(54) УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ОГРАНИЧЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсации помех | 1978 |
|
SU763846A2 |
| Устройство для компенсации помех | 1975 |
|
SU565279A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Способ компенсации влияния помех во входном сигнале | 1972 |
|
SU463093A1 |
| Нелинейное корректирующее устройство для динамических систем с ограничением | 1975 |
|
SU603949A1 |
| Привод | 1977 |
|
SU679933A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2320071C1 |
| Устройство для подавления помех | 1978 |
|
SU809045A1 |
| Нелинейный привод | 1975 |
|
SU591810A1 |
Изобретение относится к нелинейным системам автоматического управления и может быть использовано для улучшения их динамических свойств. Известны устройства для компенсации отрицательного влияния ограничения на динамические свойства систем автоматического управления, содержащие последовательно соединенные сумматор на два входа и звено с ограничителем. К выходу сумматора подключены пороговый элемент и последовательно соединенные блок с зоной чувствительности и .интегратор. Выходы интегратора и порогового элемента соединены через ключ с одним из входов сумматора 1. Однако при использовании такого устройства в системах автоматического управления не достигается высокая точность компенсации влияния ограничения в виду того, что величина запомненного, проинтегрированного, разностного сигнала не зависит от параметров помехи во время его суммирования со входным сигналом. Кроме того, возможно ложное срабатывание порогового элемента под действием выходного сигнала интегратора. Известны также устройства для компенсации насыщения элементов автоматических систем, содержащие последовательно соединенные между собой блок с зоной нечувствительности и модель звена с ограничителем. Недостаток известных устройств состоит в том, что выходной сигнал в результате компенсации влияния ограничения превыщает величину уровня ограничения, что практически невозможно осуществить в исполнительных устройствах с ограничением, где зона действия ограничения наперед задана, например на летательных аппаратах, в целях исключения чрезмерных перегрузок 2. Наиболее близким к предлагаемому по технической сущности является устройство для компенсации влияния ограничения, содержащее элемент с ограничением, релейный элемент, суммирующий интегратор и источник постоянного тока, напряжение которого равно уровню ограничения элемента с ограничением. Кроме того, известное устройство содержит еще один релейный элемент, четыре диода,.два элемента сравнения, интегратор 3.
Однако известное устройство не может обеспечить высокую точность компенсации при изменении частоты помехи.
Цель изобретения - повышение точности устройства путем компенсации влияния ограничения на динамические свойства систем автоматического управления.
Указанная цель достигается тем, что вход устройства связан непосредственно с одним из входов суммирующего интегратора и через размыкающий контакт релейного элемента со входом элемента с ограничением, выход которого подключен к другому входу суммирующего интегратора, выход интегратора подключен к релейному элементу, а источник постоянного тока через замыкающий контакт релейного элемента связан со входом элемента с ограничением.
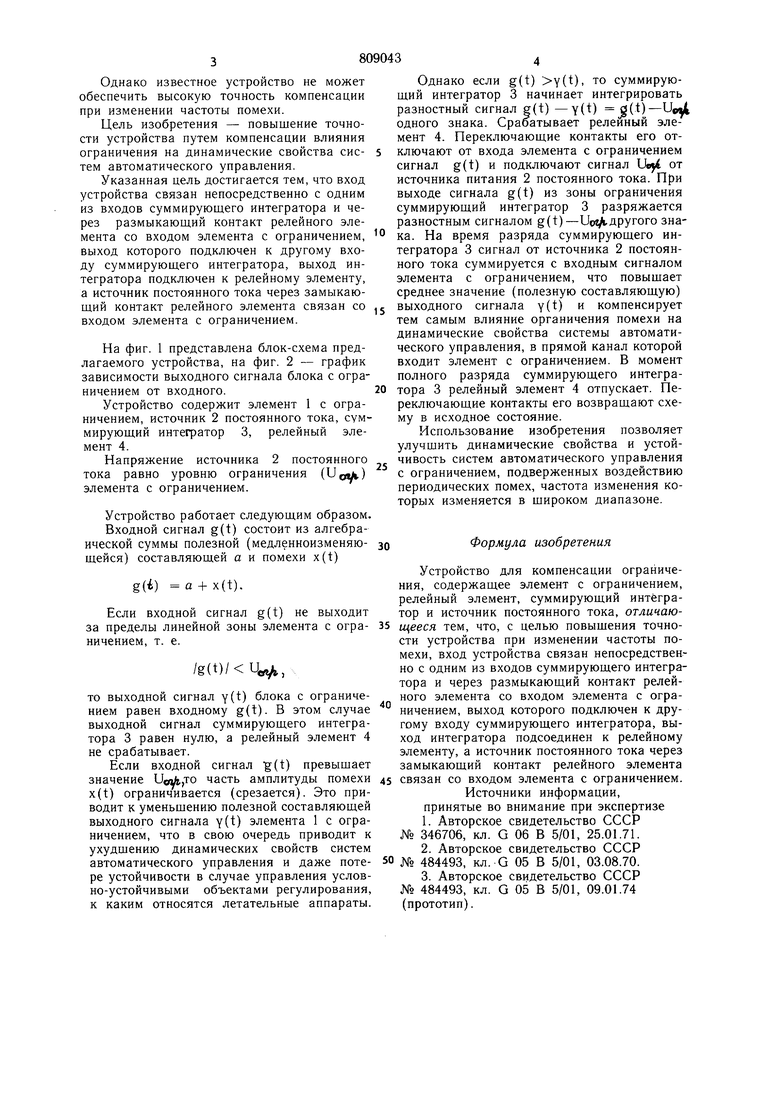
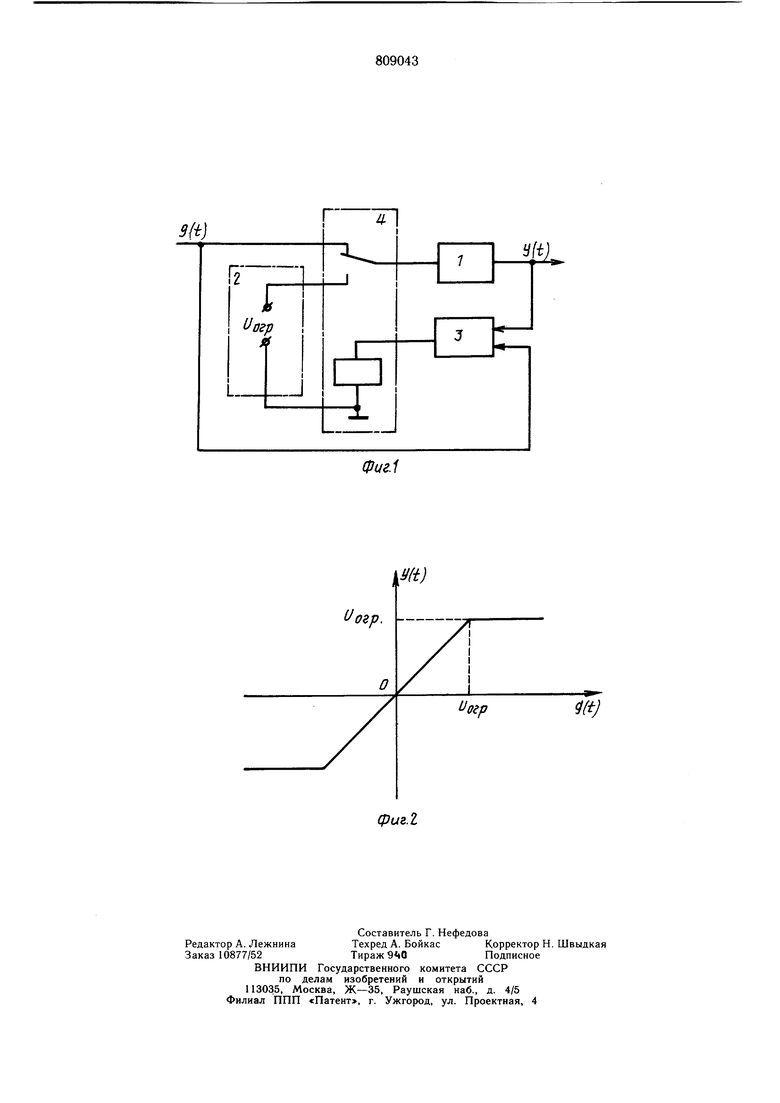
На фиг. 1 представлена блок-схема предлагаемого устройства, на фиг. 2 - график зависимости выходного сигнала блока с ограничением от входного.
Устройство содержит элемент 1 с ограничением, источник 2 постоянного тока, суммирующий интефатор 3, релейный элемент 4.
Напряжение источника 2 постоянного тока равно уровню ограничения (Uo) элемента с ограничением.
Устройство работает следующим образом.
Входной сигнал g(t) состоит из алгебраической суммы полезной (медленноизменяющейся) составляющей а и помехи x(t)
g(i) a + x(t).
Если входной сигнал g(t) не выходит за пределы линейной зоны элемента с ограничением, т. е.
/g(t), .
то выходной сигнал (i) блока с ограничением равен входному g{t). В этом случае выходной сигнал суммирующего интегратора 3 равен нулю, а релейный элемент 4 не срабатывает.
Если входной сигнал g(t) превыщает значение Uoifc,TO часть амплитуды помехи x(t) ограничивается (срезается). Это приводит к уменьщению полезной составляющей выходного сигнала (i элемента 1 с ограничением, что в свою очередь приводит к ухудшению динамических свойств систем автоматического управления и даже потере устойчивости в случае управления условно-устойчивыми объектами регулирования, к каким относятся летательные аппараты.
Однако если g(t) Y(t), то суммирующий интегратор 3 начинает интегрировать разностный сигнал g(t) -у() g(t)-Up«4 одного знака. Срабатывает релейный элемент 4. Переключающие контакты его отключают от входа элемента с ограничением сигнал g(t) и подключают сигнал ЦеЦ от источника питания 2 постоянного тока. При выходе сигнала g(t) из зоны ограничения суммирующий интегратор 3 разряжается разностным сигналом g(t)-исяД-другого знака. На время разряда суммирующего интегратора 3 сигнал от источника 2 постоянного тока суммируется с входным сигналом элемента с ограничением, что повышает среднее значение (полезную составляющую)
выходного сигнала у() и компенсирует тем самым влияние органичения помехи на динамические свойства системы автоматического управления, в прямой канал которой входит элемент с ограничением. В момент полного разряда суммирующего интегратора 3 релейный элемент 4 отпускает. Переключающие контакты его возвращают схему в исходное состояние.
Использование изобретения позволяет улучшить динамические свойства и устойчивость систем автоматического управления с ограничением, подверженных воздействию периодических помех, частота изменения которых изменяется в широком диапазоне.
Формула изобретения
Устройство для компенсации ограничения, содержащее элемент с ограничением, релейный элемент, суммирующий интегратор и источник постоянного тока, отличающееся тем, что, с целью повышения точности устройства при изменении частоты помехи, вход устройства связан непосредственно с одним из входов суммирующего интегратора и через размыкающий контакт релейного элемента со входом элемента с ограничением, выход которого подключен к другому входу суммирующего интегратора, выход интегратора подсоединен к релейному элементу, а источник постоянного тока через замыкающий контакт релейного элемента
5 связан со входом элемента с ограничением.
Источники информации, принятые во внимание при экспертизе
t)
и,
огр
