I
i Известно устройство для позиционного управления шаговым двигателем, содержащее генератор импульсов, имеющий входы для увеличения и снижения частоты, и выход, связанный с коммутатором фаз шагового5
двигателя через ключ, управляемый счетчиком.
В предлагаемое устройство для повышения быстродействия введена схема сравнения, подключенная входами к выходам счетчика, Ю а выходами - к входам генератора.
Кроме того, в устройство введены реверсивный счетчик, датчик шагов двигателя, сигнальное устройство и компаратор, подклк ченный входами к выходам ключа и датчика 15 ша1Х)в, а выходами - ко входам реверсивного счетчика, выход которого соединен с сигнальным устройством, связанным со входом ключа.
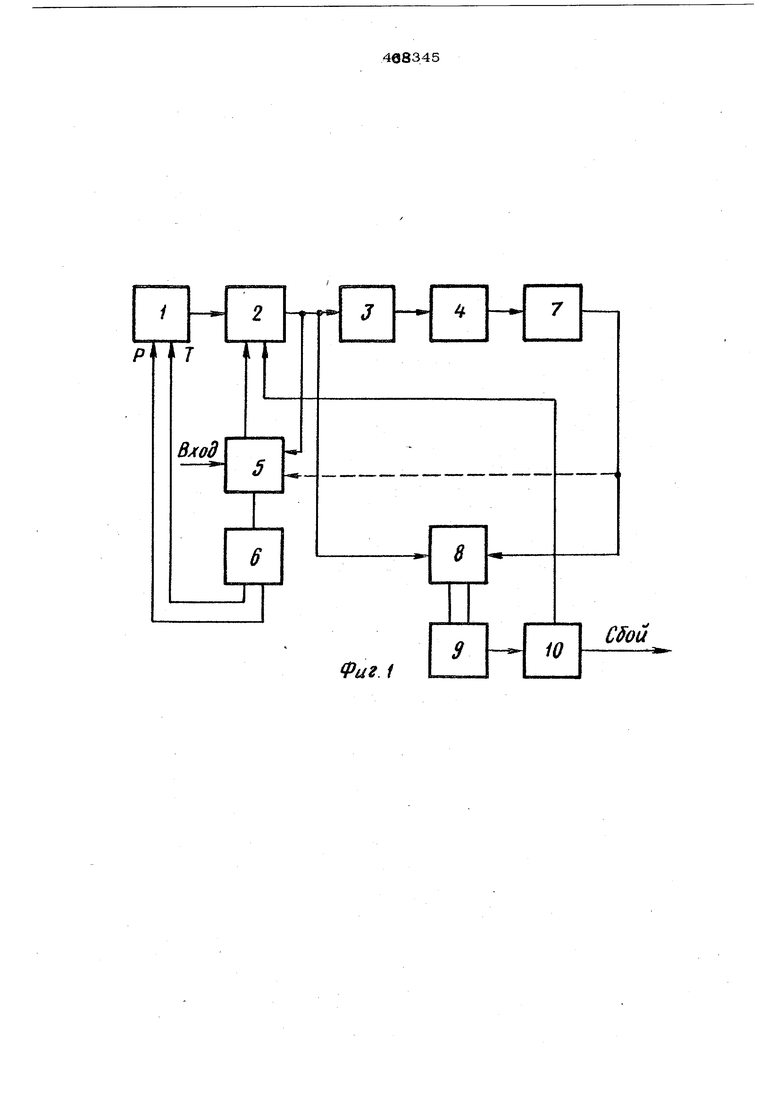
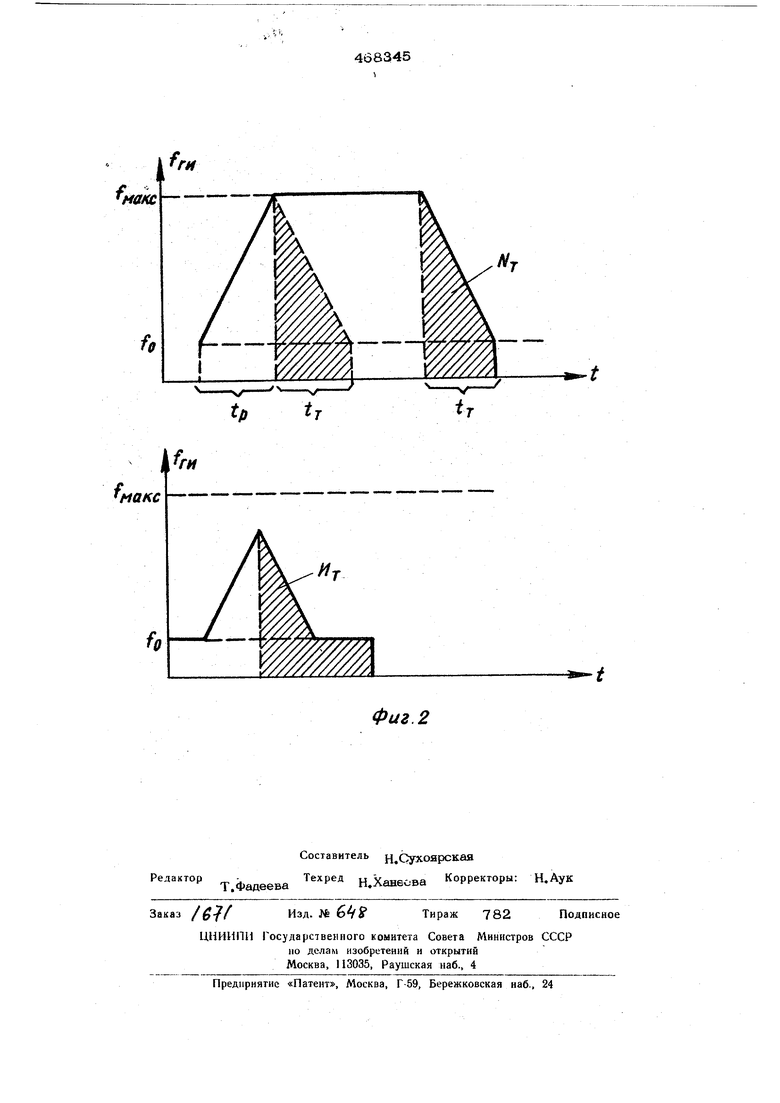
На фиг. 1 изображена блок-схема предла- 20 гаемо1Х) устройства; на фиг.2- временные диаграммы изменения частоты при отработ ке различных по величине перемещений.
Устройство содержит управляемый генератор импульсов 1 с двумя входами соот- 25
ветственно для команд Разгон (Р) и Торможение (Т). Выход генератора 1 соединен через ключ 2 с коммутатором 3 переключающим фазы шагового двигателя 4. Ключ 2 управляется счетчиком 5, выходы которого связаны со схемой сраанения 6, подключенной своими выходами ко входам Р и Т генератора 1. Выходы датчика шагов 7 и ключа 2 соединены со входами компаратора 8, выходы которого подключены ко входам дополнительного реверсивного счетчика 9, соединенног-о с сигнальным устройством 1О.
Устройство работает следующим образ1) В исходном состоянии на генератор ш.1пульсов 1 подан сигнал Торможение и он работает с минимальной частотой „ меньшей частоты гфиемистости. Счетчик 5 находится .в нулевом состоянии, и ключ 2 закрыт, при этом импульсы с renepaTxifia 1 на коммутатор не проходят. Сигналы нм входах и выходах компаратора 8 оп:;ук:твуют, и реверсивный счетчик 9 также нлхи дится в нулевом состоянии.
При подаче на вход счетчика 5 nmj fiNirtции на перемещение, заданной в параплепь ном коде, счетчик 5 открывает ключ 2 и : импульсы с генератора 1 (с частотой ниже частоты/фиемистости) проходят на коммутатор 3. Одновременно схема сравнения 6выдает на генератор 1 команду РазгойГд что приводит к нарастанию частоты с задан ным темпом (не превышающим допустимого для двигателя). Импульсы с выхода ключа 2 поступают на вход считывания счетчика 5, Когда количество импульсов N7 записанное в счетчике 5, станет равным количеству импульсов, необходимому для тормо ; жения двигателя с максимальной скоростью и определяемому (см.фиг.2) „как NT.Y, о где - частота следования импульсов; - время торможения; то схема сравнения 6 подает на генератор 1 сигнал Торможение и переводит его в режим уменьшения частоты. Темп уменьшения частоты при торможении выби рвется из условия обеспечения надежного торможения двигателя с максимальной скоростью. При переходе счетчика 5 в нуле вое состояние ключ 2 запирается. Так как частота генератора импульсов 1 в момент запирания ключа (см.фиг.2) выбрана ниже частоты торможения, то шаговый двигатель останавливается в заданном положении без выбега (без потери информации). Рассмотренный случай относится к ра- ; боте шагового приврда при больших пере- мешениях, когда частота достигает максимального значения (см.фнг.2), макс.Если заданное перемещение меньше критического КЬ ) ,определяемого как tn )p + If dt, оо то процесс отработки отличается от оптимальното (см.фиг.2) и некоторый путь -т- - -« V шаговый двигатель проходит с частотой Для контроля работы системы в схему j предлагаемого устройства может быть введен датчик шагов 7, вырабатывающий импульсы, число которых равно числу отработанных шагов. В этом случае на вход считывания счетчика 5 импульсы подаются с датчика 7 (пунктирная линия на фиг. 1). i Одновременно импульсы с выходов датчика7 и ключа поступают на входи компаратора 8, сравнивающего число и частоту задан-; ных импулнх)в, поступающих с выхода ключа 2, и отработанных, снимаемых с да-гчика 7. Известно, что при нормальной работе шагового двигателя динамическая ошибка не должна превышать число t / g шагов, где }% - число тактов коммутации, ; Емкость реверсивного счетчика 9 выбира ется на это число импульсов. При превышении допустимой динамической ошибки, т.е. при переполнении счетчика 9, сигнальное ; устройство 10 запирает ключ 2 и прекраша-. ет работу с выдачей сигнала Сбой. Если, динамическая ошибка в процессе отработки заданного перемещения не превышала допустимой, то сигнальное устройство оазоешает „ ,-0 -1рииьгъи разрешает дальнейшую работу системы, j t- j Предмет изобретения 1. Устройство для позиционного управления шаговым двигателем, содержащее генератор импульсов, имеющий входы для увеличения и снижения частоты, и выход, связанный с коммутатором фаз шагового двигателя через ключ, управляемый счет , чиком, отличающееся тем, что, с целью повышения быстродействия, введена схема сравнения, подключенная входами к выходам счетчика, а выходами - к входам генератора. 2. Устройство по П.1, отлича юш е е с я тем, что введены дополнительный реверсивный счетчик, датчик шагов двигателя, сигнальное устройство и компаратор. подключенный входами к выходам ключа и датчика шагов, а выходами - ко входам реверсивного счетчика, выход которого соединен с сигнальным устройством, связанным со входом ключа.
. 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1986 |
|
SU1334350A1 |
| Устройство для позиционного управления шаговым двигателем | 1979 |
|
SU783941A2 |
| Дискретный электропривод со стабилизацией скорости | 1983 |
|
SU1108601A1 |
| Устройство для управления шаговым двигателем | 1977 |
|
SU736334A2 |
| Устройство для управления шаговым двигателем | 1973 |
|
SU515236A1 |
| Устройство для управления шаговым двигателем | 1983 |
|
SU1108600A1 |
| Устройство для автоматической сварки неповоротных стыков труб | 1985 |
|
SU1301607A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ШАГОВЫЛ! ДВИГАТЕЛЕМ | 1968 |
|
SU212355A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1356176A2 |
| Устройство для управления шаговым двигателем | 1984 |
|
SU1267582A1 |
Фиг i
С$ой
10 фиг. 2
