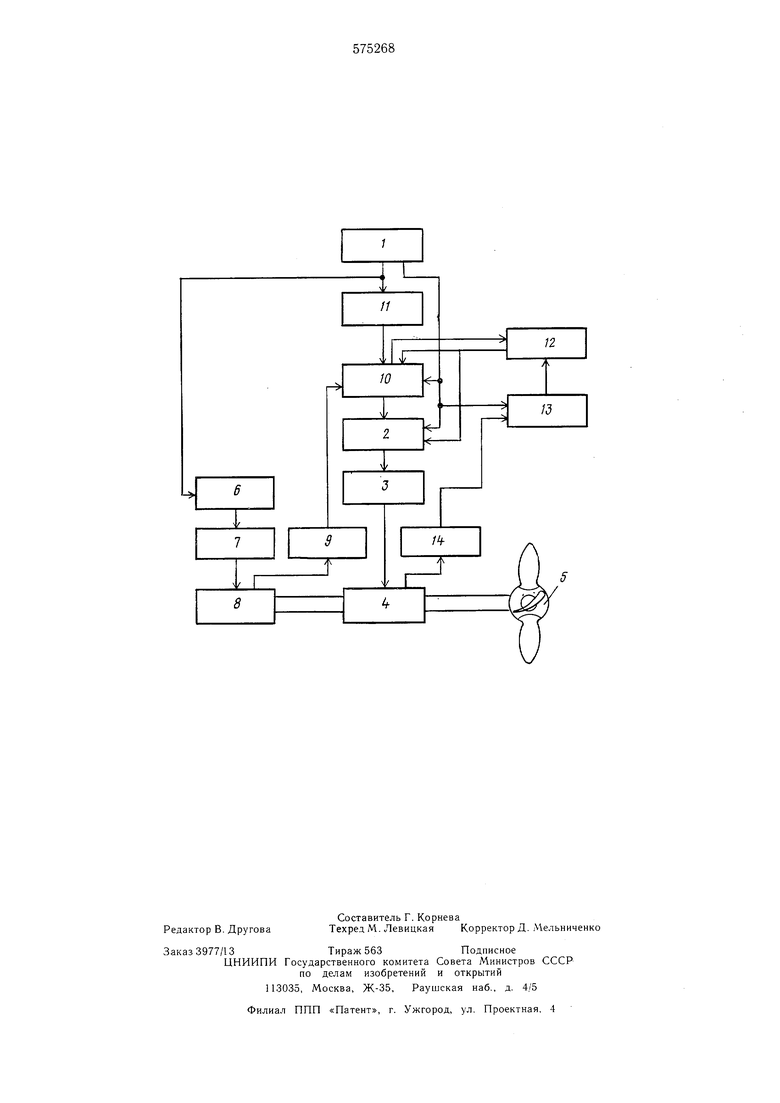
Изобретение касается автоматизации управления судовыми силовыми установками. Известна система управления судовой энергетической установкой, содержащая задатчик оборотов двигателя, задатчик шага винта, следящий блок управления шагом винта, регулятор оборотов, а также корректор шага винта 1. В известной системе при сильном волнении на режиме полного хода имеет место взаимодействие регулятора оборотов и корректора шага, что обеспечивает оптимальный режим работы двигателя. Однако система обладает малым быстродействием из-за наличия в ней инерционных узлов. Известна также система управления судовым главным двигателем и винтом регулируемого шага, содержащая блок задания режимов работы, связанный через программый блок, регулятар нагрузки, коммутатор, соединенный одним из входов непосредственно с выходом блока задания режимов, и исполнительный механизм винта регулируемого шага с механизмом изменения шага винта с- датчиком шага и через исполнительный механизм двигателя - с регулятором оборотов двигателя, снабженного датчиком нагрузки, выход которого соединен с одним 13 входов регулятора нагрузки 2. Недостатками известной системы являются отсутствие автономных цепей воздействия на исполнительный механизм винта и наличие обратной связи по защите от перегрузки через главный двигатель, которые приводят к недостаточному быстродействию и надежности системы. Цель изобретения - повышение надежности системы. Эта цель достигается тем, что система снабжена блоком сравнения заданного и истинного значений шага винта и блоком памяти, причем выход блока сравнения связан с одним из входов блока памяти, другой вход которого соединен с выходом элемента сравнения регулятора нагрузки, а выход - с одним из входов регулятора нагрузки и одним из входов коммутатора. На чертеже изображена функциональная схема системы. Система содержит блок 1 задания режимов работы, связанный одним из своих выходов с одним из входов коммутатора 2, выход которбго через исполнительный механизм 3 связан с механизмом 4 изменения шага винта 5. Другой выход блока 1 связан через исполнительный механизм б с регулятором 7 оборотов двигателя 8, снаряженного датчиком 9 нагрузки, напримео, по крутящему моменту, выход которого подключен к олному из входов регуг лятора 10 нагрузки, подключенного своим выт ходом к ОДНОМУ из входов коммутатора 2, а другими своими входами - соответственно к выходу программного блока II, вход которого подключен к выходу блока задания режим ой работы, к другому выходу блока 1 и к выхо|ду блока 12 памяти, один из входов которогф подключен к выходу элемента сравнения регуг лятора 10 нагрузки, а другой - к выходу блока 13 сравнения заданного и истинного значений шага винта 5, один из входов которого подключен к датчику 14 шага винта 5.
Система работает следующим образом.
При воздействии оператора на органы управления блок 1 вырабатывает задающую величину частоты вращения двигателя на программный блок 1 1, исполнительный механизм 6 и блок сравнения 13, а через коммутатор 2 на исполнительный механизм 3 винта 5. Исполнительный механизм 6 двигателя при изменении задающей величины воздействует на регулятор 7 оборотов, который устанавливает и поддерживает частоту вращения двигателя 8. Двигатель соединен с винтом 5 регулируемого шага и развивает необходимый крутящий момент. Крутящий момент измеряется датчиком 9 нагрузки. Результат измерения в виде истинного значения несущей величины момента поступает в регулятор 10 нагрузки. Программный блок 11 по задающей величине частоты вращения двигателя формирует предпи санное значение момента двигателя, учитывая его ограничительную характеристику для заданной частоты вращения. Этот сигнал поступает в регулятор 10 нагрузки. Исполнительный механизм 3 винта 5 при изменении входного сигнала изменяет управляющее воздействие на механизм 4 изменения щага, который, в свою очередь, устанавливает и поддерживает требуемую величину щага винта 5. Датчик 14 щага измеряет положение лопастей винта 5 и вырабатывает сигнал истинного значения величины щага на вход блока 13 сравнения.
В случае отсутствия перегрузки двигателя на выходе блока 12 па.мяти сигнал отсутствует, а через коммутатор 2 задающая величина щага от блока I задания проходит на вход исполнительного механизма -3 винта 5. Происходит управление шагом винта непосредственно от блока задания 1.
При перегрузке двигателя в элементе сравнения регулятора 10 нагрузки вырабатывается дискретный сигнал о перегрузке и вводится в блок 12 памяти. По этому сигналу блок 12 вырабатывает дискретный сигнал, который по752684
ступает в регулятор 10 нагрузки и коммутатор 2. В результате коммутатор 2 подключает на выход вместо задающей величины щага винта от блока 1 задания задающую величину шага винта, выработанную регуляторо.м 10 S нагрузки, которая изменит в исполнительном механизме 3 винта 5 управляющее воздействие на механизм 4 изменения щага до такой величины, когда шаг вннта установится таким, чтобы уменьщить нагрузку на двигатель до предписанного значения крутящего момента, соответствующего ограничительной нагрузке двигателя при частоте вращения.
Обратный пepe.oд на управление щагом винта от блока задания 1 происходит автоматически, когда истинное значение величины щага от датчика 14 превысит задающую величину шага от блока 1 задания. При этом блок 13 сравнения выработает дискретный сигнал в блок 12 памяти на «стирание памяти, в результате чего спи.мается сигнал, поступающий от блока 12 памяти в регулятор. 10 нагрузки и ко.ммутатор 2. При этом коммутатор 2 пропустит на исполнительный механизм 3 задающую величину шага от блока 1 задания.
Формула изоб-ретения
Система управления судовым главным двигателем и винтом регулируемого шага, содержащая блок задания режимов работы, связанный через программный блок, регулятор нагрузки, ком.мутатор, соединенный одним из входов непосредственно с выходом блока задания режимов работы, и исполнительный механизм винта регулируемого щага с механизмом изменения щага винта с датчиком щага и через исполнительный механизм двигателя - с регулятором оборотов двигателя, снабженного датчико.м нагрузки, выход которого соединен с одним из входов регулятора нагрузки, отличающаяся тем, что, с целью повышения надежности, она снабжена блоко.м сравнения заданного и истинного значений шага винта и блоком памяти, причем выход блока сравнения связан с одним из входов блока памяти, другой вход которого соединен с выходом элемента сравнения регулятора нагрузки, а выход - с одним из входов регулятора нагрузки и одним из входов коммутатора.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 383651, кл. В 63 Н 21/22, 07.09.70.
2.Авторское свидетельство СССР № 379452, кл. В 63 Н 21/22, 1971.