Изобретение относится к вычислительной технике. Известно устройство для вычисления значений координат вектора, работающее в соответствии с алгоритмом Волдера. Оно содержит два входных регистра, блок управления, сумматоры-вычитатели, элементы корректировки содержимого регис7ров 1. Данное, устройство действует с низкой точностью. Наиболее близко к предлагаемому устрой стБО для вычисления значений координат вектора, содержаш,ее четыре сдвигающих регистра, три сумматора-вычитателя, два коммутатора и блок постоянной памяти, причем группа выходов первого сдвигающего регистра через первый коммутатор соединена с первым входом первого сумматора-вычитателя, группа выходов второго сдвигающего регистра через второй коммутатор подключена к первому входу второго сумматора-вычитателя, выход которого соединен с первым выходом устройства и входом первого сдвигающего регистра, выход младшего разряда которого соединен со вторым входом второго сумматора-вычитателя. Выход младщего разряда второго сдвигающего регистра соединен со вторым входом первого сумматора-вычитателя, выход которого подключен ко входу второго сдвигающего регистра и ко второму выходу устройства. Первый вход третьего сумматора-вычитателя соединен с выходом третьего сдвигающего регистра, второй вход - с выходом четвертого сдвигающего регистра, выход подключен к третьему выходу устройства и ко входу третьего сдвигающего регистра. Выходы блока постоянной памяти соединены с соответствующими входами четвертого сдвигающего регистра. Вычисления в устройстве выполняются по итерационному алгоритму Волдера. Аппаратурная реализация алгоритма проста, позволяет распараллеливать выполнение микроопераций, приблизительно на порядок повыщает быстродействие и сокращает объем програм.м по сравнению с ЭВМ универсального типа. Недостатком рассматриваемого устройства является необходимость хранения в блоке па.мяти значений угловых постоянных, число которых равно разрядности операндов, что повышает затраты на оборудование. Цель изобретения - сокращение объема оборудования. Предлагаемое устройство отличается тем, что в него введен элемент И, первый вход которого подключен ко входу устройства, второй вход соединен с соответствующим выходом четвертого сдвигающего регистра, вход которого соединен с выходом элемента И.
При достаточно малых углах тригонометрические функции численно равны значению угла, а следовательно и пропорциональны ему Поэтому на.итерациях, номер которых не меньше семи, углы поворота вектора уменьшаются ровно вдвое. Объем намяти сокращается благодаря тому, что угловые расстояния, начиная с седьмой итерации, получаются сдвигом на один разряд угловой постоянной предыдущей итерации.
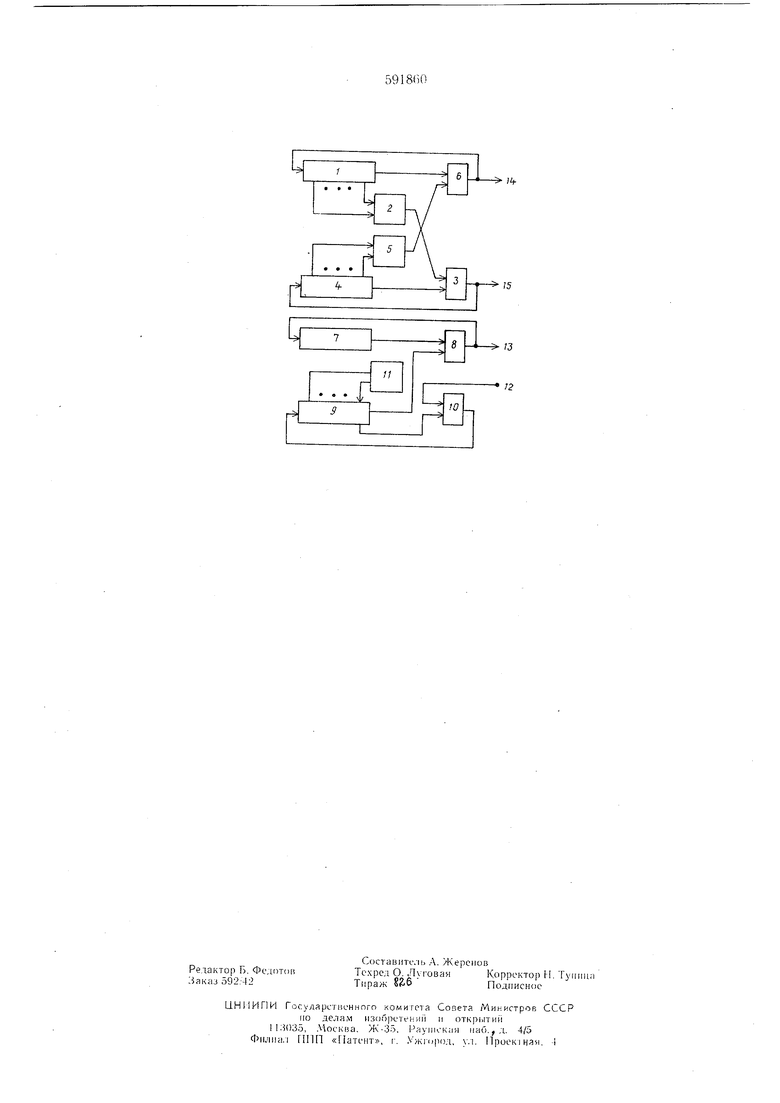
На чертеже показана структурная электрическая схема устройства.
Устройство содержит сдвигающий регистр 1, ком.мутатор 2, сумматор-вычитатель 3, сдвигающий регистр 4, коммутатор 5, сумматорвычитатель 6, сдвигающий регистр 7, сумматор-вычнтатель 8, сдвигающий регистр 9, элемент И 10, блок 11 постоянной намяти.
Устройство работает по алгоритму Волдера с той разницей-, что, начиная с седьмой итерации, угловая, постоянная не заносится в сдвигающий регистр 9 из блока 11 постоянной намяти каждой итерацией, а вычисляется на предыдущей итерации сдвигом.
Устройство работает следующим образом. Координаты и угол хранятся в регистрах 1, 4 и 7 соответственно. Если выполняется одна из первых итераций, в регистр 9 заносится из блока 11 угловая постоянная. Если выпо.чняется итерация, номер которой не меньще семи, угловая постоянная сформирована на предыдущей итерации, и ее занесение не требуется. Кроме того, при выполнении этих итераций из устройства управления (на чертеже не ноказано) на вход 12 подается потенциал, открывающий эле.мент И 10.
С начало.м очередной итерации:
по команде из устройства управления коммутаторы 2, 5 соединяют соответствующие входы регистров 1 и 4 со входа.ми сумматоров-вычитателей 3, 6.
Значение со сдвигающего регистра 1 подается на второй вход сумматора-вычитателя 6, где складывается (вычитается) со значением, ноступающим с ко.ммутатора 2. Значение, получаемое на выходе сум.матора-вычитателя 3, записывается в регистр 4.
Значение со сдвигающего регистра 7 подается на сумматор-вычитатель 8, где вычитается (складывается) с угловой постоянной, ноступающей со сдвигающего регистра 9 на второй вход сумматора-вычитателя 8. Значение, получаемое на выходе су.мматора-вычитателя 8, записывается в регистр 7 и через выход 13 поступает в устройство управления.
На первых щести итерациях элемент И 10 закрыт, и в процессе сдвига угловой постоянной регистр 9 счищается, тем самым подготав ливаясь к приему угловой постоянной из блока 11.
На последующих итерациях на вход 12 из устройства управления подается потенциал, открывающий элемент И 10. В этом случае с предпоследнего разряда сдвигающего регистра 9 значение через элемент И 10 записывается в регистр 9.
Процесс новторяется до набора заданного числа итераций.
В конце операции результаты вычислений могут быть выведены соответственно с выходов 14. 15 и 13.
Использование элемента И позволяет в несколько раз сократить объем памяти, необходимый для хранения значений угловых постоянных. Например, число хранимых в памяти угловых постоянных сокращается втрое при разрядности операндов, равной 21.
Формула изобретения
Устройство для вычисления значений координат вектора, содержащее четыре сдвигающих регистра, три су.мматора-вычитателя, два
5 ком.мутатора и блок постоянной памяти, приче,м группа выходов первого сдвигающего регистра через первый коммутатор соединена с первым входом первого сумматора-вычитателя, группа выходов второго слзигающего регистд ра, через второй коммутатор подключена к перво.му входу второго су.м.матора-вычитателя, В1з1ход которого соединен с первым выходом устройства и в.ходом первого сдвигающего регистра, выход младшего разряда которого соединен со вторым входом второго сумматора5 вычитателя, выход младшего разряда второго сдвигающего регистра соединен со вторым входом первого сумматора-вычитателя, выход которого подключен ко входу второго сдвигающего регистра и ко второму выходу устройства, первый вход третьего сумматора-вычитателя соединен с выходом т-ретьего сдвигающего регистра, второй вход - с выходом четвертого сдвигающего регистра, выход подключен к треаъему выходу устройства и ко входу третьего сдвигающего регистра, выходы блока
5 постоянной памяти соединены с соответствующими входами четвертого сдвигающего регистра, отличающееся тем, что, с целью сокращения объема оборудования, оно содержит элемент И, первый вход которого подключен ко входу устройства, второй вход соединен с соответствующи.м выходом четвертого сдвигающего регистра, вход которого соединен с выходом элемента И.
Источники информации, принятые во вни.мание при экспертизе:
1. Опубликованная заявка Великобритании Л« 1331410, кл. G 4 А. М. кл. G Об F 1/02 1973.
/5
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой преобразователь координат | 1981 |
|
SU1076903A1 |
| Устройство для преобразования координат | 1977 |
|
SU660055A2 |
| Арифметическое устройство | 1978 |
|
SU750483A1 |
| Устройство для вычисления тангенса | 1975 |
|
SU650073A1 |
| Устройство для вычисления элементарных функций по алгоритму Волдера | 1982 |
|
SU1068933A1 |
| Устройство для реализации алгоритма Волдера | 1983 |
|
SU1115049A1 |
| Арифметическое устройство | 1978 |
|
SU746508A1 |
| Устройство для реализации алгоритмаВОлдЕРА | 1978 |
|
SU813421A1 |
| Цифровое устройство для вычисления синусно-косинусных функций | 1980 |
|
SU868753A1 |
| Устройство для преобразованияКООРдиНАТ | 1979 |
|
SU836636A1 |