1
Гидравлические следящие системы неограниченного угла, состоящие из гидроусилителя мощности, распределительного золотника и реверсивного гидромотора, известны.
В отличие от известных устройств, в которых используется четырехщелевой гидроусилитель, в предложенном устройстве применен однощелевой, что значительно повышает надежность системы, так как число регулируемых рабочих окон в одном каскаде минимально, и упрощает ее регулировку и отладку.
Кроме того, принципиально новым в предложенной системе является сложение входного сигнала, задаваемого в виде угла поворота управляющего золотника, с сигналами обратной связи, поступающими от распределительного золотника следящей системы в виде его движения вдоль оси и поворота вокруг оси, кинематически связанной с выходным валом силового реверсивного гидромотора.
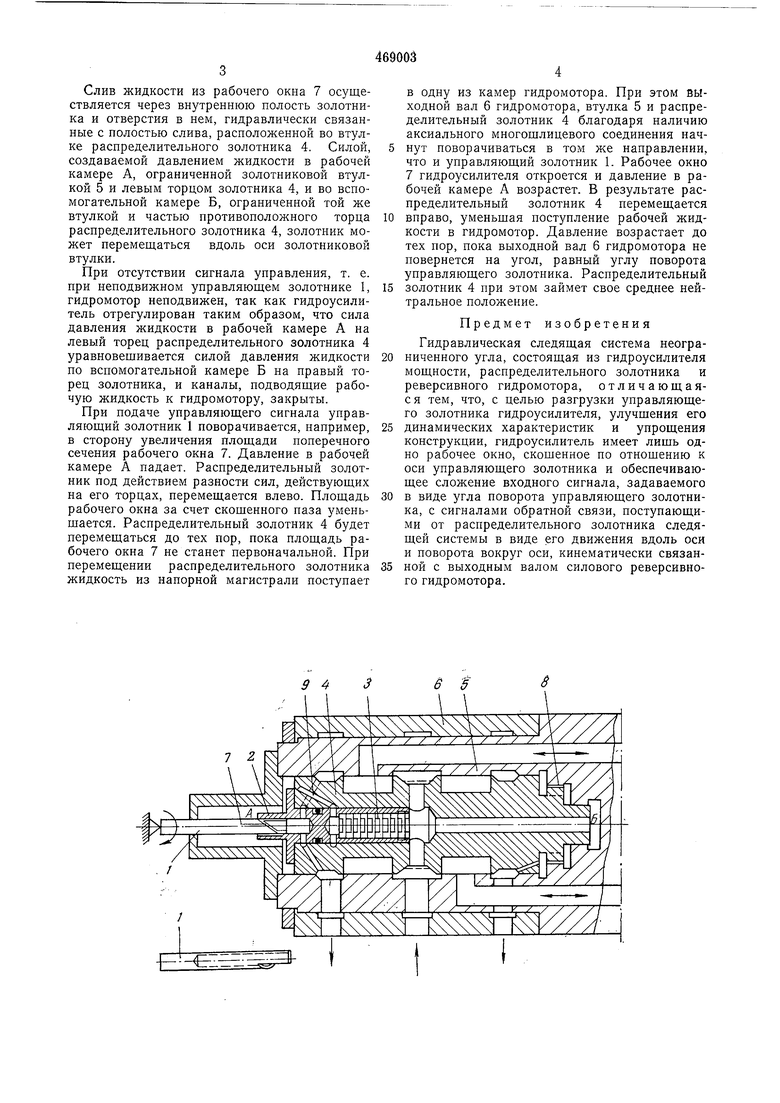
На чертеже представлена схема гидравлического усилителя мощности.
Гидравлическая система представляет собой совокупность двух устройств: однокромочного гидроусилителя мощности с обратной связью по перемещению распределительного золотника и гидравлического исполнительного механизма дроссельного управления с обратной связью.
Конструктивно усилитель состоит из управляющего золотника 1 с одной скошенной кромкой, рабочей втулки 2 (тоже со скощенной кромкой), одного постоянного многоступенчатого дросселя 3, распределительного золотника 4, втулки 5, жестко связанной или вмонтированной в выходной вал 6 гидромотора, и неподвилчной обоймы, которая в некоторых конструкциях может являться частью
корпуса гидромотора (на чертеже не показан). Кромки скошенных пазов, выполненные на боковой поверхности золотника 1 и в рабочей втулке 2, образуют рабочее окно 7. Втулка 2 свободно перемещается относительно управляющего золотника 1 и укреплена на левом торце распределительного золотника 4.
Распределительный золотник имеет продольное шлицевое соединение 8 с втулкой 5,
что обеспечивает возвратно-поступательное движение золотника относительно втулки 5 и вращательное движение вместе с втулкой.
Рабочее окно 7 соединяется через рабочую камеру А и отверстие 9 в распределительном
золотнике 4 с дросселем 3, расположенным и золотнике, и далее с источником давления жидкости, которая одновременно подводится через внутреннюю полость в распределительном золотнике 4 и во вспомогательную камеру Б.
Слив жидкости из рабочего окна 7 осуществляется через внутреннюю полость золотника и отверстия в нем, гидравлически связанные с полостью слива, расположенной во втулке распределительного золотника 4. Силой, создаваемой давлением жидкости в рабочей камере А, ограниченной золотниковой втулкой 5 и левым торцом золотника 4, и во вспомогательной камере Б, ограниченной той же втулкой и частью противоположного торца распределительного золотника 4, золотник может перемеш,аться вдоль оси золотниковой втулки.
При отсутствии сигнала управления, т. е. при неподвижном управляющем золотнике 1, гидромотор неподвижен, так как гидроусилитель отрегулирован таким образом, что сила давления жидкости в рабочей камере А на левый торец распределительного золотника 4 уравновешивается силой давления жидкости по вспомогательной камере Б на правый торец золотника, и каналы, подводящие рабочую жидкость к гидромотору, закрыты.
При подаче управляющего сигнала управляющий золотник 1 поворачивается, например, в сторону увеличения площади поперечного сечения рабочего окна 7. Давление в рабочей камере А падает. Распределительный золотник под действием разности сил, действующих на его торцах, перемещается влево. Площадь рабочего окна за счет скошенного паза уменьшается. Распределительный золотник 4 будет перемещаться до тех пор, пока площадь рабочего окна 7 не станет первоначальной. При перемещении распределительного золотника жидкость из напорной магистрали поступает
в одну из камер гидромотора. При этом ЁЫходной вал 6 гидромотора, втулка 5 и распределительный золотник 4 благодаря наличию аксиального многощлицевого соединения начнут поворачиваться в том же направлении, что и управляющий золотник 1. Рабочее окно 7 гидроусилителя откроется и давление в рабочей камере А возрастет. В результате распределительный золотник 4 перемещается
вправо, уменьшая поступление рабочей жидкости в гидромотор. Давление возрастает до тех пор, пока выходной вал 6 гидромотора не повернется на угол, равный углу поворота управляющего золотника. Распределительный
золотник 4 при этом займет свое среднее нейтральное положение.
Предмет изобретения
Гидравлическая следящая система неограниченного угла, состоящая из гидроусилителя мощности, распределительного золотника и реверсивного гидромотора, отличающаяся тем, что, с целью разгрузки управляющего золотника гидроусилителя, улучшения его
динамических характеристик и упрощения конструкции, гидроусилитель имеет лишь одно рабочее окно, скошенное по отношению к оси управляющего золотника и обеспечивающее сложение входного сигнала, задаваемого
в виде угла поворота управляющего золотника, с сигналами обратной связи, поступающими от распределительного золотника следящей системы в виде его движения вдоль оси и поворота вокруг оси, кинематически связанной с выходным валом силового реверсивного гидромотора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| Однокоординатная следящая сис-TEMA | 1979 |
|
SU844834A1 |
| ГИДРОМАШИНА | 1992 |
|
RU2101586C1 |
| Четырехлинейный гидрораспределитель с плоским поворотным золотником | 2002 |
|
RU2219353C2 |
| Гидроусилитель | 1976 |
|
SU564448A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С ПЛОСКИМ ПОВОРОТНЫМ ЗОЛОТНИКОМ И ЦЕНТРАЛЬНЫМ ПРИВОДОМ МОДУЛЬНОГО ИСПОЛНЕНИЯ ДЛЯ ВСТРОЕННОГО МОНТАЖА С РЕАЛИЗАЦИЕЙ ФУНКЦИИ АКТИВНОГО ДЕМПФИРОВАНИЯ | 2008 |
|
RU2374506C1 |
| Гидрообъемная трансмиссия полно-пРиВОдНОгО ТРАНСпОРТНОгО СРЕдСТВА | 1976 |
|
SU823182A1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ФОРМИРОВАНИЯ И КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ МИКРОПЕРЕКРЫТИЙ ПЛОСКОГО ПОВОРОТНОГО ЗОЛОТНИКА ЧЕТЫРЕХЛИНЕЙНОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ И ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ РАБОТЫ ДВУХ ИЛИ БОЛЕЕ ГИДРОРАСПРЕДЕЛИТЕЛЕЙ В СОСТАВЕ МНОГОКАНАЛЬНОГО СЛЕДЯЩЕГО ГИДРОПРИВОДА И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2301913C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| ГИДРАВЛИЧЕСКИЙ ВРАЩАТЕЛЬНЫЙ СЛЕДЯЩИЙ РУЛЕВОЙ ПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТОМ | 1964 |
|
SU165056A1 |
