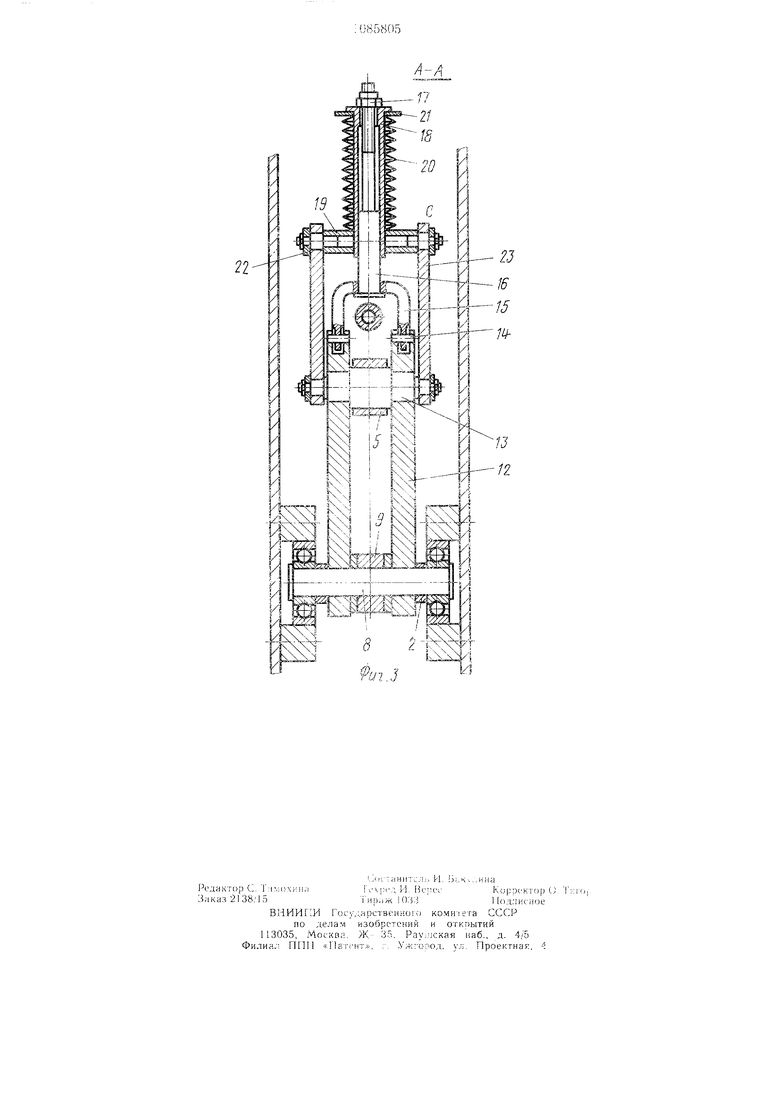
МАНИПУЛЯТОР, содержащий поворотный корпус с установленной на нем стрелой, выполненной в виде механизма пантографа, схват и основной привод, смонтированный на поворотном корпусе, снабженном вертикальными направляющими, в которых установлена каретка, связанная с уравновещиваюш.им механизмом, который, в свою очередь, через тягу с рычагом luapнирпо сочленен с основным звеном пантографа и с плечом, имеющим на конце каток, расположЛ1ный в горизонтальны.х направnHiOLiuix, отличаюш.ийся тем, что, с целью повышения грузоподъемности с одновременным улучшением условий работы оператора, он снабжен дополнительным приводом, и.меющим реечную тягу, установленным на поворотном корпусе и связанным с осью катка, дополнительными тягами, шарнирно соедииеннь1ми между собой и образующи.ми с основным звено.м пантографа и кареткой вертикального перемещения парал,;1елограл-м., с верщиной которого соединен уравSS новешивающий механизм, связанный шарнирно посредством дополнительно введенниой вилки с рычагом. оо ел оо о О1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Урановешенный манипулятор | 1979 |
|
SU848350A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Мишкинд С | |||
| И | |||
| Манипуляторы с ручным управлением и автоматической балансировкой груза для машиностроения | |||
| Обзор., М., НИИмаш, 1981, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
