(54) МЕХАНИЗМ РЕГУЛИРОВКИ РАБОЧЕЙ ЩЕЛИ ВЕРТИКАЛЬНО-ШПИНДЕЛЬНОГО ХЛОПКОУБОРОЧНОГО
1
Изобретение относится к области сельскохозяйственного машиностроения.
По основному авт. св. № 799690 известен механизм регулировки рабочей щели вертикально-шпиндельного хлопкоуборочного аппарата, содержащий смонтированные; на каркасе стянутые пружинами две подвижные рамки, имеющ,ие выступы с роликами, Контактирующими с кулачками повйротного вала, и пару направителей, смонтированных на каркасе в передней и задней его частях по направлению перемещения аппарата перпендикулярно продольной плоскости его симметрии, а каждая рамка.снабжена по меньшей мере парой . катков, установленных с возможностью перемещения по напрааителям, при этом вал установлен между рамками вдоль плоскости их симметрии. Привод вала выполнен червячным.
Недостатком этого механизма, как и серийного хлопкоуборочного аппарата, является то, что регулируемая величина рабочей щели постоянна по всей высоте шпиндельных барабанов, т. е. оси противостоящих барабанов всегда параллельны. В связи с тем, что объем растительной массы куста хлопчатника в нижнем ярусе больше, чем в верхнем.
АППАРАТА
В процессе работы аппарата с параллельными щелями нижняя часть шпинделей покрывается более толстым слоем зелени. Кроме этого, обжим и обработка куста по всей его длине происходит неравномерно, в результате чего возможны случаи повреждения куста, сбивание коробочек и зеленого курака (особенно в нижнем ярусе) и неполный сбор урожая с верхних частей кустов хлопчатника.
Все эти факторы приводят к снижению аг10ротехнических и качественных показателей работы хлопкоуборочной машины.
Целью изобретения является повышение агротехнических и качественных показателей работы машины за счет обеспечения копировки строения куста хлопчатника рабо15чей щелью хлопкоуборочного аппарата, а также повышение надежности работы машины.
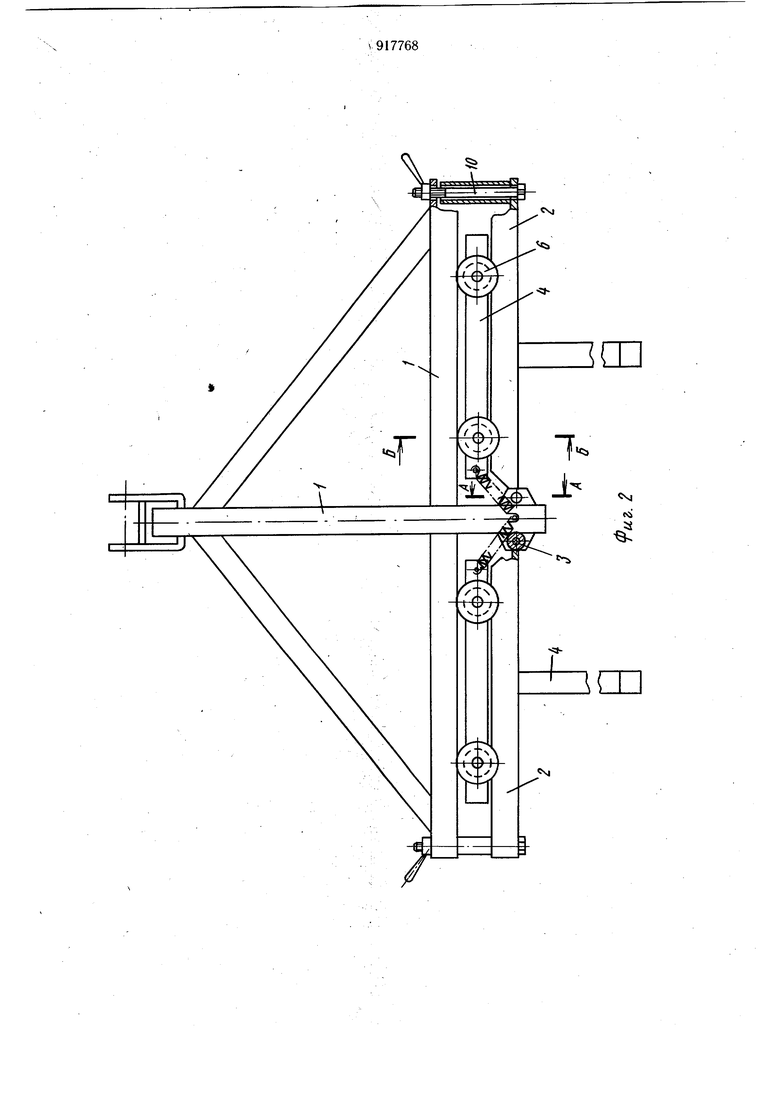
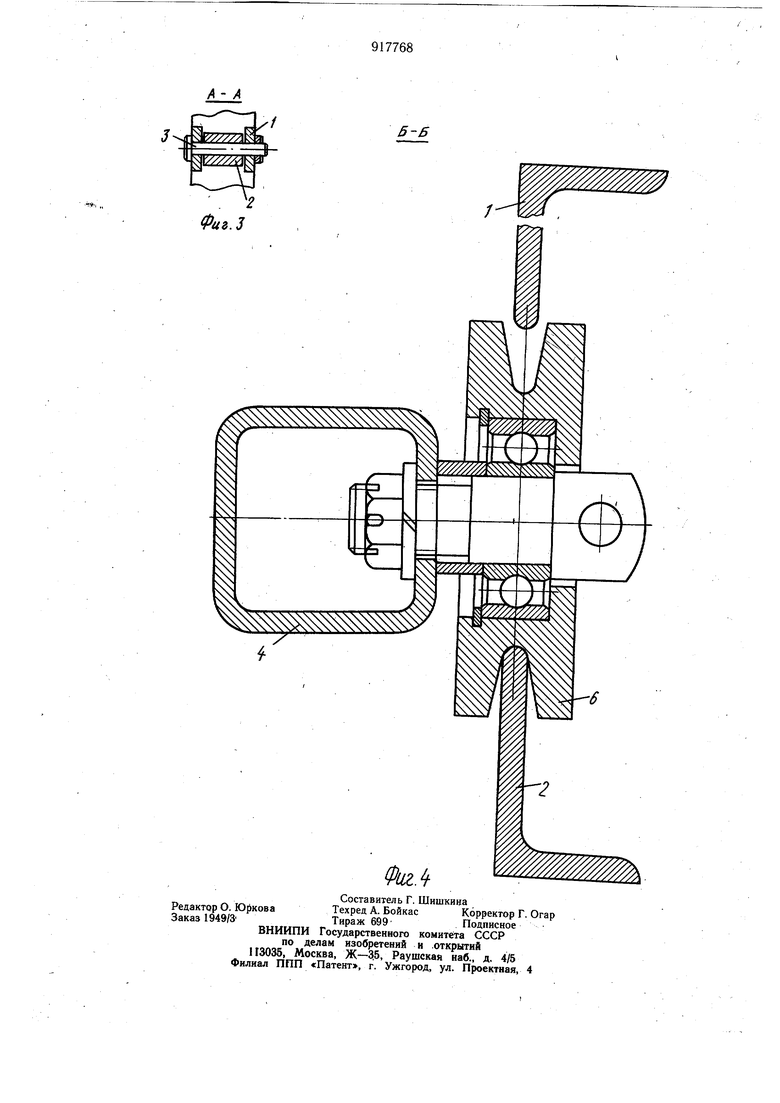
Для этого в предлагаемом механизме ре2Q гулировки рабочей щели вертикально-щпиндельного хлопкоуборочного аппарата каждый направитель выполнен в виде пары планок, каждая из которых шарнирно смонтирована одним концом на каркасе и имеет средство изменения угла ее наклона относитель291но продольной плоскости симметрии .механизма, связывающее свободный конец планки с каркасом аппарата. Средство изменения угла наклона каждой планки выполнено в виде регулировочного винта. На фиг. 1 схематично представлен механизм регулировки, вид спереди; на фиг.. 2 - направлнтели; на фиг. 3 - разрез А-А фиг. 2; на фиг. 4 - разрез Б-Б фиг. 2. Механизм регулировки содержит смонтированные на каркасе 1 направители 2, каждый из которых выполнен в виде двух планок, установленных на каркасе посредством шарнира 3, и подвижные подпружиненные рамки 4, несущие щпиндельные барабаны 5, причем подвижные рамки 4 смонтированы на направителях 2 посредством катков 6 и имеют выступы с роликами 7, которые взаимодействуют с кулачками 8 поворотного вала 9. Планки направителя 2 имеют средство изменения угла их наклона относительно продольной плоскости симметрии механизма, выполненная, например, в виде регулировочного винта 10, связывающего противоположный щарнирному закреплению конец планки с каркасом аппарата. При работе хлопкоуборочной машины регулировку рабочей щели хлопкоуборочного аппарата осуществляют в процессе сбора хлопка в зависимости от урожайности с места механика-водителя (аналогично известному механизму). Перед началом сбора урожая производят регулировку формы рабочей щели и прида &Г
иг. 1 ЮТ ей конусную форму, для чего планки направителей 2 перемещают по вертикали с помощью регулировочных винтов 10. Технико-экономическая эффективность предлагаемого механизма ,регулировки рабочей щели заключается в повыщении агротехнических качественных показателей и надежности работы хлопкоуборочной машины. Формула изобретения 1.Механизм регулировки рабочей щели вертикально-шпиндельного хлопкоуборочного аппарата по авт. св. № 799690, отличающийся тем, что, с целью повышения эффективности сбора хлопка путем копирования куста хлопчатника, каждый направитель выполнен в виде пары планок, каждая из которых щарнирно смонтирована одним концом на каркасе и имеет средство изменения угла ее наклона относительно продольной плоскости симметрии механизма, связывающее свободный конец планки с каркасом аппарата. 2.Механизм по п. 1, отличающийся, тем, что средство изменения угла наклона каждой планки выполнено в виде регулировочного виНта. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 799690, кл. А 01 D 46/14, 1979.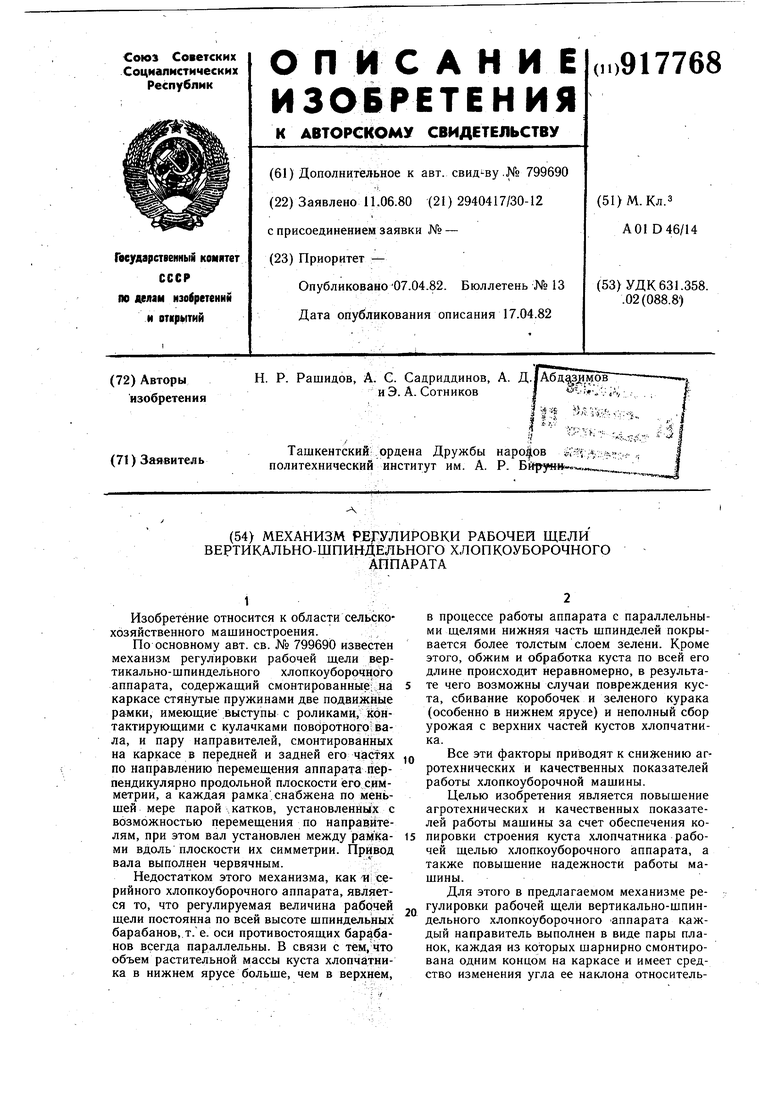
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм регулировки рабочей щели вертикально-шпиндельного хлопкоуборочного аппарата | 1983 |
|
SU1115675A2 |
| Приспособление для улавливания хлопка к хлопкоуборочному аппарату | 1979 |
|
SU856405A1 |
| Хлопкоуборочный аппарат | 1972 |
|
SU471880A1 |
| Механизм регулировки рабочей ще-ли ВЕРТиКАльНО-шпиНдЕльНОгО ХлОпКО-убОРОчНОгО АппАРАТА | 1979 |
|
SU799690A1 |
| Механизм подвески вертикально- шпиНдЕльНОгО ХлОпКОубОРОчНОгОАппАРАТА | 1979 |
|
SU826990A1 |
| Хлопкоуборочный аппарат | 1982 |
|
SU1140708A1 |
| Хлопкоуборочный аппарат | 1980 |
|
SU880325A1 |
| Хлопкоуборочный аппарат | 1982 |
|
SU1101195A2 |
| ХЛОПКОУБОРОЧНЫЙ АППАРАТ | 1970 |
|
SU284491A1 |
| Приспособление к хлопкоуборочному аппарату | 1975 |
|
SU715053A1 |