Регулирование определенной величины, напр., числа оборотов, давления, силы тока, производится в большинстве случаев таким образом, что зависящая от этой величины сила (напр., центробежная сила, сила давления, сила элекромагнитного притяжения) действует на подвижную часть подходящего приспособления, а этой силе противодействует сопротивление (напр., сила пружины), которое изменяется соответственно положению подвижной части. Каждому перестановочному усилию, зависящему от регулируемой величины, соответствует в таком случае определенное положение подвижной части, при котором перестановочное усилие и противодействующая сила находятся в равновесии. Перемещения подвижной части могут быть использованы при этом каким-либо образом для воздействия на регулируемую величину. Часто приходится, однако, рещать несколько иную задачу, а именно, допускать воздействие регулируемой величины на регуляторную систему лишь в том случае, когда эта величина перешагнула верхний или нижний предел определенного интервала. Например, если требуется регулировать давление какой-либо системы, может быть поставлено условие, чтобы это давление не могло превысить 5 раб. атм. или опуститься ниже 1 раб. атм. Эта задача до сего времени разрешалась двояким образом. В одном случае применяли два регулятора, из коих один приходил в действие при переходе регулируемой величины выше некоторого максимального значения, а другой при опускании этой величины ниже некоторого минимального значения. Недостаток такого решения задачи состоит в том, что приходится применять два комплектных регулятора, что приводит к усложнению устройства и в особенности в случае применения жестких передаточных штанг представляет трудности в отношении установки. Другое решение задачи состоит в применении лишь одного регулятора, обладающего мертвым ходом, так что он бездействует, когда регулируемая величина изменяется в нормальном, т. - е. соответствуюш,ем мертвому ходу, интервале и начинает проявлять свое действие лишь в том случае, когда означенная величина выходит за верхний или нижний предел этого интервала. Недостаток такого решения задачи состоит в том, что подвижные части регулятора должны проходить длинные пути, так что для самого процесса регулирования, начинаюш,егося лишь при выходе регулируемой величины за пределы интервала, в распоряжении остаются лишь незначительные части хода регулятора, что понижает чувствительность таких регуляторов. Между тем, именно при таких предельных регуляторах важное значение имеет точное соблюдение соответствующих предельных значений. В особенности в случае применения мембранных регуляторов, допускающих лишь небольшой регуляторный ход, такое устройство вызывает существенные затруднения.
Предлагаемое изобретение имеет целью дать предельный регулятор, который без помощи второго регулятора приходил бы в действие лишь вне определенных предельных значений, при чем это должно происходить при сохранении небольших величин хода его подвижных частей. Для этого зависящее от регулируемой величины перестановочное усилие и зависящая от положения подвижного органа регулятора противодействующая сила взаимно уравновешиваются лишь в одной части хода регулятора, тогда как в другой части
этого хода к той или другой силе присоединяется находящаяся наготове определенная по величине сила другого органа, так что регулятор начинает работать лишь при превышении или падении ниже двух предельных значений регулируемой величины в той или другой части хода.
Конструктивное воплощение этой мысли поясняется несколькими примерами, изображенными на фиг. 1 - 5 чертежа. Предполагается, что дело идет о соблюдении условий указанного выше случая, когда давление газа не должно превышать 5 раб. атм. и не должно опускаться ниже 1 раб. атм. Пусть воздействие давления газа на регуляторный орган происходит, в соответствии с фиг. 1, таким образом, что нижняя сторона поршня а регулятора приведена в сообщение с газопроводом. Противодействующее усилие доставляется пружиной Ь, которая отрегулирована таким образом, что при изображенном на чертеже положении поршня она уравновешивает давление газа в 5 раб. атм. Следовательно, как только давление газа превышает это значение, поршень начинает перемещаться кверху. Это движение при помощи регуляторной штанги с может передаваться подходящим органам, которые при этом понижают давление газа в такой степени, что поддерживается предельное давление в 5 раб. атм. Добавочная сила для нижней части, хода доставляется пружиной d, которая обладает определенным предварительным напряжением, под влиянием которого диск е прижимается к неподвижному упору /. В изображенном на чертеже положении движение поршня а вниз ограничивается диском е, так как шток поршня предусмотренным для сего заплечиком g как-раз покоится на диске. Пружина d отрегулирована таким образом, что она при изображенном на чертеже наивысшем положении пружины b удерживает равновесие при давлении
газа в 1 раб. атм. Как только, еле- i довательно, давление газа опускается ниже 1 раб. атм., пружина b преодолевает сопротивление пружины d, так что поршень ; начинает двигаться вниз, действуя в соответствующем направлении на орган, регулирующий давление газа. Таким образом, регуляторная тяга с находится в покое при изменении давления в пределах от 5 до 1 раб. атм. и начинает перемещаться лишь тогда, когда это давление приобретает значе-. ние выше или ниже этого интервала.
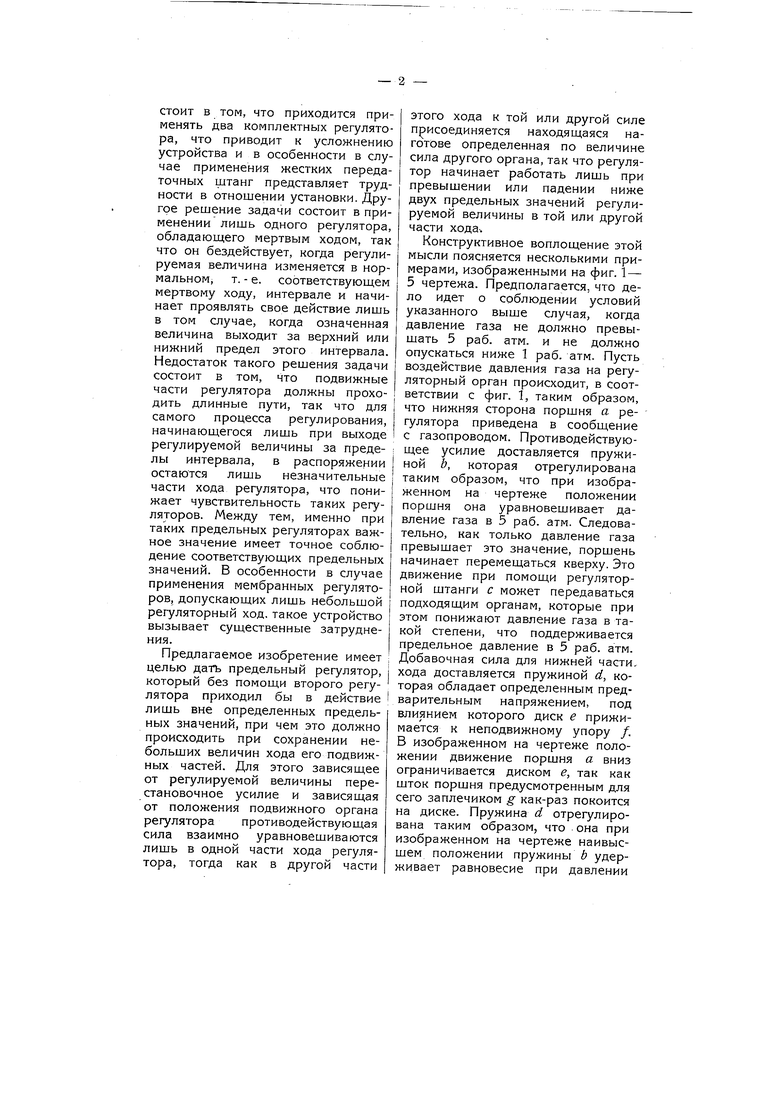
Та же мысль, лежащая в основании изобретения, может быть применена ко всем процессам регулирования с применением в качестве противодействующей силы, пружины или в соответствующих случаях, также к процессам, у которых эта противодействующая си- i ла создается действием грузов. На фиг. 2 изображен регулятор ско- i рости, у которого расхождение ма- j ховых грузов а относительно изо- ; браженного на чертеже положения ; происходит лишь в том случае, | когда превышен определенный I верхний предел числа оборотов, тогда как сближение грузов имеет ; место лишь тогда, когда достигнут | определенный нижний предел I числа оборотов, так что сила растянутой пружины при появле- НИИ соответственно уменьшившейся i центробежной силы преодолевает j сопротивление пружины d.:
На фиг. 3 поясняется случай ре- ; гулирования силы тока (посред- j ством какого-нибудь органа также : регулирование напряжения, мощности или магнитного поля). Цепь катушки возбуждает направленное вверх поле, сила которого меняется соответственно величине силы тока и при этом подвергает соответственно колеблющимся усилиям сердечник а. Когда направленная вверх магнитная сила превышает известный предел, сопротивление контр-пружины b преодолевается. Когда же эта магнитная сила опускается ниже другого известного предела, пружина b получает возможность переместить вниз сердечник а, преодолевая добавочную силу пружины d.
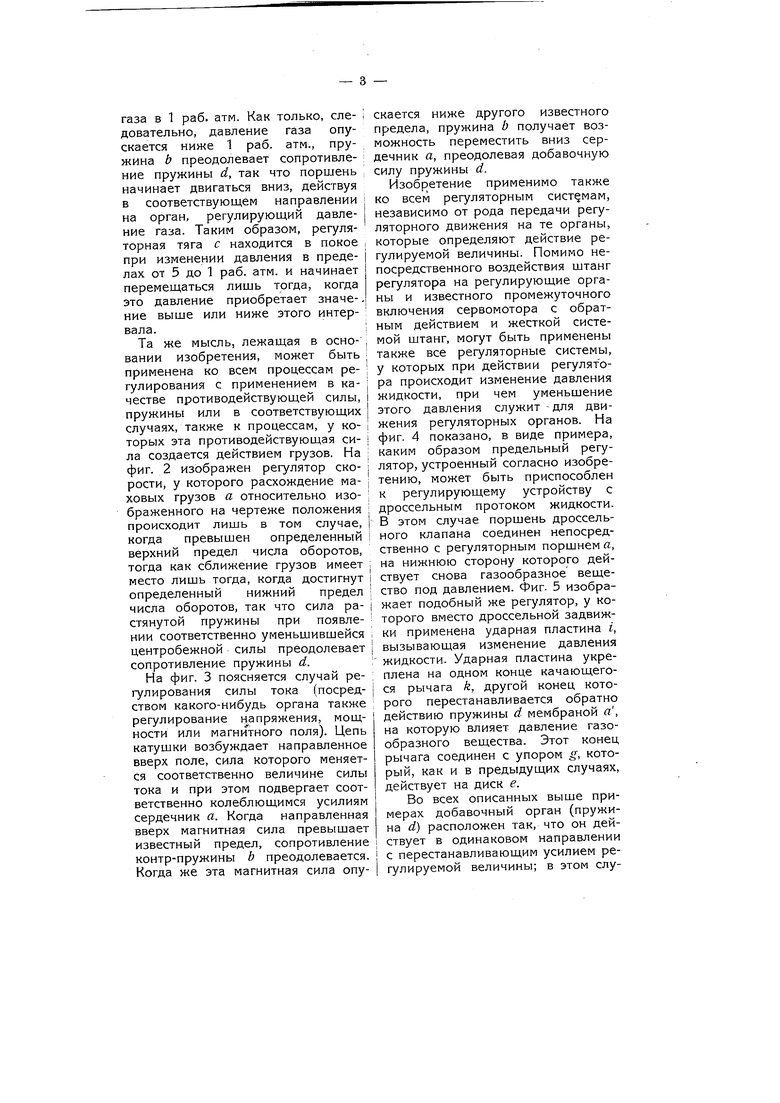
Изобретение применимо также ко всем регуляторным системам, независимо от рода передачи регуляторного движения на те органы, которые определяют действие регулируемой величины. Помимо непосредственного воздействия штанг регулятора на регулирующие органы и известного промежуточного включения сервомотора с обратным действием и жесткой системой штанг, могут быть применены также все регуляторные системы, у которых при действии регулятора происходит изменение давления жидкости, при чем уменьшение этого давления служит -для движения регуляторных органов. На фиг. 4 показано, в виде примера, каким образом предельный регулятор, устроенный согласно изобретению, может быть приспособлен к регулирующему устройству с дроссельным протоком жидкости. В этом случае поршень дроссельного клапана соединен непосредственно с регуляторным поршнем а, на нижнюю сторону которого действует снова газообразное вещество под давлением. Фиг. 5 изображает подобный же регулятор, у которого вместо дроссельной задвижки применена ударная пластина i, вызывающая изменение давления жидкости. Ударная пластина укреплена на одном конце качающегося рычага k, другой конец которого перестанавливается обратно действию пружины d мембраной а , на которую влияет давление газообразного вещества. Этот конец рычага соединен с упором g, который, как и в предыдущих случаях, действует на диск е.
Во всех описанных выше примерах добавочный орган (пружина d) расположен так, что он действует в одинаковом направлении с перестанавливающим усилием регулируемой величины; в этом случае означенный орган приходит в действие в нижней части хода регулятора. Устройство может быть выполнено, однако, и для обрат- i ных условий, т.-е. так, чтобы добовочная сила действовала в верхней .части хода, усиливая противодействующую силу.I
Предмет патента.{
Предельный регулятор, характе- ; ризующийся применением двух пружин, из коих первая регулируемая пружина d, расположенная
между неподвижным упором / и подвижной частью регулятора, воздействует на последнюю при понижении величины регулируемого усилия далее определенного предела, а вторая пружина b служит для перестановки той же подвижной части регулятора при повышении регулируемого усилия далее определенного предела, при чем усилия означенных пружин вместе с регулируемым усилием, при изменении величины последнего в пределах определенного интервала, находятся в равновесном состоянии.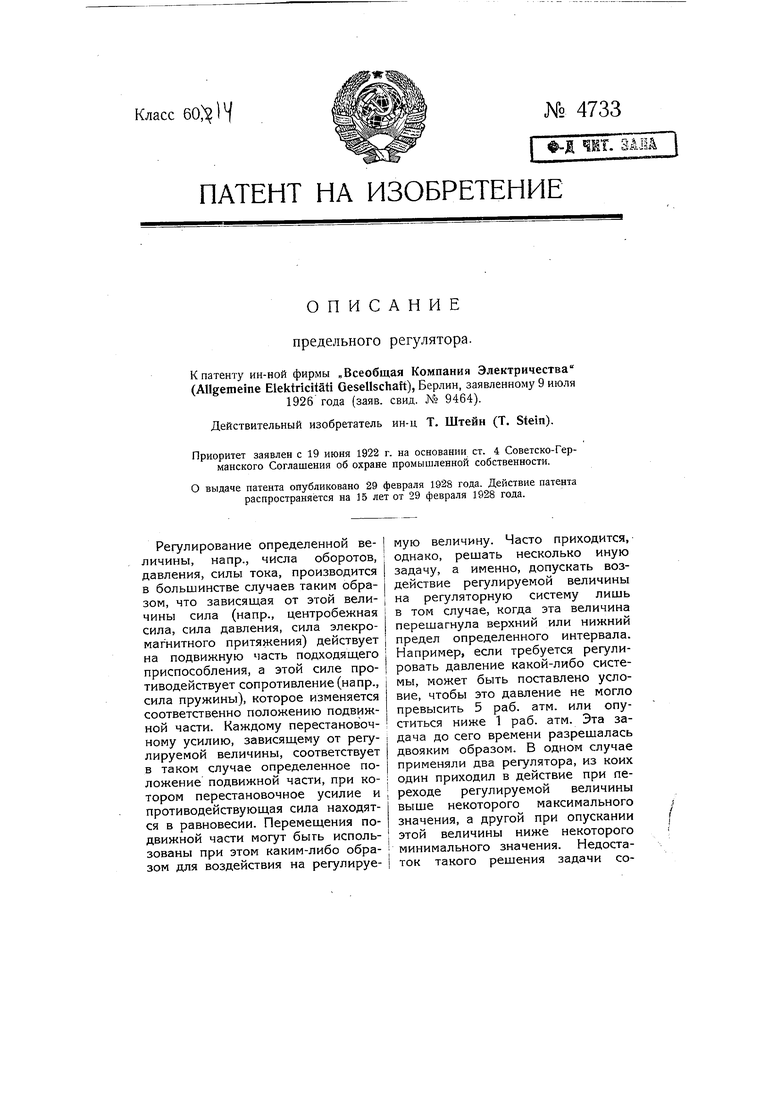
Фип1.

