I
Изобретение относится к области сельскохозяйственного машиностроения и может найти применение в хлолкоуборочпых машинах.
Известна многорядная хлопкоуборочная машина, содержагцая блок аппаратов, рычажный механизм навески аппаратов с системой автоматического копировапия рельефа грядок по высоте и реактивные тяги, paaMeiueHHHe между рамой машины и блоком анпа|)атов.
Недостатком этой машины является то, что .при незпачительпой потере устойчивости и при колебаниях в поперечном относительно г)ядок нанравлении не обеспечивается стабильное ноложение рабочей щели хлопкоуборочных аппаратов относительно кустов хлопчатника, что приводит к снижению агротехнических показателей машины и увеличению |готерь хлопка при машинном его сборе.
С целью повышения полноты сбора хлопка путем обеспечепия во время работы стабильного положения рабочей шели уборочного аннарата относительно кустов хлопчатника 1редлагаемая машина имеет двухшарнирный поводок, соединенный одним коицом с блоком аппаратов, а другим - с рычагом механизма навески, н смонтированные па каждом блоке стабилизаторы его положепия, оси которых расположены в поперечной плоскости машины симметрично относительно оси поводка, при этом каждый стабилизатор имеет регулируемую винтовую пару, блок аппаратов снабжен опорными полозка ми, а конец тяги, соединенный с рамой машины, подпружинен.
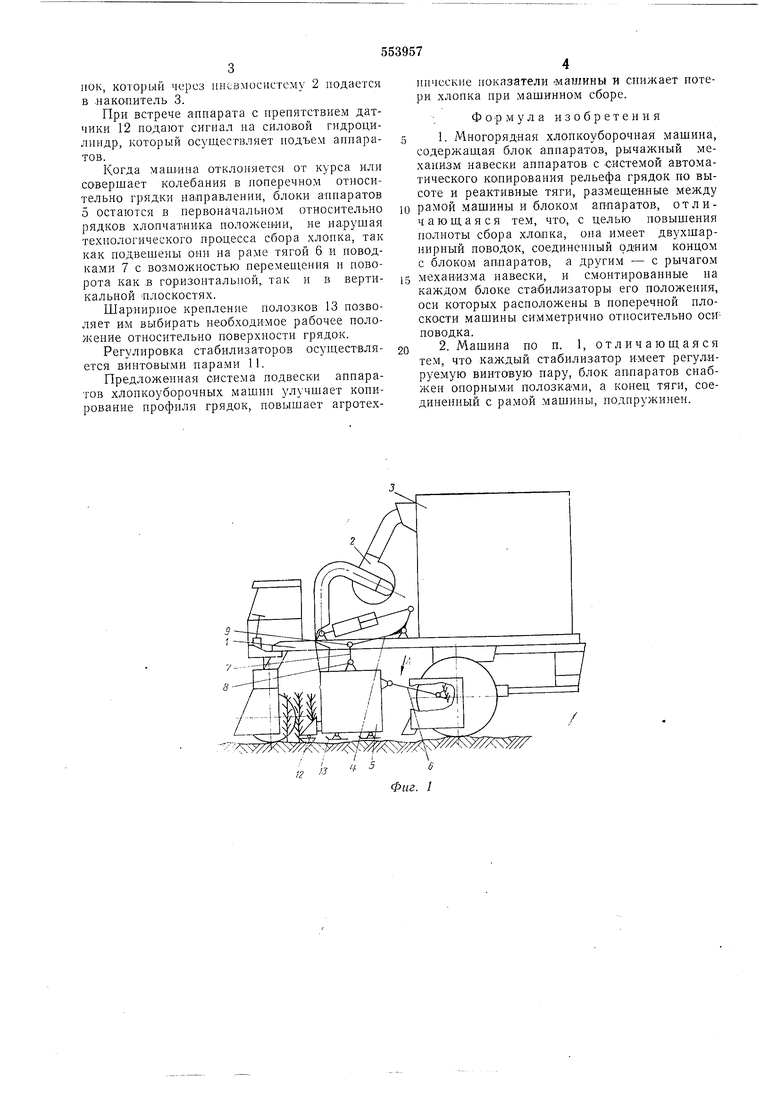
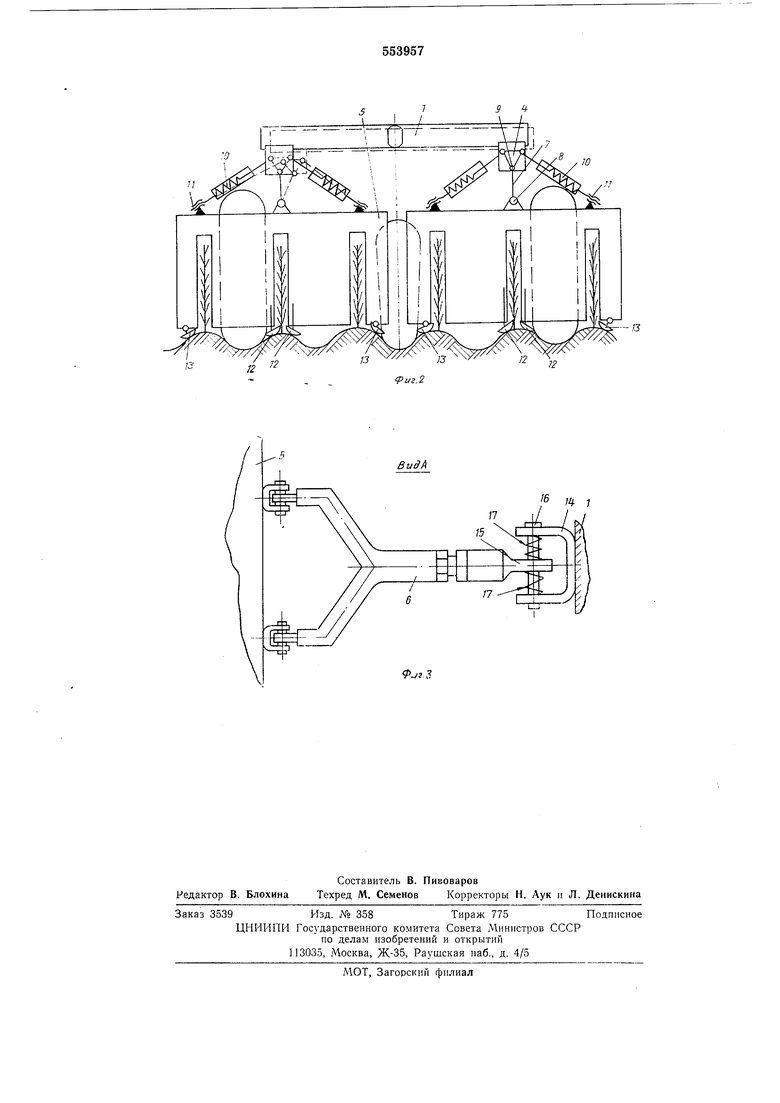
На фиг. 1 показана нредложенная хлопкоуборочная машина; па фиг. 2 - механизм павески блоков аппаратов; иа фиг. 3 - вид Л на фиг. 1.
На раме 1 хлопкоуборочной машины установлена нневмотрапспортная система 2 с накопителем 3 хлопка. На двунлечпх рычагах 4 механизма навески подвешены блоки аппаратов 5, соединенные с рамой реактивной тягой 6. Каждый блок соединен с одним из конпов двухшар.нирного поводка 7, с шарнирами 8 и 9, другой конец этого поводка соединен с рычагом 4 механизма навески. На каждом блоке смонтированы стабилизаторы 10 его положения, каждый из которых Имеет регулируемую винтовую пару 11, осп стабилнзаторов расположены в полеречной плоскости симметрично относительно оси новодка 7. Аппараты имеют датчики 12 автоматического копирования рельефа грядок. Блок аппаратов снабжен опорными нолозкамп 13, 5 а реактивная тяга 6 имеет вилку 14, поводок 15, палец 16 н пружины 17, удержпваюпи1е тягу в среднем положении.
При работе уборочные аппараты
копируют профиль грядки, пропуская кусты
хлопчатника через рабочие П1,елн, снимая хлоjiOK, который через инсвмосистему 2 подается в .накотштель 3.
При встрече аппарата с препятствием датчики 12 подают сигнал на силовой гидроцилиидр, который осуществляет нодъем аппаратов.
Когда маш.ина отклоняется от курса или совершает колебания в поперечном относительно грядки направлении, блоки апиаратов 5 остаются в первоначальном относительно рядков хлопчатника положении, не нарушая технологического процесса сбора хлопка, так как подвешены они на раме тягой 6 и поводками 7 с возможностью перемеп1,ення и поворота как в горизонтальной, так и в вертикальной ПЛОСКОСТЯХ.
Шарнирлюе крепление полозков 13 позволяет им выбирать необходимое рабочее положение относительно поверхности грядок.
Регулировка стабилизаторов осуществляется винтовыми парами 11.
Предложенная система подвески аппаратов хлопкоуборочных машин улучшает кодирование профиля грядок, повышает агротехнические показатели машины и снижает потери хлопка ири машинном сборе.
Формула изобретения
1. Многорядная хлопкоуборочная машина, содержащая блок аппаратов, рычажный механизм навески аппаратов с системой автоматического копирования рельефа грядок по высоте и реактивные тяги, размещенные между
рамой машины и блоком аппаратов, отличающаяся тем, что, с целью повышения полноты сбора хлопка, она имеет двухшарнириый поводок, соединенный одним концом с блоком аппаратов, а другим - с рычагом
механизма навески, и смонтированные на каждом блоке стабилизаторы его положения, оси которых расположены в ноперечной плоскости машины симметрично относительно осиповодка.
2. Машина по п. 1, отличающаяся тем, что каждый стабилизатор имеет регулируемую винтовую пару, блок аппаратов снабжен опорными полозка-ми, а конец тяги, соеиненный с рамой машины, подпружинен.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многорядная хлопкоуборочная машина | 1977 |
|
SU680682A2 |
| Устройство для блоков навески аппаратов уборочной машины | 1989 |
|
SU1657096A1 |
| Механизм подвески аппаратов многорядной уборочной машины | 1977 |
|
SU743623A1 |
| Механизм навески аппаратов многорядной хлопкоуборочной машины | 1978 |
|
SU778724A1 |
| Способ дефолиации хлопчатника и устройство для его осуществления | 1989 |
|
SU1727762A1 |
| Механизм подвески аппаратов многорядной уборочной машины | 1975 |
|
SU572240A1 |
| Хлопкоуборочный аппарат | 1976 |
|
SU633507A1 |
| Механизм навески блока аппаратовХлОпКОубОРОчНОй МАшиНы | 1979 |
|
SU820717A1 |
| Многорядная хлопкоуборочная машина | 1986 |
|
SU1407418A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ РЕЛЬЕФА ГРЯДКИ РАБОЧИМИ АППАРАТАМИ | 1972 |
|
SU352617A1 |
12 /
6
Фиг. 1
9
В ид A
г,
