f
Изобретение относится к элементам систем автоматики и может быть использовано в качестве корректирующего звена в системах автоматического управления различного назначения.
Наибольшее применение изобретение может найти для целей подавления сигналов, описываемых кусочно-целыми функциями, т.е. функциями, которые на интервале непрерывности их производных описываются уравнениями вида:
+ а,t +,
1
+ а t
h Подавление сигналов, описываемых кусочно-целыми функциями, используется в различных нелинейн,1х системах., например такой сигнал возникает при измерении периодического непрерывного сигнала с помощыо датчика, имеющего люфт.
Цель изобретения - увеличение точности передачи полезного сигнала при расширении полосы пропускания фильтра.
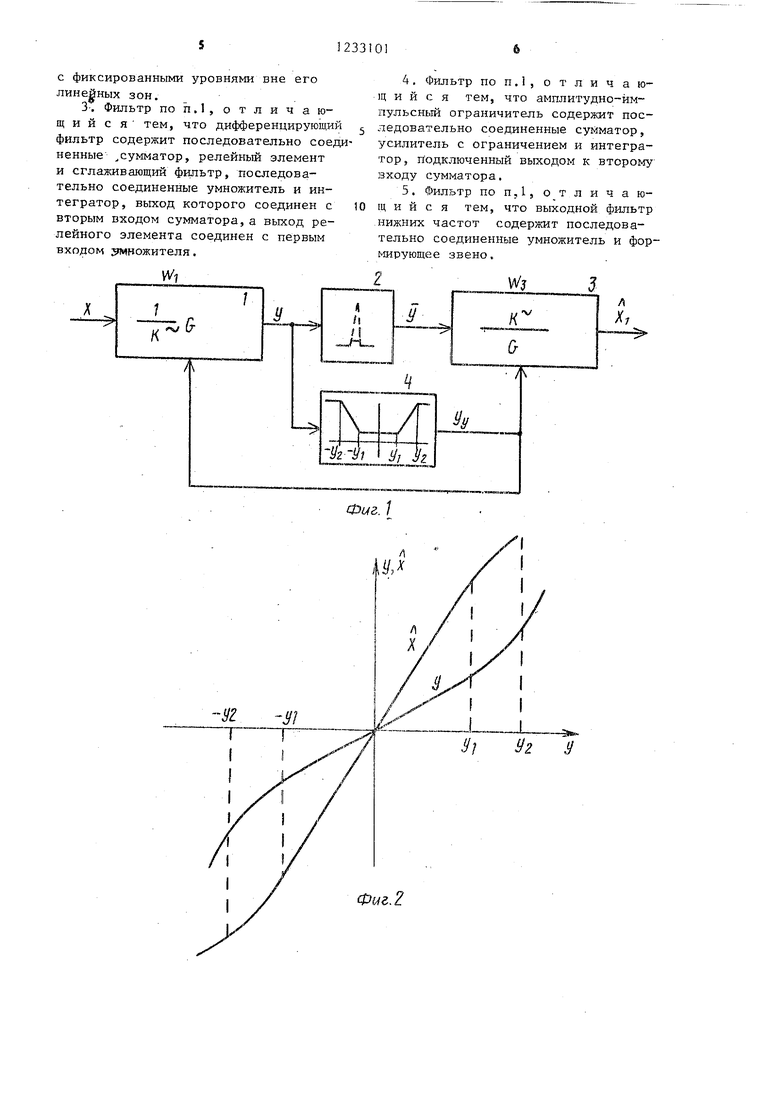
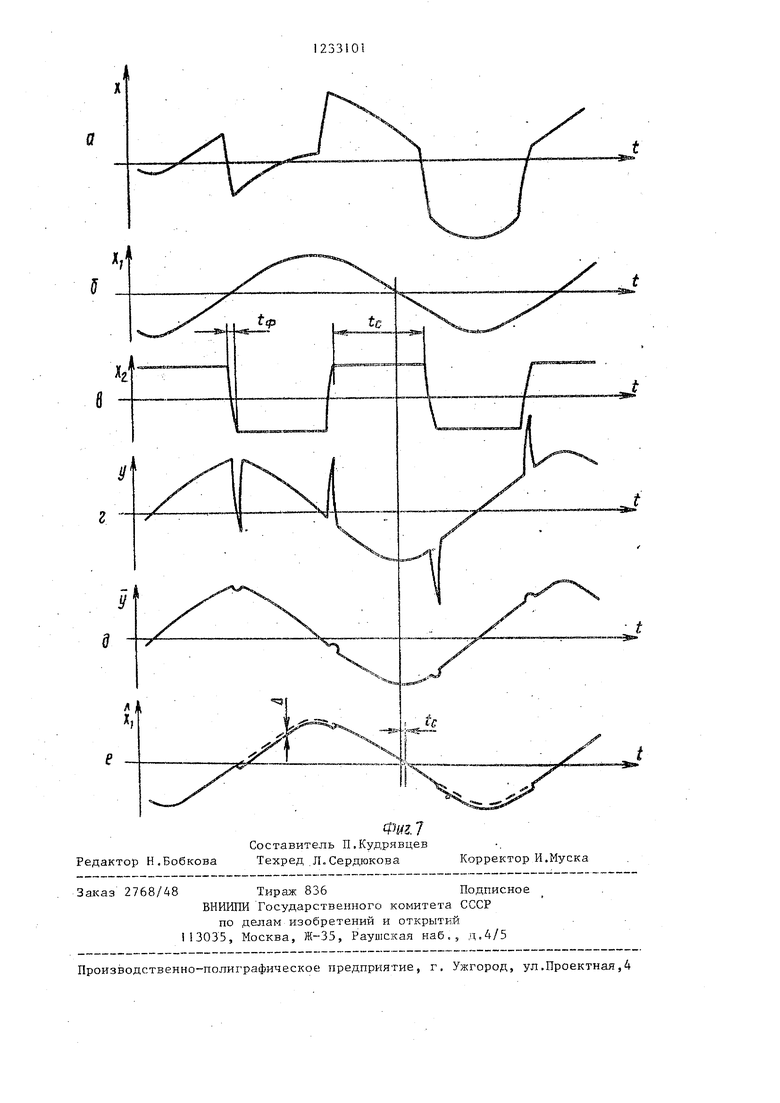
На фиг. 1 приведена структурргая схема фильтра; на фиг. 2 - зависимость сигналов Y и X от выходнот о сигнала дифференцирующего фильтра; на фиг. 3 схема дифференцирующего фильтра; на фиг. 4 - схема амплитудно-импульсного ограничителя; на фиг,5 - схема выходного фильтра ниж- них частот; на фиг.6 - соотноп/ение полосы пропускания полезного .сигнала . в известном (а) и предлагае1У1ом (S) фильтрах; на фиг. 7 - диаграммы работы фильтра.
Фютьтр содержит дифференцирующий фильтр 1, амплитудно-импульсный рг- раншитель 2,, выходной фильтр 3 нижних частот и блок 4 управления настройкой. Блок 4 представляет собой функциональный преобразователь :; может быть выполнен, в частности, в виде схемы выделения абсолютного значения сигнала с фиксированньп 1и уровнями вне его линейных зон.
Дифференцирующий фильтр 1 содержит первый сумматор 5, релейный элемент 6, С1 лаживающий фильтр 7, первый умнол(итель 8 и первый интегратор 9 .
Амплитудно-импульсный огранили- тель 2 состоит из второго сумматора 10, усилителя 11 с огран.ичением .и второго интегратора 12.
Выходной фильтр 3 нижних частот состоит из второго умножителя 13 и формирующего звена 14.
Фильтры 1 и 3 имеют близко вза- 5 имно обратные передаточные функции.
Порядок оператора G выбирается исходя из области применения устройства.. В частности, нри использовании его в качестве нелинейного фильтра SO оператор G имеет преимущественно первый порядок (редко второй). При использовании нелинейного фильтра в качестве устройства подавления ку- (1) сочно-непрерывных сигналов порядок
15 оператора G выбирается таким образом, что на выходе фильтра 1 подавляемый сигнал на участках непрерывности его производных преимущественно обращается; в ноль.
20 . Рассмотрим работу фильтра при действии на его входе сигнала X (фиг. 7а), представляющего собой сумму полезного сигнала X (фиг.76) и аддитивного сигнала помехи X .15 (фигЛв).
Рассмотрим наиболее сложный для фильтрации случай, когда период следования полезного сигпала (для определенности примем Х Л SiniJt) и 30 период следования сигнала помехи,
опис ываемого- выражением (1) на участках непрерывности его производных, совпадают. Пусть также (как наиболее сложный случай разделения сигналов) 2,j совпадают амплитуды полезного сигнала и сигнала помехи.
В этом случае задачей, решаемой нелинейным фильтром, является выделение полезного сигнала Х, с мини- ..40 мальмыми искажениями.
Е ;;ли блоки нелинейного фильтра конструктивно выполнены по схемам (фиг.З - 5)5 то он способен подав- .лять сигналы, которые на интервалах 45 t-. (t|. 1 5 фиг.7в) описываются уравнением
а на интервалах t уравнением
.X
1ср
t а + а t,
(2)
(3)
55
либо другим, более высокого порядка,
Передаточные функпии фильтров 1 и 3 имеют соответственн о вид:
Р +
(4)
(2)
а на интервалах t уравнением
.X
1ср
t а + а t,
(3)
55
либо другим, более высокого порядка,
Передаточные функпии фильтров 1 и 3 имеют соответственн о вид:
Р +
(4)
к
3
p
Если входной сигнал устройства имеет вид
X
Х,+ X,,
где Х А SiniJt, а Х - определяется выражениями (2) и (3), то при
малых t и t,,
Y - кCosJt + (t),
где сигнал i (t)
dxi dt
имеет фор
му импульсов, возникающих вследствие дифферендирования фронтов сигнала
X (фиг.Уг). 2
Фильтром обеспечивается значительное подавление компоненты (t) сигнала Y. Такое подавление основано на Нелинейном разделении сигналов по частоте. Частотное разделение обеспечивается блоком 4, являющимся апериодическим звеном с постоянной времени, достаточной для прохождения полезного сигнала, если выходной сигнал сумматора 10 находится в пределах линейной зоны усилителя 11. При появлении сигнала (t) сигнал выходит за пределы линейной зоны усилителя 11, т.е. происходит ограничение сигнала 1 (t) на уровне полки усилителя 11.
Сигнал Y восстанавливается фильтром 3, который имеет передаточную функцию, обратную передаточной функции фильтра 1 , в сигнал, соответст- вующий полезной компоненте Х сигнала X. Погрешность S восстановления зависит от точности выполнения соотношения :
W. W
2.-W.
где W,rt - передаточная функция ли- йейной части блока 4, и от качества подавления сигнала (t) . Эта погрешность определяется фазовыми искажениями (сдвигом tc) и амплитудными искажениями Д .
Фазовые искажения коррекцией параметров звена 14 (фиг.5) могут быть практически полностью устранены. Амплитудные искажения зависят от конкретного выполнения блока 2. При
(5)
12331014
выполнении блоков 1 - (фиг. 3-5) удается решность
5
S-/л -t
0,08.
Параметры блока 4 выбираются с учетом следующих требований.
При изменении сигнала Y в диапаЮ зоне - Y d Y ь Y
линейная харак15
20
25
5
5
0
5
теристика фильтра 1 должна использоваться возможно полным образом, не менее чем на 80 - 90%. Уровень полотс характеристики блока 4 выбирается из расчета минимальных искажений спектра полезного сигнала и максимального подавления сигнала помехи.
Если сравнить линеаризированные амплитудно-частотные характеристики (в относительных единицах) известного устройства (фиг.ба) и предлагаемого (фиг.бб), то видно, что при малых К, пропорциональных значению Yy ( - Y Y Y), полоса пропускания устройства минимальная, при Y 1 Y,. полоса пропускания расширяется от значения f до значения f 2 .
При К фильтр пропускает
малые/ амплитуды полезного сигнала при эффективном подавлении сигнала помехи, при увеличении К(когда растет, например., амплитуда сигналах) становится возможным увеличить полосу пропускания фильтра без ухудшения его точностных характеристик.
Формула изобретения
1. Нелинейный фильтр, содерхсащий последовательно соединенные дифференцирующий фильтр, амплитудно-импульсный ограничитель и выходной фильтр нижних частот, отличающи й- с я тем, что, с целью увеличения точности передачи полезного сигнала при расширении полосы пропускания фильтра, в него введен блок управления настройкой, вход которого подключен к выходу ди4)ференцирующего фильтра, а выход соединен с унравляю- щими входами дифференцирующего фильтра и выходного фильтра нижних частот.
2. Фильтр по п.1, о т л и ч а ю- щ и и с я тем, что блок управления настройкой выполнен в виде схемы вы- 1деления абсолютного значения сигнала
с фиксированными уровнями вне его
линейных зон,
3-. Фильтр по п. 1 , о т л и ч а ю- щ и и с я тем, что дифференцирующий фильтр содержит последовательно соединенные сумматор, релейный элемент и сглаживающий фильтр, последовательно соединенные умножитель и интегратор, выход которого соединен с вторым входом сумматора,а выход релейного элемента соединен с первым входом змвожителя.
4,Фильтр поп.1,отличаю- щ и и с я тем, что амплитудно-йм- пульснЕот ограничитель содержит последовательно соединенные сумматор, усилитель с ограничением и интегратор, п одключенный выходом к второму входу сумматора.
5.Фильтр поп,1,отличаю- щ и и с я тем, что выходной фильтр .нижних частот содержит последовательно соединенные умножитель и формирующее звено,
Фб/г. /
Фиг. 2
Ь„ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный фильтр | 1983 |
|
SU1124245A1 |
| Устройство для импульсно-фазового управления преобразователем | 1983 |
|
SU1094127A1 |
| Устройство для измерения температуры | 1984 |
|
SU1216670A1 |
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР КВАДРАТУРНЫХ СИГНАЛОВ | 2014 |
|
RU2551824C1 |
| ВОЗБУЖДЕНИЕ ПАРАМЕТРИЧЕСКИХ ГРОМКОГОВОРИТЕЛЕЙ | 2011 |
|
RU2569914C2 |
| Устройство для приема сигналов с частотно-фазовой модуляцией | 1988 |
|
SU1518915A2 |
| Динамический фильтр | 1986 |
|
SU1388828A1 |
| Система управления | 1984 |
|
SU1211688A1 |
| Устройство приема сигналов с частотным разделением каналов | 1988 |
|
SU1626410A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1257605A1 |
Изобретение относится к области нелинейной фильтрации и предназначено для подавления шумов, описываемых кусочно-целыми функциями. Цель изобретения состоит в повышении точности передачи полезного сигнала при одибБременном расширении полосы пропускания. Для этого в фильтр введен блок управления настройкой , который может быть выполнен в виде схемы выделения абсолютного значения сигнала с фиксированными уровнями вне его нелинейных зон. Блок управления настройкой управляет работой входного дифференцирующего фильтра и выходного восстанавливающего фильтра низких частот. Для исключения больших амплитут сигнала на входе восстанавливающего фильтра ,низких частот, между его входом и выходом дифференцирующего фильтра установлен амплитудный импульсный ограничитель. 4 з.п. ф-лы, 7 ил. § (Л гчэ со со
а
Редактор Н.Бобкова
. 7
Составитель П.Кудрявцев Техред .Л.Сердгокова Корректор И.Муска
Заказ 2768/48 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж--35, Раушская наб. , д.4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул,Проектная,4
| Нагрузочное устройство для испытания электрической машины | 1986 |
|
SU1404988A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| , | |||
