1
Изобретение относится к техническим средствам согласования датчиков первичной иифор.мации и регулирующих устройств в системах автоматического управления и может быть использовано для согласования указанных устройств в тех случаях, когда в сигналах, поступаюш их от датчика отклонения регулируемого параметра, присутствуют сигналы помехи.
Входные устройства регуляторов в системах автоматического управления обычно .выполняют на суммирующих усилителях. В различного типа ВХОДНЫХ устройствах присутствует один суммирующий усилитель, входы которого соединяются с выходами датчиков первичной информации. Если в сигналах датчиков отклонения регулируемой величины, скорости отклонения регулируемой величины и т. д. присутствуют сигналы помехи, то входные устройства вынолняются с применением RCфильтров. При наличии сигнала помехи в сигнале одного из датчиков фильтрующие цепи могут устанавливаться на выходе датчика или на соответствующем ему входе суммирующего усилителя. При наличии сигнала помехи в сигналах нескольких датчиков фильтр обычно подключается к суммирующей точке входного усилителя.
Однако такое выполнение входных устройств обладает тем недостатком, что при применении фильтров с малыми постоянными времени зачастую не удается достичь хорошего качества фильтрации, а использование фильтров с большими постоянными времени может привести к потере дипамической устойчивости системы управления.
Цель предлагаемого изобретения заключается в увеличении помехоустойчивости работы устройства.
Эта цель достигается тем, что входное устройство содержит апериодическое звено и дополнительный блок суммирования, первый , и второй вход которого подключены соответственно к датчикам отклонения регулируемой величины и скорости отклонения регулируемой величины, а выход дополнительного блока суммирования через апериодическое звено подключен к третьему входу блока суммирова;ния.
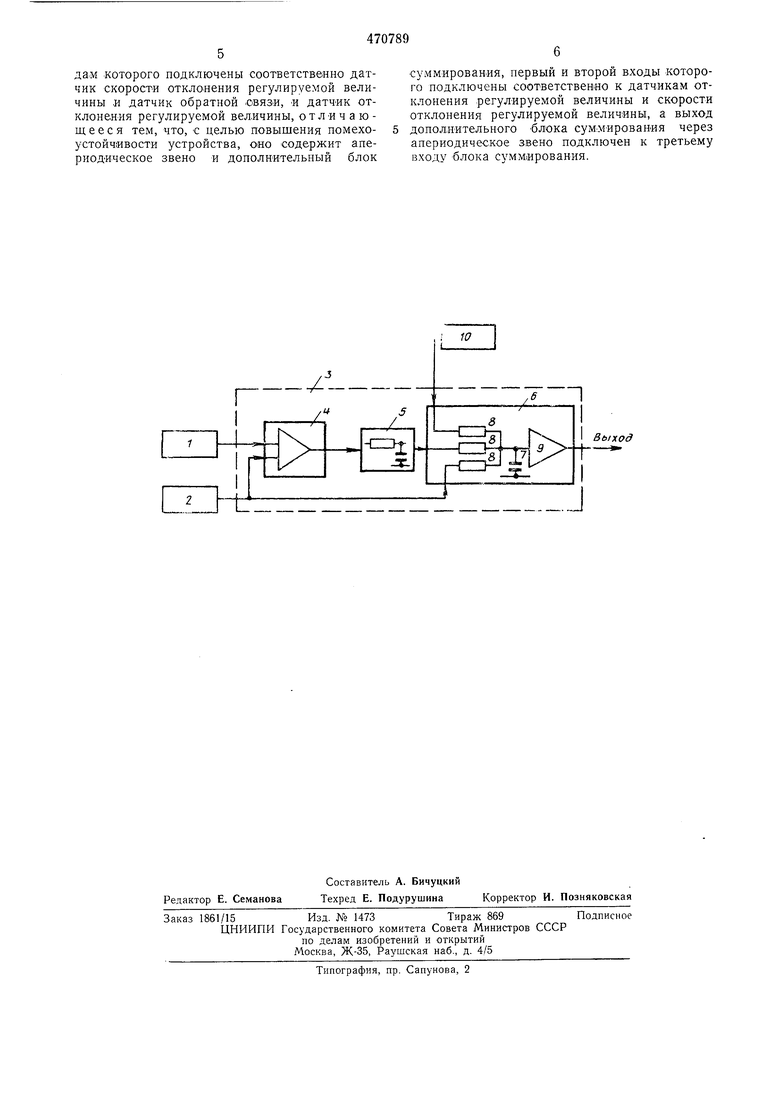
На чертеже представлена схема предлагаемого устройства. Оно содержит датчик отклонения (ДО) 1 регулируемой величины, датчик скорости отклонения (ДСО) 2 регулируемой величины, входное устройство 3 регулятора, 5 блок су.ммирования 4, апериодическое КС-звено 5, блок суммирования 6, конденсатор 7, суммирующие сопротивления 8, усилитель 9 и датчик обратной связи 10.
Выход ДО 1 соединен с одним входом блокг суммирования 4. Датчик ДСО 2 соединен с другим входом блока суммирования 4 « через суммирующее сопротивление 8 - с входом усилителя У. (Усилитель 9 совместно с суммйрующи,МИ сопротивлениями 8 образует блок суммирования 6). Вход апериодического звена 5 соединен с выходом блока сум.мированйя 4, а его выход - с входом суммирующего усилителя (другое сумМИрующее сопротивление 8 .и усилитель 9). Через третье суммирующее сопротивление 8 вход усилителя У соединен с датчиком обратной связи 10. Конденсатор 7 и сопротивление 8 образуют / С-фильтры на входе усилителя 9. Сигналы с ДО 1 и ДСО 2 поступают на входы блока суммирования 4, с выхода -которого суммарный Сигнал поступает на вход анериодичеокого звена 5, имеющего достоянную времени Т. Коэффициенты передач1И цепей от чувствительных элементов ДО 1 и ДСО 2 до входа апериодического звена 5 выбираются из УСЛОВИЯ . 1 „ 1... W т где - коэффициент передачи цепи от чувствительного элемента ДО 1 до входа апериодического Звена 5, Wz - коэффициент щередачи цепи от чувствительного элемента ДСО 2 до входа апериодического звена 5. В коэффициенты Wi и Wz входят передаточные функции самих датчиков и соответственно коэффициенты передачи блока сум-мирования по обоим входам. Такое соединение функциональных элементов и выбор соотнощений их параметров позволяет выбором постоянной времени Т звена 5 обеспечить на его выходе хорошее качество фильтрации полезного сигнала датчика отклоневи51 от сигнала помехи, г. е. на выходе звена 5 действует «чистый сигнал, несущий информацию о величине отклонения регулируеiMoro параметра. При этом в канал сигнала отклонения регулируемого параметра (ДО 1-блок суммирования 4 - С-звено 5 -сопротивление 8) не вносится дополн1итель ного запаздывания, т. е. введение дополнительного апериодического звена во входное устройство 3 не ухудшает динамических свойств системы управления в целом и не требует применения специальных iMep по обеспечению устойчивости системы управления. Вышеизложенное можно пояснить следующим образом. Пусть, например, система управления, в соС1ав которой входит рассматриваемое устройство, служит для по.ддержания заданного углового положения некоторого твердого тела относительно одной из осей его инерции. В таком случае ДО измеряет угловое отклоиение ф угл. град. от заданного положения, а угл. град. ДСО 2 - скорость отклонения ф L J от заданного положения. Суммарный сигнал на входе звена 5 в этом случае имеет вид и и,.К, + (2) и, /С,с + «0- электрический сигнал на выходе ДО 1, размерность - вольты - электрический сигнал на выходе ДСО 2, размерность Хь /(з - коэффициенты передачи устройства суммирования, безразмерные величины; K.Z - коэффициент передачи ДО 1, размер- ; Ki, - коэффициент передачи угл. град. J ДСО 2, размерность угл. град./сек сигнал помехи на выходе ДО 1. С учетом коэффициентов К, Kz, Кз, Л4 условие (1) имеет вид „. Ki-Кз . J н J,-J т и, принимая во внимание, что , -где Р - оператор Лапласа, (2) можно записать в виде и (f-K.-K, + УПОЫ) + Р-/С,-Л4 .( + ao- ) где, с учетом (1), Г -- Uz действует на входе апериодического звена 5, передаточная функция которого Wb -. Поэтому сигнал U на выходе этого звена, т. е. на входе блока суммирования 6, меет вид (/. (;,. -; ./с;/С, + °1 +1---Из уравнения (4) видно, что инерционность вена 5 не действует на полезный сигнал (ф-УСгЛ з), а его действие проявляется лишь на сигнал .помехи (/помПостоянная времени звена 5 выбирается из словия требуемого качества подавления сигала помехи. При этом учитывается возможость изменения коэффициентов /Ci и K.z таим образом, чтобы обеспечить соотношение Ki-K J К,-К, Т Результаты рассмотренного примера распротраняются на случаи регулирования других изических параметров (например, перемещеия, скорости, температуры и т. д.)-,при этом .лько размерности, сущность же ,3 фильтрации остается той же. Применение предлагаемого устройства возРJ J гаалы помехи оооих датчиков не коррелированы обой. Предмет изобретения Входное устройство регулятора, содержащее лок суммирования, к первому и второму вхсдам которого подключены соответственно датчик скорости отклонения регулируемой величины и датчик обратной связи, И датчик отклонения регулируемой величины, отличающееся тем, что, с целью повышения помехоустойчивости устройства, оно содержит апериодическое звено и дополнительный блок
суммирования, первый и второй входы которого подключены соответственио к датчикам отклонения регулируемой величины и скорости отклонения регулируемой величины, а выход дополнительного -блока сум:мирован«я через апериодическое звено подключен к третьему входу блока суммирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический фильтр | 1986 |
|
SU1388828A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Релейный стабилизатор постоянного напряжения | 1988 |
|
SU1529196A1 |
| Электрохирургический генератор | 2024 |
|
RU2834838C1 |
| Корректирующее устройство | 1979 |
|
SU783749A1 |
| Нелинейный фильтр | 1984 |
|
SU1233101A1 |
| Динамический фильтр | 1991 |
|
SU1828551A3 |
| Регулируемая установка продольной емкостной компенсации | 1984 |
|
SU1302375A1 |
| Релейный регулятор | 1990 |
|
SU1836658A3 |
| Релейно-импульсный регулятор | 1984 |
|
SU1280567A1 |
