Изобретение относится к области гидроавтоматики и может быть использовано, например, в системах числового программного управления станков и промышленных роботов.
Известна однокоординатная следящая система, содержащая задающий электродвигатель, связанный зубчатой передачей с золотниковым дросселирующим гидроусилителем, дросселирующие щели которого образованы золотниковыми поясками и взаимодействующими с ними наружными окнами, подключенным к источнику питания, сливу и двум реверсивным гидромоторам, гидравлически связанным через гидроусилитель при постоянном взаимном . смещении с источником питания и сливом, и соединенным валами, с дифференциальным механизмом, выходной вал которого связан винтовой передачей с исполнительным органом и гидроусилителем Tl .
Недостатком известной системы является сложность конструкции гидроусилителя, состоящего из двух взаимносмещенных четырехкромочйых золотников.
Целью изобретения является упрощение конструкции.
Цель достигается тем, что гидроусилитель выполнен в виде двухпояскового золотника, при этом окна, образующие с поясками дросселирующие щели, попарно смещены друг относительно друга в осевом направлении и подключены к гидромоторам, а торцы золотника сообщены со сливом.
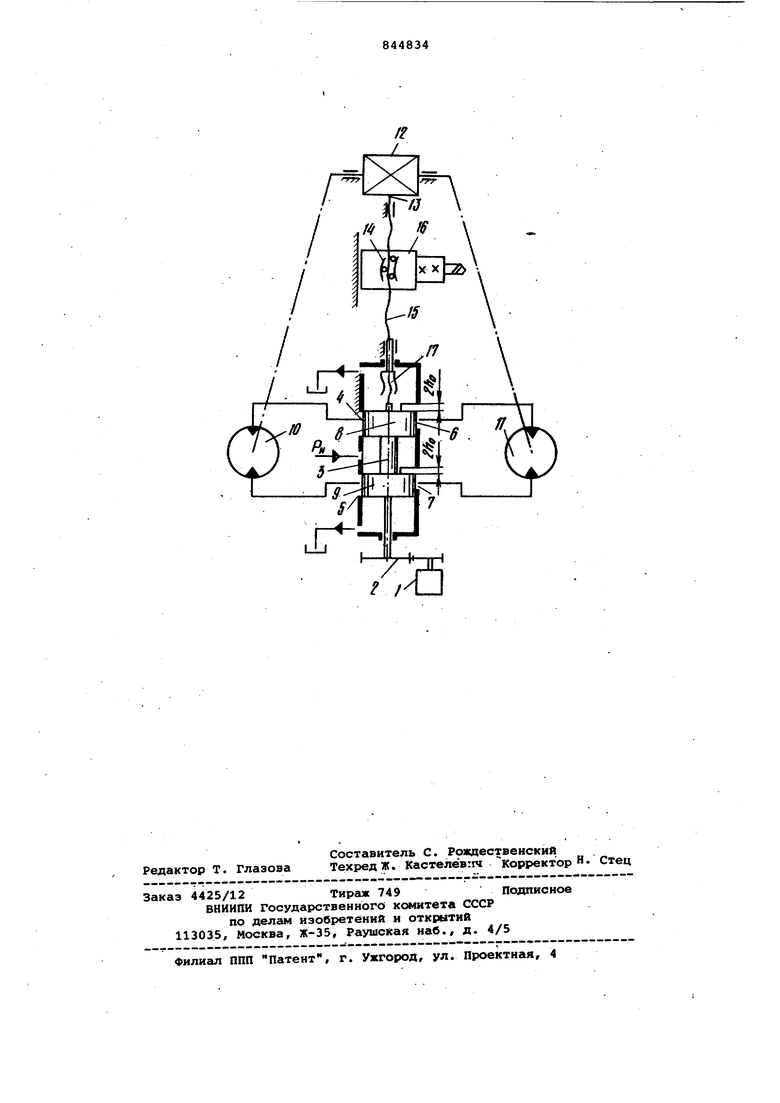
Сущность изобретения поясняется
10 чертежом, на котором изображена однокоординатная следящая система.
Система содержит задающий, например, шаговый электродвигатель 1, связанный зубчатой передачей (пони15 жающиП редуктор) 2 с золотниковым дросселирующим гидроусилителем, выполненным в.виде двухпонскового золотника 3, торцы которого сообщены со сливом, а окна которого 4, 5, 6
20 и 7, образующие с поясками 8 и 9 дроссепирующие щели, попарно смещены друг относительно друга и подключены к гидромоторам 10 и 11, валы которых (на чертеже не изображены)
25 связаны с механическим дифференциальным механизмом 12, выходной вал 13, которого через винтовую передачу гайка 14 - винт 15, связан с исполнительным органом, например, резцедержателем 16 и через винтовое сравнивающее устройство 17 - с золотнико 3. Смещение окон 4 и 5 относительно окон 6 и 7 на величину 2Ьр обеспечивает фазовое смещение в работе гидромоторов 10 и 11.
Источник питания (на чертеже не изображен) подключен к золотнику 3.
Система работает следующим образом.
При отсутствии входных управляющих импульсов от шагового электродвигателя 1, золотника 3 занимает относительно 4, 5, б и 7 среднее положение, при котором образуются четыре одинаковых дросселирующих щели длиной hp. В этом состоянии гидромоторы 10 и 11 имеют одинаковые скорости вращения, но разного направления. На выходе дифференциального механизма 12 скорость вала 13 равна нулю и ходовой винт 15 неподвижен.
При подаче управляющих импульсов шаговый электродвигатель 1 через понижающий редуктор 2 с помощью винтового сравнивающего устройства 17 смещает золотник 3 из среднего положения. Две дросселирующие щели становятся больше, а две другие меньше При этом скорость одного гидромотора возрастает, а другого - убывает. В результате ходовой винт 15 получает вращение со скоростью, пропорциональной разности частот вращения гидромоторов (идет рабочая подача). При дальнейшем увеличении частоты подачи управляющих импульсов растет рассогласование в размерах дросселирующих щелей золотника 3. Наконец наступает момент, когда один гидромотор останавливается и при дальнейшем увеличении рассогласования меняет свое направление вращения. С этого момента скорости гидромоторов 10
и 11 начинают суммироваться (холос.той ход) .
Применение данного изобретения в системах числового программного управления станков и промышленных роботов позволит упростить их конструкцию и, тем самым повысить их точность.
Формула изобретения
Однокоординатная следящая система, содержащая задающий электродвигатель, связанный зубчатой передачей с золотниковым дросселирующим гйд5 роусилителем, дросселирующие щели
которого-образованы золотниковыми поясками и взаимодействующими с ними наружными окнами, подключенным к источнику питания, сливу и двум ревер0 сивним гидромоторам, гидравлически связанным через гидроусилитель при постоянном взаимном смещении с источником питания и сливом, и соединенным валами с дифференциальным
5 механизмом, выходной вал которого связан винтовой передачей с исполнительным органом и гидроусилителем, отличающаяся тем, что, с целью упрощения конструкции, гидроусилитель выполнен в виде двухпояскового золотника, при этом окна, образующие с поясками дросселирующие щели, попарно смещены друг относительно друга в осевом направлении и подключены к гидромоторам, а торцы золотника сообщены со сливом.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 0 № 620684, кл. F 15 В 9/10, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| Гидроусилитель | 1980 |
|
SU928087A1 |
| Однокоординатная следящая гидравлическая система | 1976 |
|
SU620684A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| Электрогидравлический следящий привод системы автоматического управления органами стабилизации движения судна | 1976 |
|
SU610725A1 |
| ГИДРАВЛИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2012 |
|
RU2514812C1 |
| Гидравлический привод зубофрезерного станка с чпу | 1979 |
|
SU861008A1 |
| Электрогидравлический шаговый привод | 1971 |
|
SU481712A1 |
| Устройство для доворота и фиксации круглого стола станка | 1977 |
|
SU638448A1 |
| Гидравлическая система управления механизмами транспортного средства | 1987 |
|
SU1504142A1 |