.чем 11, расположенным на ползуне 10. Таким же образом расположенные на опоре 4 винт 17 и гайка 18, управляющие шаговым двигателем 12, служат для перемещения ползуиа 10. На каждом ползуне укреплены две трубки 19 для телескопического взаимодействия с двумя отверстиями 20 в ползуне 10 и пластине 21 соответственно, и каждая имеет пружину 22, служащую для устранения люфта между -винтом и гайкой лостоянио в одном направлении. Ползуны 9 и 10, кроме того, имеют выступы 23, которые служат для их остановки, например, при помощи микровыключателей (на чертеже не показаны), и для установки Нулевой позиции щаговых двигателей 11 и 12.
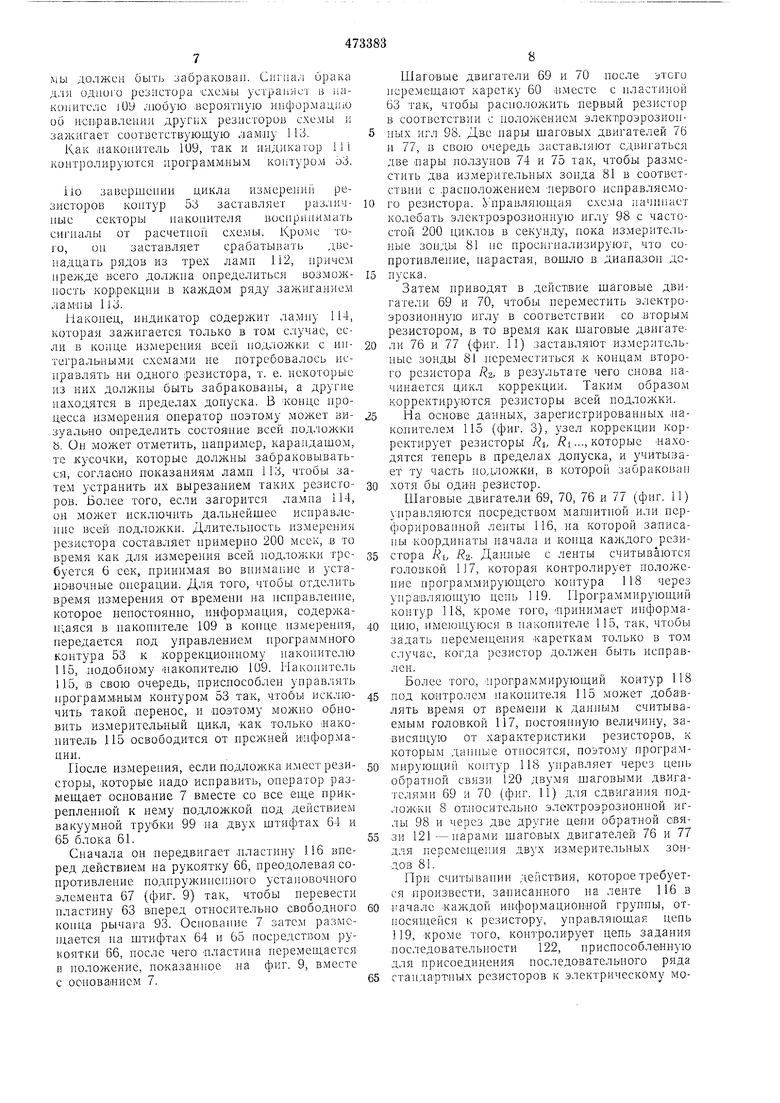
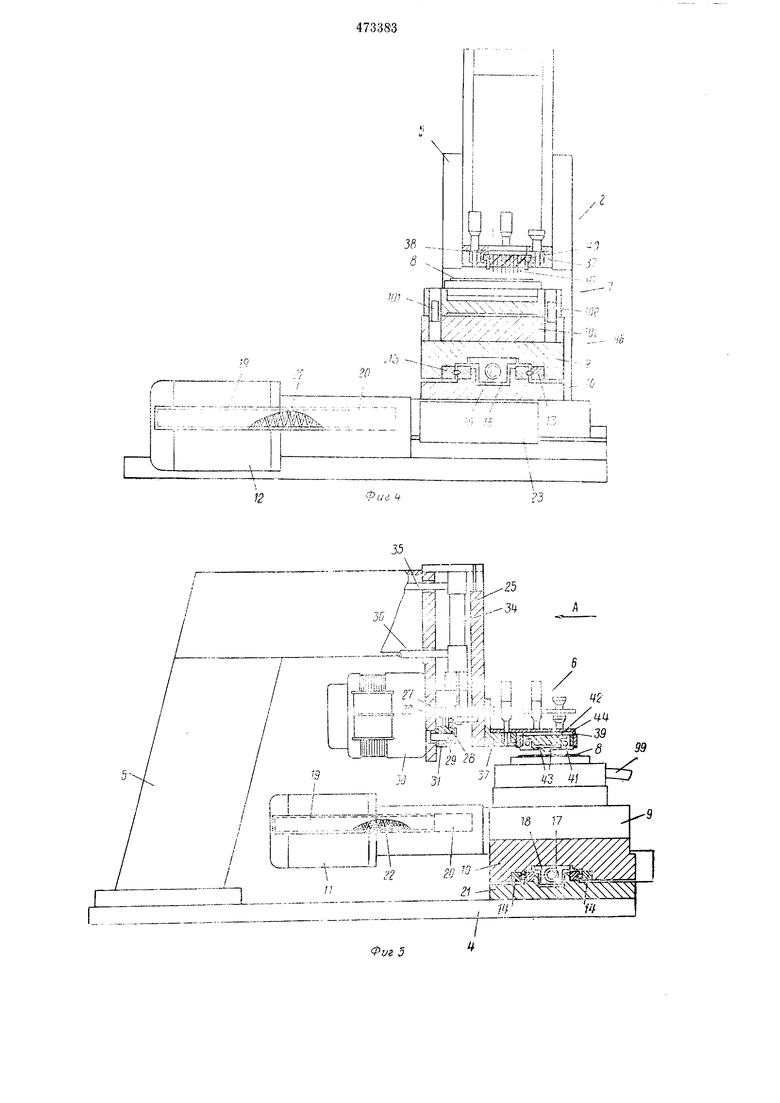
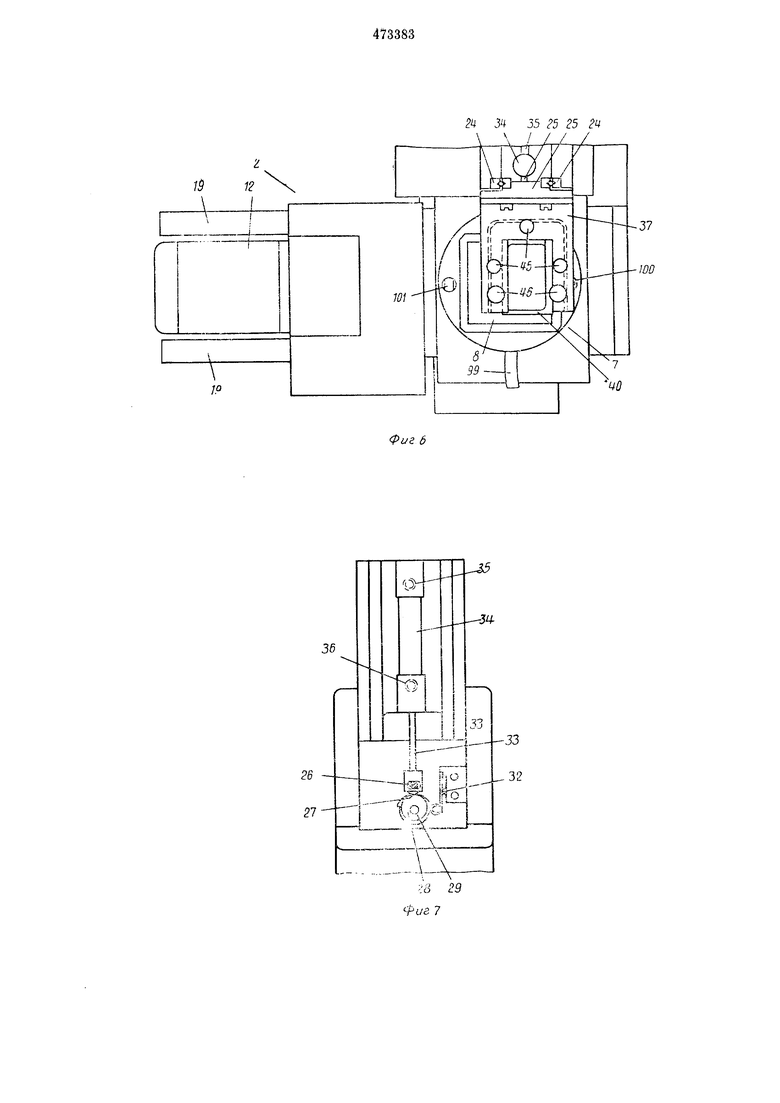
По двум V-образным иаправляющим 24 «а опоре 4 чувствительного прибора перемещается измерительная каретка 25. На каретке закреплен щтифт 26, «есущий вращающийся ролик 27, который взаимодействует с эксцентриком 28, закрепленным на валу 29 тормозного электродвигателя 30, являющегося приводом. Эксценприк 28 (Вьшолпен за одно целое с кулачком 31, служащим для включения микровыключателя 32.
Штифт 26 соединен со стержнем 33 гидравлического цилиндра двойного действия 34, приводимого в работу через два трубопровода 35 и 36.
На .нижней части каретки 25 (фиг. 5) закреплен V-образный кронщтейн 37 с возможностью его регулировки по высоте. Концы кронштейна снабжены призматическими .направляющими 38, ,на которых может быть помещен измерительный инструмент 39.
В прямоугольной металлической рамке 40 измерительного инструмента размещено несколько пар измерительных зондов 41, встроенных в изоляционное основание 42. Каждый зонд имеет контактное ост;рие 43 и рычаг 44, не покрытый изоляционным материалом, к которому припаян проводник (на чертеже «е показан).
Зонды 41 размещены s таком положении, что астрия 43 каждой пары находятся в положениях, соответствующих местонахождению двух концов резисто:ров Ri, Rz, подлежащих проверке. Острия .различных пар зондов таким образом воспроизводят размещение резисторон интегрального контура подложки 8.
Инструмент 39 вставляют в направляющие 38. Три эксцентричных штыря 45 служат для регулировки положения инструмента, после чего последний стонорят двумя фиксирующими винтами 46.
Проводники, припаявные к зондам 41, соединены с коммутатором 47 (фиг. 3). Проводники коммутатора соединены с измерительным мостом 48 для измерения со.противлений Ri, Ri интегральной схемы через группу переключателей 49, которые могут последовательно замыкаться. Через вторую группу переключателей 50 к измерительному мосту 48 может подсоединяться вторая группа проводнико1В,
подведенных через коммутатор 51 к группе образцовых сопротивлений RCi, .-RCizИзмерительный мост контролируется с одной сторопы схемой последовательного включения 52, подающей на измерительный мост 48 для измерения каждого сопротивления такое напряжение, которое соответствует номинальному сопротивлению резистора. Таким образом рассеивание тока на сопротивлениях сводится к минимуму, и измерения поддерживаются в пределах нужной чувствительности.
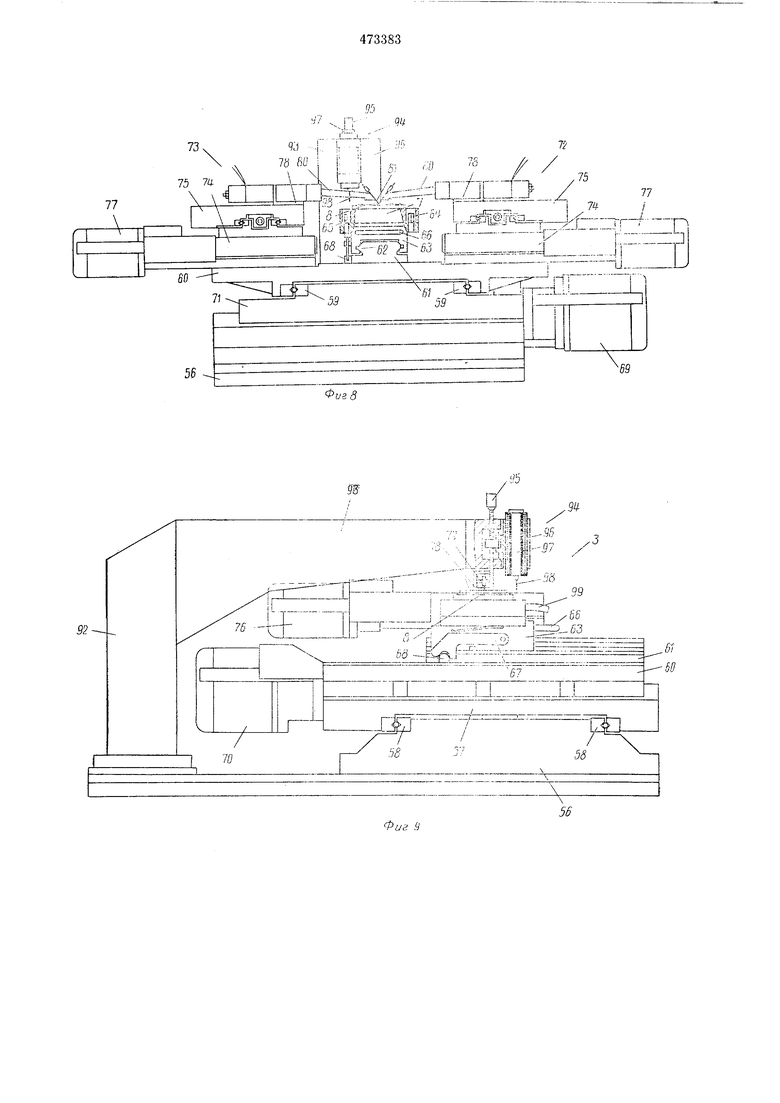
Схема 52 соединена с программным контуром 53, задающим программу целого цикла различных операций с подложкой 8. В частности, контур 53 служит для выполнения последовательных стадийных команд под действием сигнала, даваемого микровыключателем 32 (фиг. 5), и приспособлен для управления считывающим накопителем 54, .программирующим расположение подложки, в котором записаны координаты проверяемых резисторов, всегда занимающих одну и ту же часть на подложке для любого элемента схемы. Считывающий накопитель 54 служит для последователыного считывания пары координат и управления через цепь обратной связи 55 двумя щаговыми двигателями 11 и 12 с целью передвижения ползунов 9 и 10 от одного резистора к другому. Механизм 3 электроэрозионного удаления лленки резистора и узел коррекции содержит опорную пластину 56, слулсащую для перемещения каретки 57 в шариковых направляющих 58. На этой каретке может перемещаться в щариковых направляющих 59 вторая каретка 60, «а которой расположен блок 61.
Блок 61 имеет две призматические направляющие 62, по которым может скользить пластика 63 с двумя штифтами 64 и 65, приспособленными для установки на пих опоры 7 уже замеренной подложки 8.
Для установки пластины 63 на направляющие 62 и снятия с -них служит рукоятка 66. Пластина, кроме того, снабжена подпружиненным установочным элементом 67, приспособленным для взаимодействия с зафиксированным упором 68, служащим для фиксации пластины 63 в рабочем положении.
Шаговые двигатели 69 и 70, аналогичные шаговым двигателям 11 и 12, служат для пеперемещения кареток 60 и 71, управляемых при помощи программного контура 53.
На каретке 60, кроме того, смонтированы два скользящих узла 72 и 73, каждый из которых состоит из двух ползунов 74 и 75, скользящих во взаимно перпендикулярных направлениях и управляемых соответствующими шаговыми двигателями 76 и 77, подобными шаговым двигателям 11 и 12.
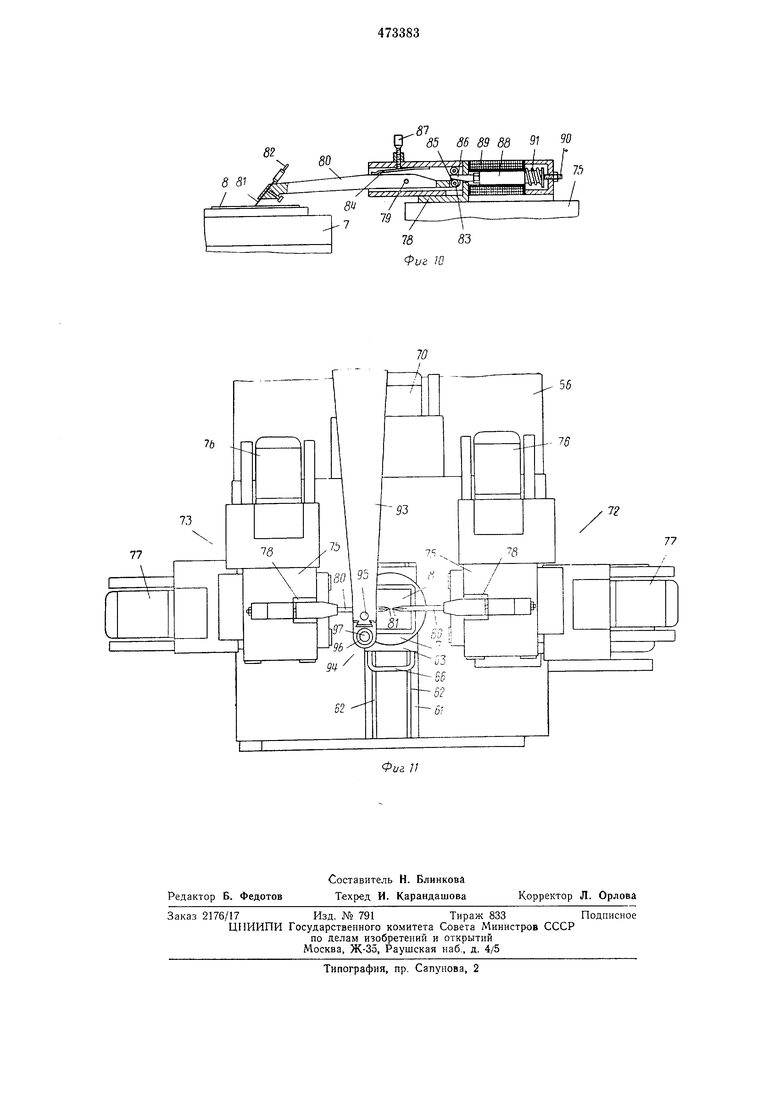
На каждом ползуне 75 закреплена опора 78, несущая штифт 79, на котором крепится рычаг 80. К одному концу рычага крепится измерительный зонд 81 из проводящего материала, присоединенный к электропроводнику 82. Другой его конец несет ролик
83, 110рмально прижатый плоской пружиной 84 к лаклонной поверхности 85 стержня 86. Для регулироВКи пружины служит :ВШ1Т 8/. Стержень прикреплен к цилиндрическому якорю 88 электромагаита 89 и «ормально прижат к упору 90 пружиной сжатия 91. Узел коррекции, кроме того, имеет стойку
92(фиг. 9), прикреплеппую к опорной пластине 5Ь, несущую рычаг 93. На конце рычага
93закреплена опора 94, которая может регулироваться в вертикальном направлении винтом 95. К опоре 94 прикреплен электромагнит 96, к якорю 97 которого прикреплена,
в свою очередь, электроэрозионашя игла 98. Под действием собственной тяжести якорь 97 нормально находится в иижнел положении так, что он опирается на подложку 8.
В нерабочем положении масло под давлением подается в трубопровод 36 (фиг. 5), и измерительная каретка 25 удерживается гидра;вличеоким цилиндром 34 в врехпем положении, показанном на чертеже.
После размещения подложки 8 па основании 7 последнее вместе с вакуумной трубкой 99 помещается на штифты 100 и 101 (фиг. 6) пластины 102 измерительного блока 2.
Контроль резисторов включает операцию измерения каждого кусочка пленки резистора, занесенного на подложку 8.
При включении устройства поток масла подается в трубопровод 35, в результате чего цилиндр 34 прижимает ролик 27 к эксцептрику 28, как показано на чертеже. Ползуны 10 располагаются в исходном положении при помощи выступов 23. В этом положении измерительный инструмент 39 располагается в соответствии с расположением первого резистора па подложКе 8.
Вал 29 тормозного электродвигателя 30 (фиг. 5) поворачивается па 180°. После этого эксцептрик 28 позволяет ролику 27 переместиться впиз вместе со щтифтом 26 и измерительной -кареткой 25. Кронштейн 37 соответственно заставляет острия 43 прийти в контакт с концами проверяемых резисторов. Через мирковыключатель 32 кулачок 31 дает сионал па измерение, которое выполняется расчетным контуром.
После этого двигатель 30 снова поворачивает вал 29 па 180°, в результате чего эксцептрик 28 снова возвращает каретку 25 в верхпее положение. Расчетный контур затем управляет шаговыми двигателями 11 и 12 (фиг. 4 и 5), которые через випты 15 и 17 и гайки 16 и 18 сдвигают ползупы 9 и 10 таким образом, чтобы привести подложку 8 со вторым резистором в соответствие с положением измерительного инструмента 39 (фиг. 5), в резу.гьтате чего начинается второе измерение.
По окончании замера последнего резистора масло подается в трубопровод 36, в результате чего гидроцилиндр 34 возврагцает каретку 25 в .нерабочее положение.
Оператор затем можег удалить основанне / вместе с проверенной подложкой 8, сняв ее со щгифтов iOO и 101.
Измерительный мост 48 измерительного блока (фпг. 3) соединен с тремя компараторами 103, 104 и 105, к которым подводится напряжение, вырабатываемое генератором опорного папрял-сения 106. Эти напряжения программируются вручную для всех резисторов посредством установочных приборов, размещеппых на панели управления 107. Установочные приборы позволяют фиксировать допуски для калчдого резистора. Эти допуски могут составлять 0,5; 1,2% и -быть в интервале or 5 до 5-25%. Для каждого выбранного допуска генератор опорного налряжвнпя 106 создает напряжение, соответствующее верхнему пределу требуемого допуска, и прикладывает его к компаратору 103. После этого можно получить сигнал о том, выще пли ниже заданного предела сопротивление измеряемого резистора.
Накопец, генератор онор.ного напряжения
106вырабатывает напряжение, соответствующее .нпжне.му пределу выбранного допуска, и прикладывает его к компаратору 104, который сигнализирует о том, ниже или выше зоны допуска сопротивления резистора. Кроме того, генератор 59 вырабатывает напряжение коррекции, одинаковое для всех резисторов, и указывает на нижние пределы, на которых резисторы могут быть исправлены. Это напряжение подается к компаратору 105, который сигнализирует, меньше или больше сопротивление резистора того сопротивления, при котором еще возможно исправление резистора.
Сигналы, создаваемые таким обарзом, посылаются в расчетный контур 108, в котором проводится подсчет на основе комбинирования трех вышеупомянутых сигналов для кал дого резистора; сигнала, указывающего, что резистор быть скорректпровап, или сигнала, указывающего, что резистор находится в пределах допуска, или, наконец, сигпала, указывающего на то, что резистор не может быть исправлен.
Сигналы, исходящие из контура 108, записываются на первом сердечнике накопителя 109 и контролируют цепь ПО, управляющую индикатором визуальной индикации 111, дающим результаты и ход измерений. В частности, ппдикатор 111, размещенный на панели
107(фиг. 2), содержит набор из трех ламп 112 (фиг. 3) различных цветов для кал-сдого пз резисторов Ri, .--схемы.
Калхдая из трех ламп загорается от одного из трех сигналов, выдаваемых цепью 108, в результате чего оператор время от вре.менп пл1еет возмол ность визуа.тьно состояние проверяемого резистора.
Индикатор 111, кроме того, содержит лампы 113, каладая из которых связана с каждым пз сопротивленп п способна залспгаться, когда по меньшей мере один из резисторов схемы должен быть забракован. Сигнал брака для одного резистора ехсмы устраняет в наконителс lOy любую .вероятную информац;по об исн.равленни других резисторов схемы и зажигает соответствующую лалшу 113.
Как 1наконнтель 109, так и индикатор 111 контролируются нрограммт1ьш кош-уром оЗ.
iio завершении цикла измерени резисторов контур 53 заставляет различные секторы наконителя воснринимачъ сигналы от расчетно схемы. Кро.че того, он заставляет срабатывать двенадцать рядов из трех ламп 112, нричем нрежде всего должна определиться возможность кор.рекции в каждом ряду зажиганием л а Mil ы Из.
Наконец, индикатор содержит ламну 114, которая зажигается только в том с.тучае, еели в конце измерения всей нодлолски с интегральными схемами ие иотребовалось исиравлять ни одного 1резистора, т. е. некоторые из них должны быть забракованы, а другие находятся в пределах допуска. В конце цроцесса измерения оператор цоэтому может визуально определить состояние всей ,под,1ож1.и 8. Он может отметить, например, карандашом, те кусочки, которые должны забраковываться, согласно показаниям ламц 113, чтобы затем устранить их вырезанием таких резисторов. Более того, если загорится ламна 114, он может исключить дальнейшее исправление всей тюдложки. Длительность измерения резистора составляет нримерно 200 мсек, ,в то время как для измерения всей подложки трсбуется 6 сек, принимая во внимание и установочные операции. Для того, чтобы отделить время измерения от времени на иснравлеппе, которое непостоянно, информация, содержан;аяся в накопителе 109 в конце измерения, передаетея под управлением программного контура 53 к коррекционному накопителю 115, подобному -накопителю 109. Иакоиитель 15, в свою очередь, приспособлеп управлять программным контуром 53 так, чтобы исключить такой перенос, и поэтому можно обновить измерительный цикл, «ак только :иаконитель 115 освободится от нрежней информации.
После измерения, если подложка имеет резисторы, -которые надо иснравить, оператор размещает основание 7 вместе со все еще нрикрепленной к нему подложкой нод де11ствием вакуумной трубки 99 на двух штифтах 64 и 65 блока 61.
Сначала он передвигает пластину 116 вперед действием на рукоятку 66, нреодолевая сопротивление нодпружиненного установочного элемента 67 (фиг. 9) так, чтобы перевести пластину 63 вперед относительно свободного конца рычага 93. Основание 7 затем размспхается на штифтах 64 и 65 посредством рукоятки 66, после чего пластина перемещается Б положение, пОказашюе па фиг. 9, вместе с основапием 7.
Шаговые двигатели 69 п 70 после этого нсремещают каретку 60 iisMecTC с пластиной 63 так, чтобы расположить первый резистор в соответствии с положением элекпроэрозионных игл 98. Две нары шаговых двигателей 76 и 77, в евою очередь заставляют сдвигаться две пары ползунов 74 и 75 так, чтобы разместить два из.мерительных зонда 81 в соответствнн с .расположением первого исправляемого резистора. Управляющая с.кс.ма иачплает колебать электроэрозиониую иглу 98 с частостой 200 циклов в секунду, пока измерительные зонды 81 не просигпалнзируют, что сонротнвление, нарастая, вошло в диапазон допуска.
Затем приводят в действие шаговые двигатели 69 и 70, чтобы переместить электроэрозионную иглу в соответствии со вторым резистором, в то время как шаговые двигатели 76 и 77 (фиг. 1) заставляют измерительные зонды 81 нереместиться к концам второго резистора RZ, в результате чего снова начинается цикл коррекции. Таким образол корректируются резисторы всей подложки.
На основе данных, зарегистрированных цакопитслем 115 (фиг. 3), узел коррекции корректирует резисторы RI, ..., которые паходятся тенерь в пределах допуска, и учитызает ту часть подложки, в которой забракован хотя бы один резистор.
Шаговые двигатели 69, 70, 76 и 77 (фиг. 11) управляются посредством малнитной или перфорированной леиты 116, па которой записаны координаты начала и конца каждого резистора RI, RZ- Данные с ленты считываются головкой 117, которая контролирует положение программирующего контура 118 через унра вляющую цепь 119. Программирующий коитур 118, кроме того, принимает информапию, имеющуюся в накопителе 115, так, чтобы задать перемегцения -кареткам только в том случае, когда резистор должеп -быть исправлен.
Более того, программирующий контур 118 под коптролем накоиителя 115 может добавлять время от времени к данным считываемым головкой 117, ностоянную величину, зависянгую от характеристики резисторов, к которым да1Н1ые относятся, поэтому нрограммируюн1, контур 118 управляет через цепь обратной связи 120 двумя щаговыми двигателями 69 и 70 (фиг. 11) для сдвигания подложКН 8 относительно элоктроэрозионной иглы 98 и через две другие цени обратной связи 121-нарами шаговых двигателей 76 и 77 для перемеи1епия двух измерительных зондов 81.
При считывании действия, которое требуется нроизвести, записанного на ленте 116 в начале каждой нн-формационпой группы, отиосянл,ейся к резистору, управляющая цепь 119, кроме того, контролирует цепь задания последовательности 122, приспособленную для присоедииения носледовательного ряда стандартных резисторов к электрическому мо9
сту 123 для измерения исправляемых резисторов в процессе исправления. Мост 123 соединен, в свою очередь, с коммутатором 124, к которому подключены проводники 82 зондов 81 (фиг. 10).
Когда мост 123 обнаруживает, что номинал измеряемого резистора равен стандартному, он подает через управляющую цепь 125 сигнал, вызывающий команду для начала считывания головкой 117 координат, относяищхся ,к следующему (резистору. Управляющая цепь 125, кроме того, контролируется накопителем 115 таким образом, что, если информация, относящаяся к тому же резистору, заключает, что этот резистор исправлять не надо, считывающая головка начинает в считывания считывать координаты следующего резистора, в результате чего все операции, которые относились бы к данному годному резистору, пропускаются. Информация в накопителе 115, означающая, что подлежащих исправлению резисторов нет, вызывает введение такой постоянной, которая приводит к пропускапию этого кусочка схемы, в рез льтате чего весь кусочек с интегральной схемой избегает коррекции.
После того как состояние программирующего контура 118 установлено и через цепи 120 и 121 каретки 57, 60, ползуны 74 и 75 достигли заданных положений, он контролирует с одной стороны -контур 126, управляющий подачей питания в электромагнит 127 для -приведения в действие измерительных 81. С другой стороны KOTiTyp 128 приводит в действие электроэрозионную иглу. В частности коптур, 128 заставляет цепь 129 питать катушку 130 так, что эта катунжа воздействует на якорь 97, и поэтому игла начипает попеременно вибрировать.
Программирующий ко«тур 118, наконец, приспособлен управлять цепью задания попоследовательности 131, которая питает переменно с частотой 200 циклов/сек мост 123 и цепь 132, связанную с иглой 98, которая работает при подключении к источнику высокого панряжения. Программирующий контур 118, таким образом, одновременно управляет
10
измерительными зондами 81. катущкой 130 и контуром задаНия последовательности 131, в результате чего выполняются замеры мостом 123 и -коррекция нглой 98 попеременно на установленном резисторе, -пока мост 123 не подаст сигнал, что этот резистор вошел «в зо«у допуска. После этого мост 123 разрешает головке 117 через управляюн1ую цепь 125 начать -новый цикл.
Тяким образом, коррекция резисторов непрерывно контролируется измерительными зондами 81 и мостом 123, и коррекция ограничивается исключительно теми резисторами, которые ВЫХОДЯТ из зоны дону-ска, в то время как все операцни исключаются для того кусочка схемы, на котором забракован хотя бы один резистор.
Предмет и зобретения
Устройство для контроля и коррекнии тонкопленочиых резисторов гибридных интегральных схем, содержащее механизм перемещения подложки, механизм электроэрозионного удаления пленки резистора, узел коррекцип, измерительный блок с пзмеонтельными зондами и мостом и -приводной механизм, о тл и чаю щ и и с я тем, что, с целью повышения Производительности, измерительный блок выполнен в виде опоры с закрепленными на ней ползунами с возможностью перемещения их во взаимно перпендикулярных направлениях от щаговых двигателей, связанных с приводным геханизмом. причем на ползунах закреплепы рычаги с расположенными на них измерительными зондами, соединенными через измерительный мост с компараторами, сое.диненными с генератором опорного напряженяи, выход которого соединен с блоком памяти, связанным через коррекционный накопитель с ирограммир юн1;им ко-нтуром, а узел коррекции также снабжен измерительными зондами, соединенными через Коммутатор с измерительным мостом и птаговыми двигателями, служанипш для перемещення измерительных зондов н электрически связанными с уномянутым программирующим контуром.
7


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подгонки прецизионных пленочных резисторов | 1981 |
|
SU960971A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧЕРЕПА | 2011 |
|
RU2456915C1 |
| Прибор для измерения кривизны буровых скважин | 1975 |
|
SU699164A1 |
| Автоматическая контрольно-сортировочная линия производства проката | 1975 |
|
SU547240A1 |
| Устройство для автоматической раз-гРузКи гидРОКлАССифиКАциОННыХ АппА-PATOB | 1979 |
|
SU812346A1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С НАНОТОМОМ | 2010 |
|
RU2427846C1 |
| Машина для исследования сложного напряженного состояния трубчатых образцов материалов | 1958 |
|
SU121586A1 |
| Устройство для вырубки изделий из резины | 1977 |
|
SU994286A2 |
| Устройство для контроля и регулирования производительности | 1990 |
|
SU1791032A1 |


vz
Фие2
Ш Ш /йй
38 --..
Пч- йзH -ft-- ..
Г 1Г
// / , / - ./, . ,Ч1 I
S1
J2
9UA Ц.
3
ASirrfl
/-f i-Vr iiK / ,Я iW,.3
гг
I Г---:-;:-: :7rr h
j;:.
...I-, J 11
.,.JK
J: г1-.
: :: i- ; U;;iJlllL lП-. ; .-;; ,I
-t.i i };;-h i-J
1 7Л - ,:....:,. I
/ - - ifL-/-у bq 0 / c±::4f:::-&
t
« v/
v/
..ПЕШШ
, /г
Т
Ч
Фуг 5
1912
26 27
24 34 35 5 25 2Ц
..J,
-33
Pio -32
.. J Г
9j .: I
f-. 3 U.
1,4
щ 1|У| ц:а11 ..-x
4 J ..;:.-.i-: -- - / i 7/i
fT r т:-5-p r,,,/V,
-n,s . s i-nL --;V-ll-. .. T,... 1
.r-i±::iTr- --n
« czzz::ji.,
.--j,Qи
on i -T:: j 11
I тгГП Т,
82
9) 90
