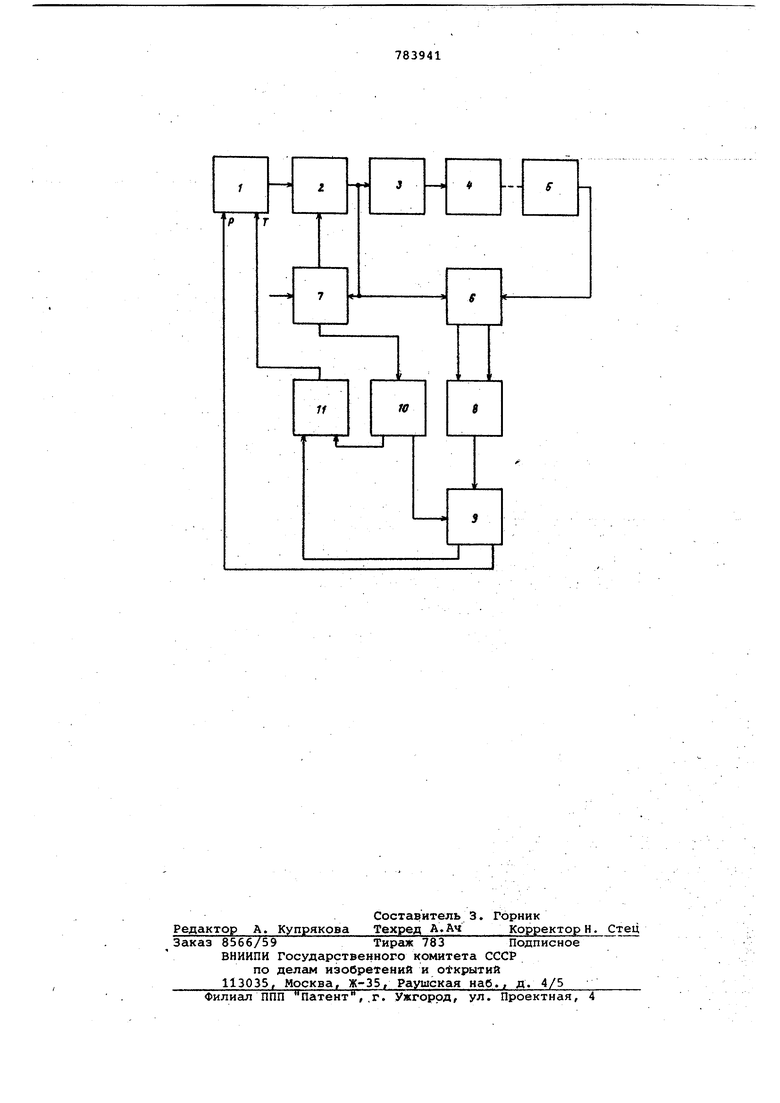
лик 5 шагов, выход которого по ключен к первому входу компаратора ;б. Выход ключа 2 соединен также со вторыми входами компаратора 6 и счетчика 7. Выходы компаратора б -подключены к входс1м реверсивного ;, счетчика 8, выход которого подклю.чен к первому входу блока 9 анализа динамической ошибки двигателя. Второй вход блока 9 анализа подключен к второму выходу схемы 10 сравнения, вход которой соединен со вторым выходом счетчика 7. Первый выход сче гчика 7 управляет работой ключа 2.
Первые выходы схемы 10 сравнения и блока 9 анализа прдключены к входа элемента ИЛИ 11. Выход элемента ИЛИ 11 подключен к входу Т генератора 1 Второй выход блока 9 ана:лиза подключен к входу Р генератора 1.
Устройство работает следующим образом.
В исходном состоянии на вход Т генератора 1 поступает сигнал от счетчика 7 через схему 10 сравнения и элемент ИЛИ 11. Генератор 1 вырабатывает импульсы низкой частоты, соответствующей частоте приемистост шагового двигателя 4. Ключ 2. заперт сигналом нулевого состояния счетчика 7. Сигналы на входах и выходах .компаратора б отсутствуют, реверсивный счетчик 8 находится в нулевом Состоянии, на выходах блока 9 анализа сигналы отсутствуют, так как он заблокирован сигналом, поступающим из схемы 10 сравнения. При пода че на первый вход счетчика 7 информции на перемещение сигнал с первого выхода счетчика Т открывает ключ 2, и импульсы с генератора 1 поступают на вход коммутатора 3 и вторые входы счетчика 7 и компаратора б.
Если величина перемещения превышает расстояние, необходимое для торможения шагового двигателя, то на втором выходе счетчика 7 вырабатывается сигнал, который через схему 1C сравнения и элемент ИЛИ 11 снмает сигнал со входа Т генератора 1 и включает блок 9 анализа. Так как состояние реверсивного счетчика 3 в ЭТОТмомент равно нулю, блок 9 анализа выдает сигнал на вход Р генератора 1, частота которого начинаётплййно увеличиваться.Шаго- вый двигатель 4 отрабатывает поступающке сигналы и приводит в движение да тчик 5 шагов. С выходов ключа 2 и датчика 5 шагов на входы KOMifaратора 7 поступают сигналь, которые свыходов компаратора 7 проходят на
трямой и обратный входы реверсивного счетчика 8 соответственно. ; Состояние реверсивного счетчика |8 соответствует величине динамичесйой ошибки шагового двигателя 4. Увеличение частоты генератора 1 продолжается до тех пор, пока величина динамической ошибки не достигнет границы верхней установленной величины (но не более п/2,
где п - число шагов коммутации), после чего блок 9 анализа снимает сигнал с входам Р генератора 1 и выдает через элемент ИЛИ 11 сигнал на вход Т генератора.
При плавном снижении частоты генератора 1 величина динамической ошибки снижается и достигает нижней .. границы установленной величины. При.; состоянии реверсивного счетчика 8, .. соответствующем нижней границе установленной величины динамической
ошибки, блок 9 анализа снимает сигнал со входа Т. генератора 1 и выдает сигнал на вход Р генератора 1.
Таким образом, при отработке заданного перемещения с. помощью измен.ения частоты генератора 1 величина динамической ошибки находится в установленных пределах и сбой работы системы не происходит. Когда состояние счетчика 5 станет равным дистанции торможения, со второго выхода схемы 10 сравнения в блок 9 анализа поступает сигнал, который блокирует
выработку сигналов на его выходах. С первого BbixdSа схемы сравнения через элемент ИЛИ 11 при этом поступает сигнал на вход Т генератора 1. Частота генератора 1 плавно снижается до частоты приемистости. При появлении нулевого состояния счетчика 7 ключ 2 закрывается, и отработка заданного перемещения завершается.
Формула изобретения.
. Устройство для позиционного управления шаговым двигателем по авт.св. № 468345,0 т л и ч. а ю щ ее с я тем,что,с целью повышения надежности, оно Содержит элемент ИЛИ и блок-анализа динамической ошибки двигателя, подключенный первым вх.рдом к выходу реверсивного, счетчиlia, вторым входом - к второму выходу схемы сравнения, вторым вы-.
ходом - к входу увеличения частоты генератора, а первым - к одному из входов элемента ИЛИ, соединенного входом с первым выходом схемы сравнения и выходом - с входом снижения частоты генератора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1986 |
|
SU1334350A1 |
| Следящая система | 1985 |
|
SU1290251A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1356176A2 |
| Устройство для позиционного управления шаговым двигателем | 1973 |
|
SU468345A1 |
| Устройство для управления шаговым двигателем | 1977 |
|
SU736334A2 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1607071A1 |
| Устройство автоматической подстройки частоты генератора | 1990 |
|
SU1838879A3 |
| Устройство для управления шаговым двигателем | 1983 |
|
SU1108600A1 |
| Следящий электропривод | 1985 |
|
SU1259207A2 |
| Стохастический вольтметр | 1975 |
|
SU731578A1 |