1
Изобретение относится ,к системам автоматического управления (САУ) и может быть использовано в системах управления летательных аппаратов, содержащих элементы с ограничением.
Известно устройство для компенсации влияния ограничения, содержащее элемент с ограничением, первый и второй интеграторы с диодами в цепи обратной связи, при этом выходы интеграторов и вход устройства связаны с входом элемента с ограничением, а выход элемента с ограничением является выходом устройства.
Однако в таком устройстве форма компенсирующего сигнала (экспонента) не зависит от величины управляющего сигнала во время компенсации, в результате -чего понижается точность компенсации, и, кроме того, этот дополнительный компенсирующий сигнал вносит фазовое запаздывание в управляющий сигнал, что может привести даже к ухудщению динамических свойств САУ при односторопнем ограничении амплитуды полезного сигнала.
Предлагаемое устройство отличается от известного те.м, что содержит разнополярно включенные первый и второй диоды и источник постоянного тока со средней точкой, причем входы первого и второго интеграторов подсоединены непосредственно к крайним
клеммам источника постоянного тока, а через соответственно первый ai второй диоды - к входу устройства. Средняя точка источника питания связана с щиной нулевого потенциала.
Это позволяет повысить точность компенсации влияния ограничения.
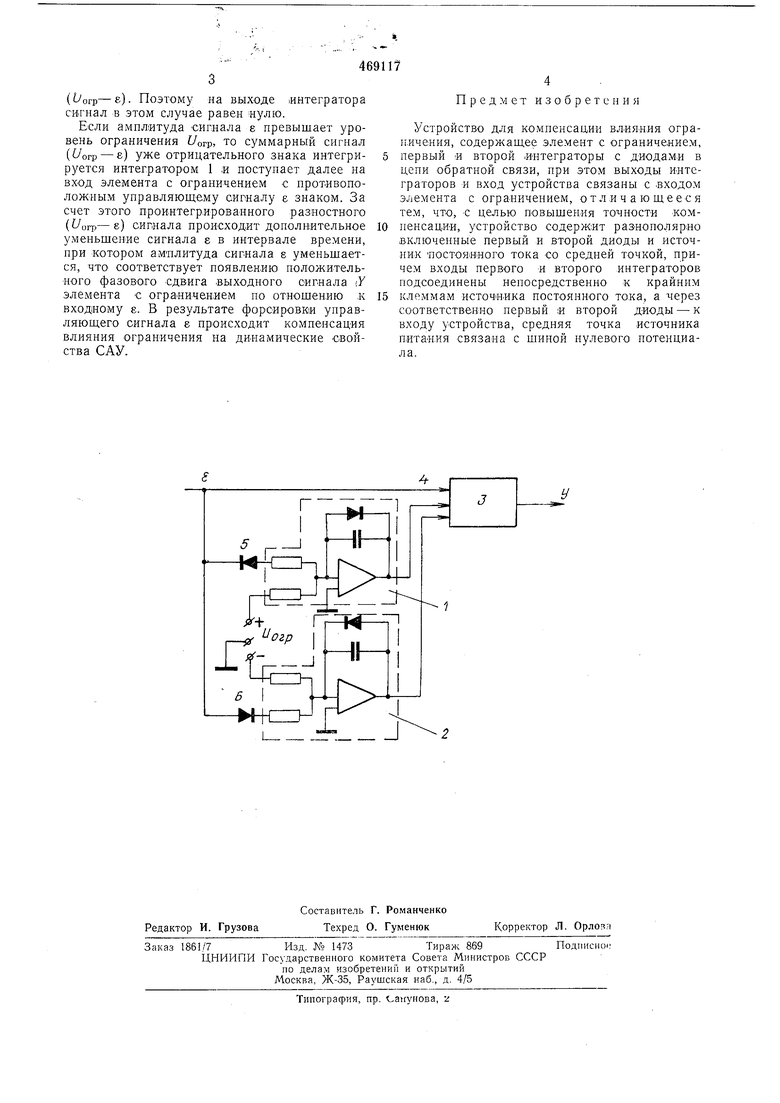
Блок-схема устройства приведена на черте}ке.
Устройство содерлшт интеграторы 1 и 2, элемент 3 с ограничением с входом 4, диоды 5 и 6.
Устройство работает -следующим образом. Управляющий сигнал е поступает как на
вход элемента 3 с ограничением, так и в зависимости от полярности либо через диод 5, либо диод 6 на входы интеграторов 1 или 2 соответственно. Так как работа интеграторов 1 и 2 аналогична, то работу устройства компенсации влияния ограничения рассмотрим на примере прохождения медленно изменяющегося отрицательного сигнала 2 через диод 5 и интегратор 1.
Если амплитуда сигнала е ниже уровня ограничения С/огр, то суммарный положительный сигнал (f/orp - е) на входе интегратора 1 инвертируется интегратором 1 и через диод обратной связи поступает на его вход, где
происходит компенсация разностного сигнала
(огр-е). Поэтому на выходе интегратора сигнал в этом случае равен нулю.
Если амплитуда сигнала е превышает уровень ограничения f/orp, то суммарный сигнал (f/orp - е) уже отрицательного знака интегрируется интегратором 1 ,и поступает далее на вход элемента с ограничением с противоположным управляющему сигналу е знаком. За счет этого прокнтегр.ированного разностного (огр-е) сигнала происходит дополнительное уменьшение сигнала е в интервале времени, нри котором амплитуда сигнала s уменьшается, что соответствует появлению положительного фазового сдвига выходного сигнала (У элемента с ограничением по отношению к входному 8. В результате форсировки управляюш,его сигнала е происходит компенсация влияния ограничения на динамические свойства САУ.
Предмет изобретения
Устройство для компенсации влияния ограничения, содержаш,ее элемент с ограничением, первый и второй интеграторы с диодами в цепи обратной связи, при этом выходы интеграторов и вход устройства связаны с .входом элемента с ограничением, отличающееся тем, что, с целью повышения точности компенсации, устройство содержит разнополярно включенные первый и второй диоды и источник ПОСТОЯННОГО тока со средней точкой, причем входы первого и второго интеграторов подсоединены непосредственно к крайним клеммам источника постоянного тока, а через соответственно первый и второй диоды - к входу устройства, средняя точка источника питания связана с шиной нулевого потенциала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсацииОгРАНичЕНия | 1974 |
|
SU809043A1 |
| Нелинейное корректирующее устройство для динамических систем с ограничением | 1975 |
|
SU603949A1 |
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ КР/\ЕВЫХ ЗАДАЧ | 1970 |
|
SU264803A1 |
| Формирователь импульсов | 1972 |
|
SU437205A1 |
| Способ компенсации влияния помехи на постоянную составляющую сигнала | 1982 |
|
SU1117584A1 |
| Нелинейный привод | 1975 |
|
SU591810A1 |
| Устройство для компенсации помех | 1978 |
|
SU763846A2 |
| Устройство для контроля многослойных диэлектриков | 1983 |
|
SU1095101A1 |
| Способ измерения напряженности магнитного поля и устройство для его осуществления | 1989 |
|
SU1775693A1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ИМПУЛЬСНЫХ ТОКОВ | 1990 |
|
RU2024025C1 |
