Изобретенпе относится к области измерительной техипки, а пменно к устройствам для высокоточного пзмерепня линейных перемещений.
Известпы устройства для измерения лпиеймых .перемещений, соде;ржащие два пдентпчпых преобразователя, осуществляющих преобразование змеряемого перемещения в электрический сигнал, .выходы которых подключены к вычитающему устройству, и блок управлепия.
Предлагаемое автокорректпрующееся устройство для измереппя лппейпых пере.мещепий отличается тем, что оно спабжепо дву.мя источниками образцовых приращений измеряемой величины, выходы которых подключены через ко.ммутаторы к в.ходам преобразователей, двумя блоками иамятн и блоком делеппя. При это.м выходы обоих блоков памяти лодсоединепы к входу блока вычитайия, выходы которого через коммутаторы подключены к входам блоков па.мяти и одному из входов блока деления. Второй вход блока делеи.ия связап с выходом одного из блоков памяти.
Это позволяет повыспть точпость пзмерення линейиых перемеи епий путем устранения влияния дополпптельпых погрешностей, пелинеЙ1гостп выходной ха актеристики п самопроизвольного дрейфа параметров элемегггов устройства.
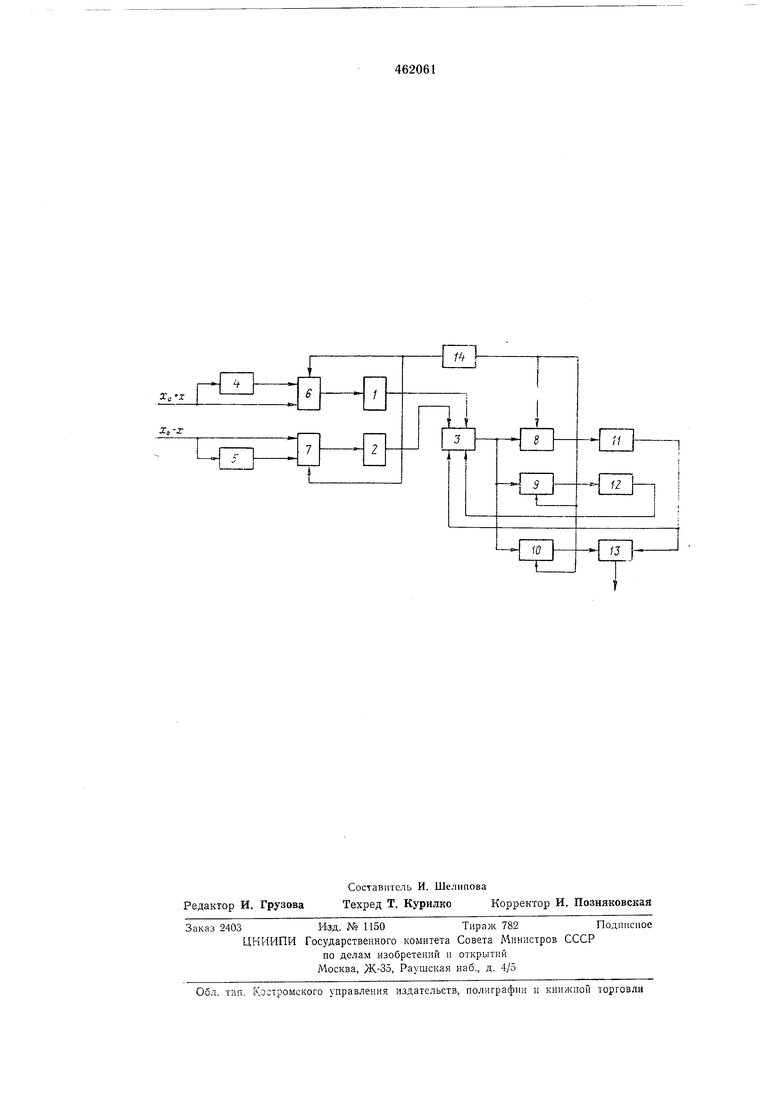
Структурная схе.ма предлагаемого устройства представлена на чертеже.
Оно содержит идентичные преобразователи 1 п 2 пере.мещенпя в электрпческий сигнал, блок 3 вычитания, источники 4 и 5 образцовых приращений из.меряе.мой величины, кол мутаторы 6-10, блоки 11 п 12-па.мяти, блок 13 деления, блок 14 управления.
Источники 4 п 5 образцовых приращений через ком.мутаторы 6 п 7 нодсое.дпнеиы к входам идентичных преобразователей 1 и 2. Выходы преобразователей соедииены с блоко.м 3 вычитания, выход иоследпего через коммутаторы 8 и 9 -с блоками 11 и 12 па.мятп, а коммутатор 10 - с первы.м входом блока 13 деления.
Выход блока 12 па.мяти подключен к входу блока 3 вычитания, а выход блока 11 памяти - к входу блока вычитания и к второму входу блока деления.
Ком.мутаторы 6-10 соединены с блоко.м 14 упра.влення.
стройство работает следующи.м образом.
Бходиые величины .o+,v п ло-.v одиовре.меиио поступают через ко.ммутаторы 6 п 7 на в.ход идентичных преобразователей 1 и 2. выходные сигиалы которых подаются иа блок 3 вычитания. Через открытый блоком управлеипя коммутатор 8 результат вычитания поступает в блок 11 памяти. В это время ком.мутаторы 9 II 10 закрыты. Таким образом, в блоке памяти залисывается величина
Af,-Л2(4а;со+26)л ,
где NI и NZ - выходные сигналы преобразователей; а м b - параметры функции иреобразования.
Затем блок управления переводит коммутаторы 6 и 7 в положение, при котором к входам преобразователей подключаются источники образцовых приращений нзмеряемой величины. Теперь на вход преобразователей подаются соответственно величины .T-J-(x-f-A) и (х+А.
Выходные сигналы .Vs и .4 преобразователей связаны с входны ми велнчииами соотношениями
.Ч(Хо + (Хо+Х + )+С,
. N а(лго-.V-Д)2+Ь (хо-.г-Л) +с, где с- также параметр фуикции преобразования.
Снгиалы NZ и ;V4 постунают на блок вычитания, а. с его выхода через коммутатор 9, открытый блоком уцравления, в блок 12 памятн. В это время коммутаторы 8 и 10 закрыты.
Таким образом в блоке 12 иамяти запоминается величина
A.,,,V4(4o,Vo-f2fc)(,v-|-A).
Выходные сигналы блоков намятн вновь иодаются на блок вычитания, на выходе которого формнруется сигнал, равный
(-V,-;V2)-(A3-A,) (4йХо+26)Д. Указанный сигнал через открытый блоком управления коммзтатор 10 ноступает в качестве делителя на вход блока деления. На второй вход блока деления в качестве делимого проходит величииа
Л ,-Л2(4ал;о+2Ь)-А. ИЗ блока иамяти.
В результате деления на выходе блока дслепия Получается результат змере11ия AI-.VZ л
(Л ,-.2)-()
Как видно из последнего выражения, результат измерения искомого неремеидения X
не зависит от параметров а, Ь, с, XQ, т. е. не зависит от изменения чувствительности, дрейфа нуля, нелинейности функции преобразования и от стабильности начального значеиия Л-Q
измеряемой величины.
Предлагаемое устройство дает возможность получить точность на несколько порядков выше, чем известные, причем в широком дианазоне внешних условий. Оно может быть реализоваНО на базе различных преобразователей: иотеициометрическнх, емкостных, индуктивных. Точность этих устройств зависит только от точности величины Л, которая может быть реализована практически с любой требуемой точностью.
|П р е д м е т изобретения
Устройство для измерения линейных перемещений, содержащее преобразователи перемещения в электрический сигнал, выходы которых подключены к первым двум входам блока вычитания, и блок управления, отличающееся тем, что, с целью иовышения точности
измерения, оно содержит блоки памяти, блок деления, коммутаторы и источники образцовых приращеинй измеряемой величины, входы которых подключены к входам устройства и к первым .входам первого и второго коммутаторов, вторые входы коммутаторов соединены с выходами источи.иков образцовых приращении нзмеряе.мой величины, а выходы упомянутых коммутаторов связаны с входами преобразователей неремещений в электрический сигнал,
вы.ходы блока вычитания через третий, четвертый и пятый ком.мутаторы -подключены соответственно к входам блоков памяти и одному из входов блока делення, другой вход которого соедннен с выходом первого блока памяти,
выходы .блоков памяти подключены к двум другим входам блоков вычитания, а управля1ош.пе входы коммутаторов соединены с выхода мн блока управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения линейных перемещений | 1979 |
|
SU861926A2 |
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода постоянного тока | 1984 |
|
SU1277333A1 |
| Устройство для автоматического управления поливом | 1986 |
|
SU1340665A1 |
| Система управления судовым главным двигателем и винтом регулируемого шага | 1975 |
|
SU575268A1 |
| Динамическое запоминающее устройство с зонами свободной памяти | 1982 |
|
SU1101894A1 |
| Устройство для отображения информации | 1974 |
|
SU729607A1 |
| Устройство для отображения информации | 1986 |
|
SU1388941A1 |
| Устройство для вычисления значений координат вектора | 1976 |
|
SU591860A1 |
| УСТРОЙСТВО для ПРОСТРАНСТВЕННО-ВРЕМЕННОГО СЕЙСМИЧЕСКОГО АНАЛИЗА | 1973 |
|
SU393742A1 |
| УНИВЕРСАЛЬНОЕ ГИБРИДНОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО | 1971 |
|
SU311283A1 |