(54) КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО
t
Изобретение относится к системам автоматического управления, в частности к их функциональным элементам, используемым для целей коррекции автоматических систем, и может быть использовано для коррекции или фильтрации сигнала ошибки управления в тех случаях, когда помимо последнего в системе управления присутствует сигнал скорости ошибки управления. Наибольшее применение предлагаемое устройство может найти при согласовании датчиков первичной информации систем управления и их регулирующих устройств.
Известно устройство, в котором для обеспечения фильтрации управляющего сигнала без ухудшения его фазовой характеристики используется апериодическое звено, входы которого соединены с источником корректируемого (фильтруемого) сигнала и с источником сигнала скорости корректируемого сигнала СЦ
Известное устройство может быть использовано только в тех случаях, когда необходимо подавление высокочастотных составляющих (выше частоты среза),присутствующих в корректируемом сигнале. Для выделения отдельных частот, присутствующих в корректируемом сигнале, или для их подавления в заданном интервале частот . устройство-прототип не может быть
5 использовано, что часто является его существенным недостатком.
Из известных устройств по технической сущности к предлагаемому устройству наиболее близко устройство, состоящее из последовательно . соединенных п интегросумматоров, первый вход первого из которых соединен с первым входом устройства 2 . Такое устройство может осущест 5 влять фильтрацию (коррекцию) сигнала по произвольному сложному закону, но вносит в корректируег.ий сигнал фазовые изкажения, ухудшаквдие устойчивость системы.
20 Цель изобретения - увеличение помехо защите нности,
Поставленная цель достигается тем, что вторые входы всех интегросумматоров соединены со вторым входом
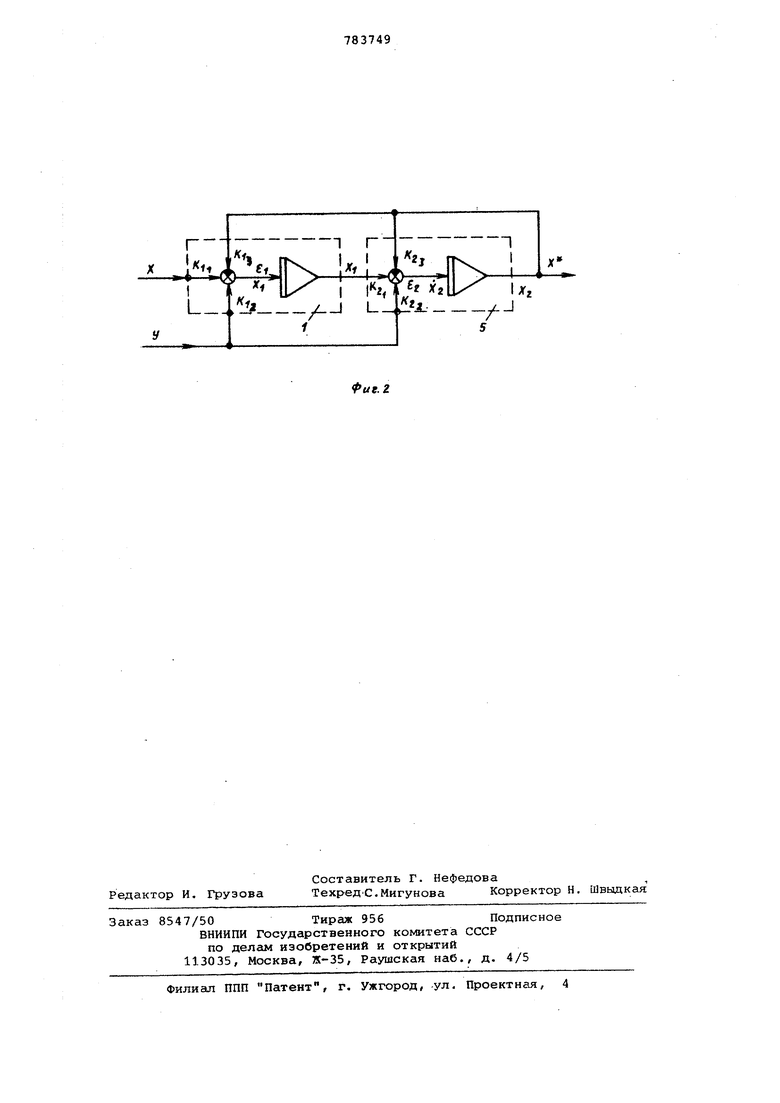
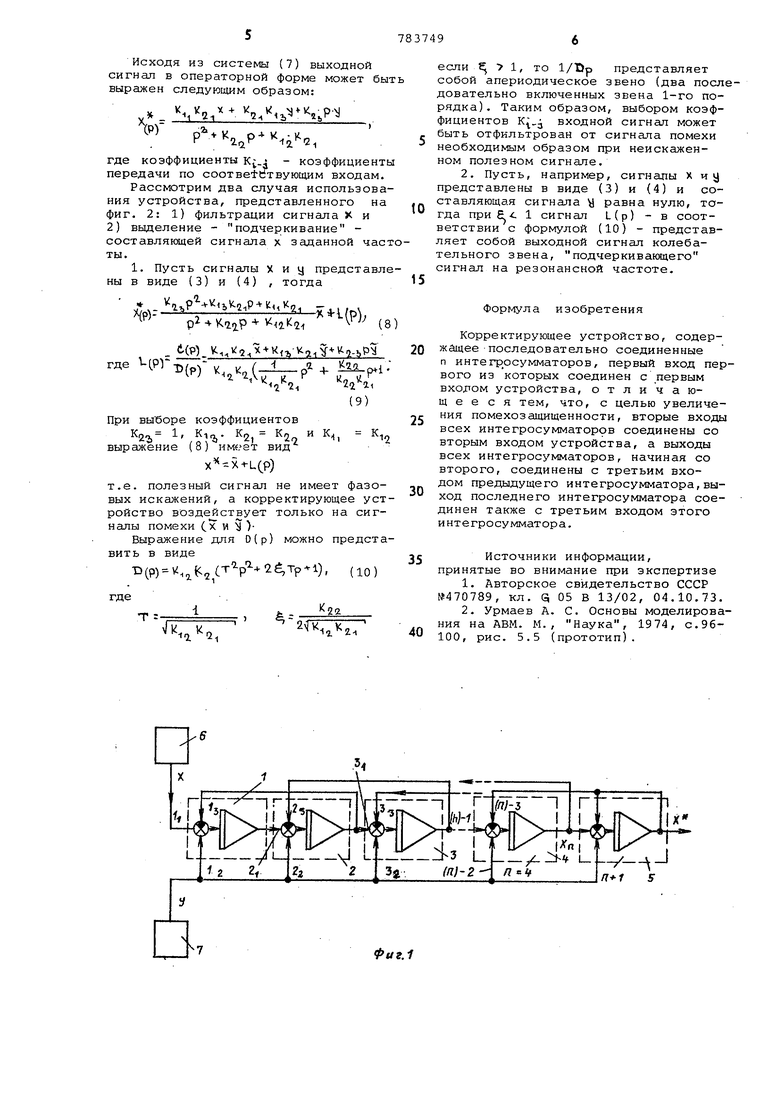
25 устройства, а выходы всех интегросумматоров, начиная со второго - с третьим входом предыдущего интегросумматора, выход последнего интегросумматора соединен также с третьим входом этого, интегросумматора. На фиг. 1 представлена структурная схема устройства. Устройство состоит из п интегросумматоров 1-4 и аперирдического зве на, выполненного на интегросумматор$ 5(п + 1). Вход 1, первого интегросумматора 1 соединен с выходом источ ника б корректируемого сигнала х, а первые входы (2, ., 3i , . . . , ( п) - 1 ) каладого последуквдего интегросумматфра связаны с выходом предыдущего интегросумматора. Каждый интегросумматор охвачен по третьему входу (Ij 2),, ..., {п)-3) цепью отрицательной обратной связи через предыдущий интегросумматор. Вторые входы соединены с источником 7 сигнала скорости корректируемого сигнала. На фиг. 2 представлен вариант уст ройства для случая , служащий для пояснения достигаемого эффекта. Порядок корректируквдего устройства определяется числом интегросумматоров, используемых в устройстве (на фиг. 1 представлен фильтр(п+1)порядка, на фиг. 2 - фильтр 2-го порядка). Сигнал х, поступающий на вход устройства, корректируется нужным образом, например: ослабляются сигналы помехи, присутствующие в нем, подчеркиваются (выделяются) сигналы заданных частот, сигналы по мехи в одном заданном диапазоне не ослабляются, а в другом подчеркива ются . При прохождении сигнала х через устройство он искажается (амплитудные и фазовые искалсения) .Если ампли тудные изменения сигнала х в заданном диапазоне частот являются положительным следствием использования корректирующего устройства, то фазо вые искажения (запаздывания) и амплитудные искажения вне заданного ч тотного интервс1ла нежелательны. Для восстановления полезного сигнала используется сигнал скоросги корректируемого (полезного) сигнала Передаточная функция заявляемого устройства может быть записана для сигнала х в следукщем виде: К .К %„,/....а,р., ЖР)(1) гдеа..., постоянные коэффийцент При отсутствии сигнала Cj выходно сигнал устройства имеет вид ЬЫ).Ъ(НР).- (2) Если представить сигнал х в виде х х + х составляющая сигнала X, негде X которую нужно пропустить через корректирукщее устрой ство без искажений (коррект сигнал) , X - составляющая сигнала х , которая должна быть отфильтрована, а сигнал у - аналогично в виде Nj.5 dx/dt y, (4) или иначе -У (Р)), то выходной сигнал устройства имеет вид .ч д„.,Р ) .. у 0n. Т(Р) DCP) При равенстве коэффициентов . и т.д. уравнение (5) имеет вид ,.:;,lb.iPL5 ч- Plrr Ч(р-) -D(p т.е. сигнал % не искажается. В зависимости от коэффициентов полинома D(p) сигналы х и у могут либо ослабляться, либо усиливаться (подчеркиваться), либо в одном диапазоне частот ослабляться, а в другом усиливаться. Для того, чтобы получить только ослабления сигнала X коэффициенты а выбираются таким образом, чтобы корректирующее устройство представляло собой последовательно включенные апериодические звенья, т.е. D(p) представим в виде сомножителей первого порядка. Для усиления сигнала х на отдельной частоте коэффициенты а выбираются таким образом, чтобы корректирующее устройство представляло собой последовательно включенное колебательное и апериодические звенья, т.е. 0(р) представим в виде сомножителей 2-го и 1-го порядка. Если выбором коэффициентов добиться того, чтобы 0(р) был представлен в виде произведения сомножителей второго опрядка, то устройство позволяет подчеркнуть сигнал на заданных частотах. Коэффициенты Оп полностью определяются коэффициентами передачи по входам каждого интегросумматора (по входу 1 - доэффициент К| , по входу 1 - коэффициент т.д. ) . Вопрос практической реализации тесно связан с вопросом устойчивости устройства, которое будет наиболее устойчиво, если цепи обратной связи охватывают минимально возможное число интегросумматоров. Для доказательства получаемого эффекта рассмотрим пример реализации устройства (фиг.2). Указанное устройство описывается следующей системой уравнений: V-L-V + I,; м-w K)J К.Л , . ЧЧ (7) Исходя из системы (7) выходно сигнал в операторной форме может выражен следующим образом: S/ib ibPР ЧР.. где коэффициенты к.4 - коэффицие передачи по соотве±ствующим входа Рассмотрим два случая использо ния устройства, представленного фиг. 2: 1) фильтрации сигнала X и 2) выделение - подчеркивание составляющей сигнала х заданной ч ты. 1. Пусть сигналы X и у предста ны в виде (3) и (4) , тогда у . ггд1ГЫ - г. vi.,. 1РЬ pi-4. Kl-iP - IM . гЛ- ъ-У 1Л 1-ь . Jiie (р) ,( При выборе коэффициентов 1, KIO,- н, К2. - 2г имеет вид выражение (t X X-t-L(p) т.е. полезный сигнал не имеет фа вых искажений, а корректирующее ройство воздействует только на с налы помехи ()( и ) ) Выражение для 0(р) можно пред вить в виде T(P) .) . ЧЧ если 1, то I/Dp представляет собой апериодическое звено (два последовательно включенных звена 1-го порядка). Таким образом, выбором коэффициентов K,j входной сигнал может быть отфильтрован от сигнала помехи необходимым образом при неискаженном полезном сигнале. 2. Пусть, например, сигналы х иу представлены в виде (3) и (4) и составляющая сигнала у равна нулю, тогда при 1 сигнал L(p) - в соответствии с формулой (10) - представляет собой выходной сигнал колебательного звена, подчеркивающего сигнал на резонансной частоте. Формула изобретения корректирующее устройство, содержащее последовательно соединенные п интегр осумматоров, первый вход первого из которых соединен с первым вхояом устройства, отличающееся тем, что, с целью увеличения помехозащищенности, вторые входы всех интегросумматоров соединены со вторым входом устройства, а выходы всех интегросумматоров, начиная со второго, соединены с третьим входом предыдущего интегросумматора,выход последнего интегросумматора соединен также с третьим входом этого интегросумматора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР №470789, кл. q 05 В 13/02, 04.10.73. 2.Урмаев А. С. Основы моделирования на АВМ. М., Наука, 1974, с.96100, рис. 5.5 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический фильтр | 1986 |
|
SU1388828A1 |
| Нелинейный фильтр | 1984 |
|
SU1233101A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1257605A1 |
| Фильтр низших частот для подавления резонанса контура регулирования параметра прокатки | 1983 |
|
SU1135510A1 |
| Динамический фильтр | 1991 |
|
SU1828551A3 |
| Нелинейное изодромное корректирующее устройство | 1978 |
|
SU767699A1 |
| Динамический фильтр в релейных системах управления | 1991 |
|
SU1836656A3 |
| Импульсное регулирующее устройство | 1985 |
|
SU1267358A1 |
| Входное устройство регулятора | 1973 |
|
SU470789A1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1137442A1 |