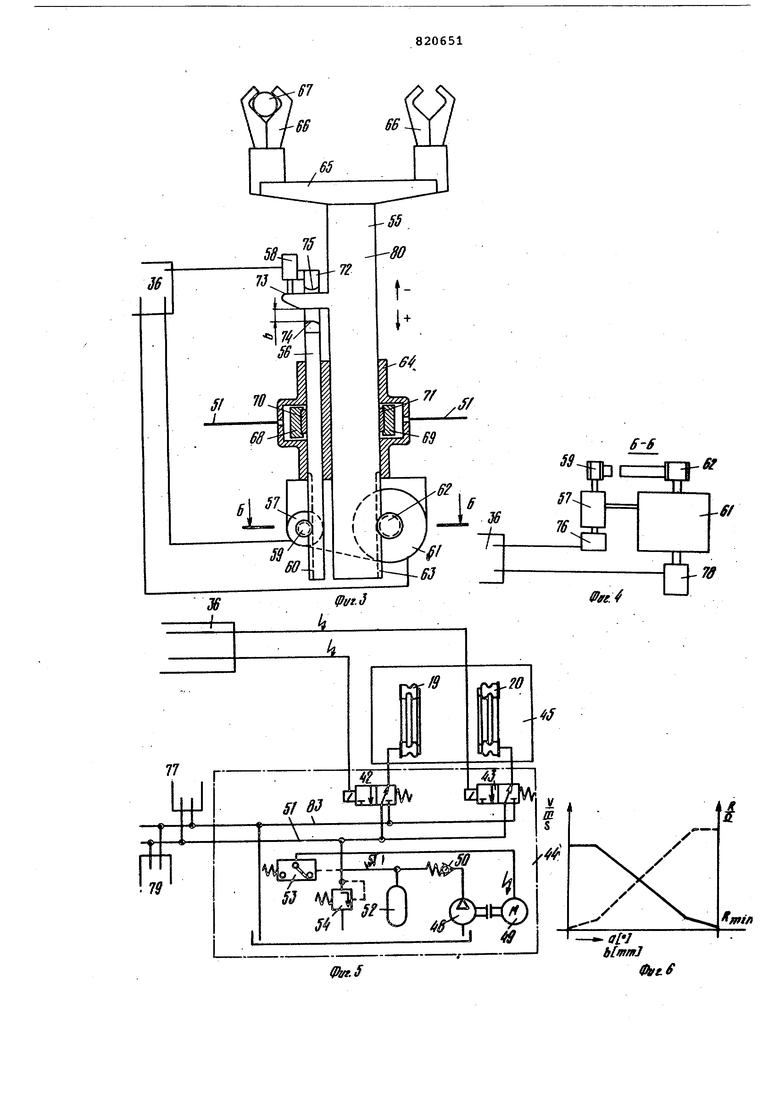
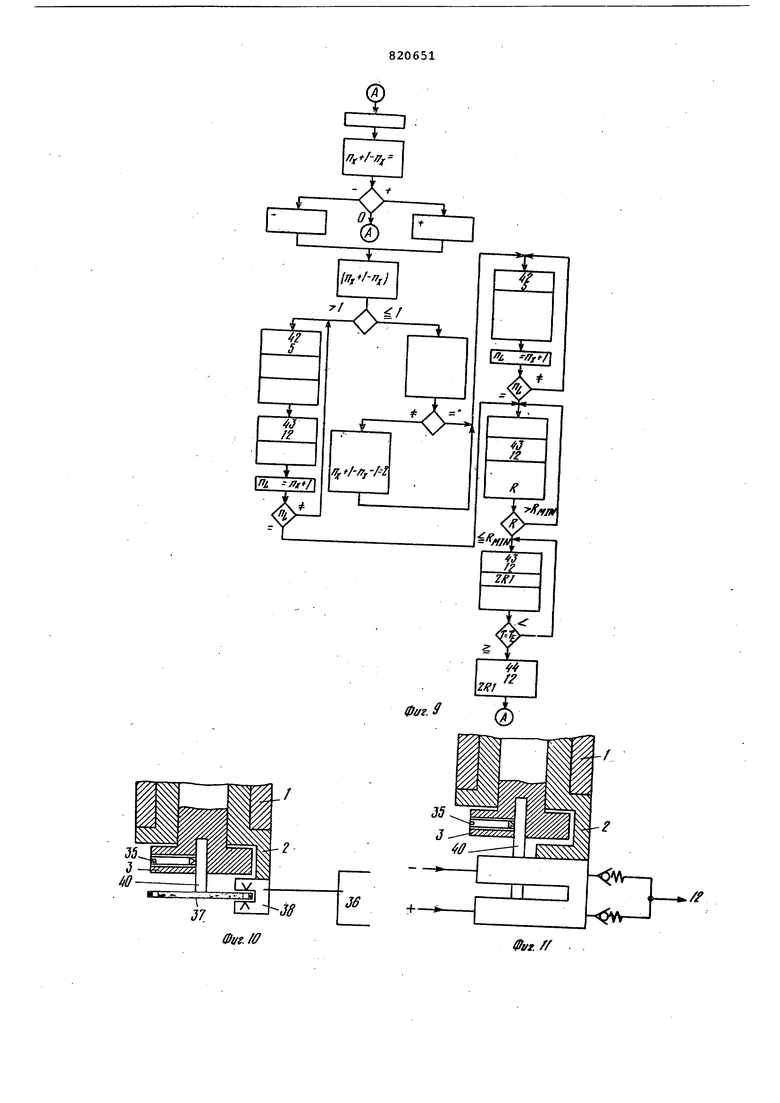
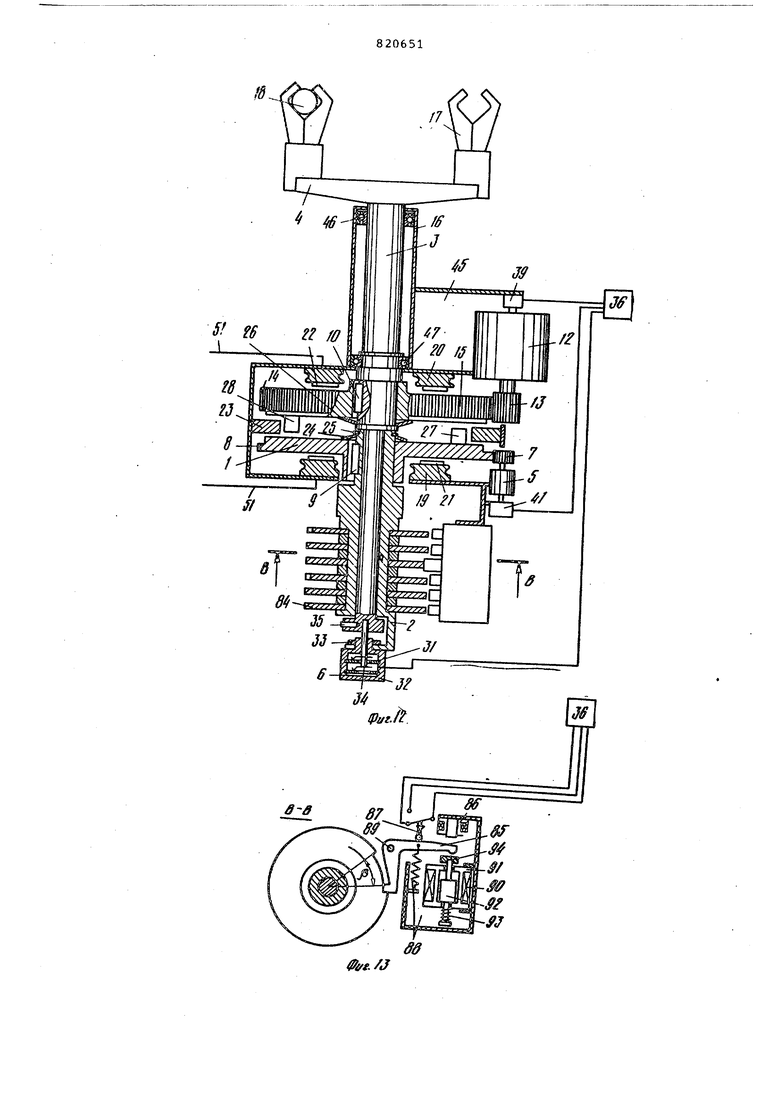
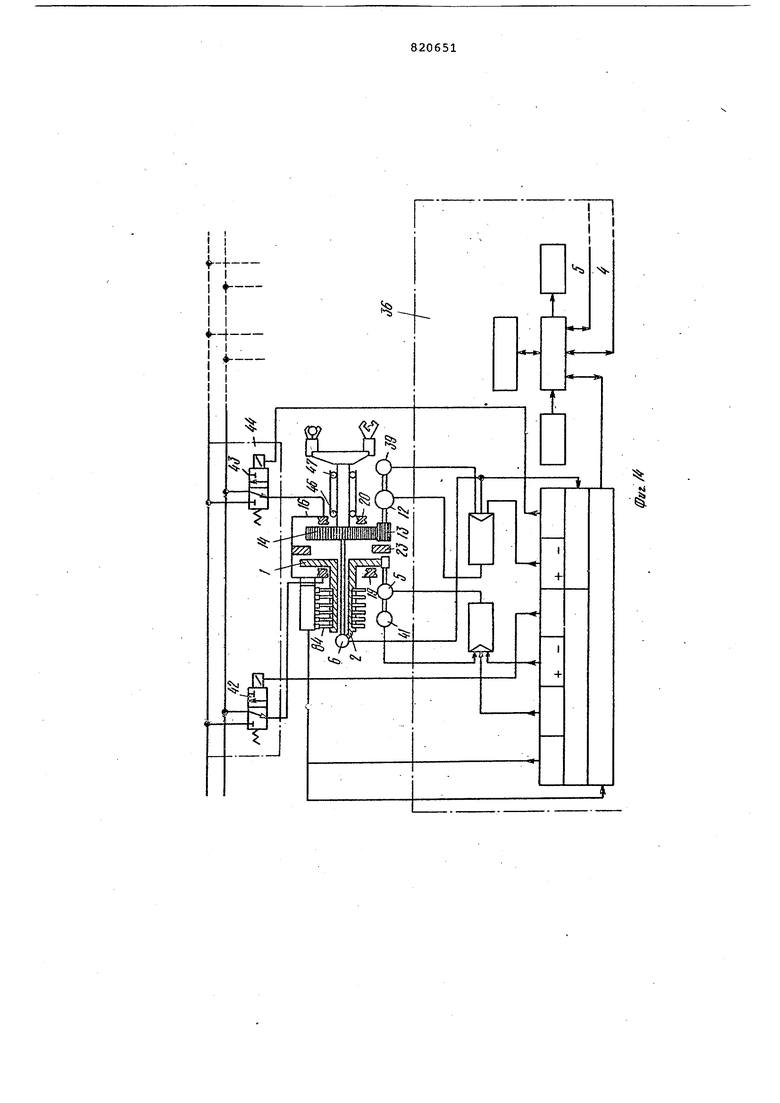
(54) УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ РАБОЧЕГО ОРГАНА ства для преобразования угла поворота в код; на фиг. 11 - другой вариан устройства управления скоростью в виде регулирующего расход клапана; на фиг. 12 - механизм поворота по фиг. 1 с приспособлением для .механичёской установки вспомогательного привода; на фиг. 13 - разрез В-В на фиг. 12; на фиг. 14 - блок-схема раб ты механизма перемещения с механи- чески установленным в требуемом положении вспомогательным приводом; на фиг. 15 - схема программы процесса п ремещения в заданное положение с помощью механизма перемещения по фиг.1 Вспомогательный регулирующий привод механизма поворота включает упорный диск 1,который посредством втулки 2 закреплен соосно на валу 3 исполнительного органа 4 с возможностью аксиального перемещения и вращения, серводвигатель 5 и устройство 6 управления скоростью. , Зубчатое колесо 7 на приводном валу серводвигателя 5 находится в зацеплении без зазора с зубьями 8 упорного диска 1, который, в свою очередь, передает свое вращательное движение через призматическую шпонку 9 на уст ройство 6 управления, соединенное со втулкой 2. Следящий регулирующий при вод включает исполнительный орган 4, вал 3, закрепленный на последнем пос редством призматической шпонки 10 с воЭможностью аксиального перемещения, перестановочный диск 11 и следящий двигатель 12. Зубчатое колесо 13 на приводном валу следящего двига теля 12 находится в зацеплении с зуб ями 14 перестановочного диска 15. Вал 3 с помощью подшипников качения установлен поворотно в корпусе 16 и несет в качестве рабочего инстр мента спаренные захваты 17 с изделием 18. Гидравлически приводимые тормозные цилиндры 19 и 20 состоят из внутроннего и наружного металлических сильфонов и соединены с корпусом 16 герметично без возможности вращения. Внутренний и наружный металлические сильфоны соединены между со бой также герметично свотми торцами, на которые наложены фрикционные накладки 21 и 22 соответственно. При отсутствии давления между Фрикционной накладкой 21 и упорным диском 1, а также между фрикционной накладкой 22 и перестановочным диском 15 имеется зазор. Тормозное кольцо 23,к ко торому упорный диск 1 может быть при жат тормозными цилиндрами 19, а перестановочный диск 15 - тормозными цилиндрами 20 при торможении, расположено соосно по отношению к валу 3 и жестко соединено с корпусом 16. Во врат упорного диска 1 в исходное положение после торможения обеспечивает тарельчатая пружина 24, расположенная под начальной нагрузкой между закрепленн.ым на втулке 2 стопорным кольцом 25 и упорным диском 1. Возврат перестановочного диска 15 обеспечивается аналогичным образом второй тарельчатой пружиной 26, расположенной под начальной нагрузкой между заплечиком вала 3 и перестановочным диском 15. Упорный диск 1 выходит СБОИМ упором 27 на траекторию другого жестко закрепленного на перестановочном диске 15 упора 28, от которого упор 27расположен на некотором расстоянии. При вращении исполнительного органа 4 по часовой стрелке (положительное направление вращения) упор 28 соприкасается с контактной поверхностью 29 упора 27, а при вращении в противоположном направлении (отри- . цательное направление вращения) упор 28соприкасается с другой контактной поверхностью 30 упора 27. Устройство 6 управления скоростью, с одной стороны, своим корпусом, содержащим два резистора 31 и 32, посредством винтовой гайки 33 через -втулку 2 соединено с упорным диском 1 а, с другой стороны-, валом 34 ползунка посредством установочного винта 35 связано с валом 3 перестановочного диска 15. Скоростью вращения следящего двигателя управляют включенные в блок 36 управления регуляторы в зависимости от разности положений вспомогательного и следящего приводов, т.е. от угла )6 , определяемого положением упора 28 относительно контактной поверхности 29 упора 27 (см. фиг. 2) , пропорционально величине активного сопротивления для одного или другого направления вращения резистора 31 или 32 соответственно. Характеристика сопротивления или скорости согласно диаграмме {фиг. 6jобеспечивает приближение упора 28 в зависимости от направления вращения к контактной поверхности 30 или 29 со снижающейся скоростью. Характеристика сопротивления по указанному углу может быть рассчитана отдельно для каждого направления движения путем принятия соответствукидей функции и изменения характеристики резисторов 31 и 32 известным образом, например путем соответствующей проводки ответвлений. Благодаря этому характеристика резисторов может быть изменена в соответствии с конкретными условиями, например под влиянием силы тяжести при подъеме и опускании. Устройство 6 управления скоростью может быть выполнено не только в ви- де резистора в электрической схеме регулирования с усилкем или без него, но также, как это показано на фиг.10, в виде цифрового датчика импульсов с соответствующим подключенным устройством настройки следящего двигателя 12. При этом расположенная соосно по отнесению к валу 3 часть датчика импульса выполнена в виде кодирующего диска 37 устройства для преобразования угла поворота в ксзд и соединена с валом 3. Пробник 38 датчика импульсов прикреплен к втулке 2 упорного диска 1. Определяекше значения изменения указанного угла и направления вращения направляются в блок 36 на управление следящим двигателем 12, причем датчик импульсов подает заданной скорости, а тахогенератор 39 - действительной скорости.в регулятор скорости (фиг.8
Если следящим двигателем 12 предполагается управлять гидрсшлически или пневматически, устройство ущ авления скоростью выполнено соответственно в виде пневматических или гидравлических дроссельньис или регулирующих расход клапанов, причем для каждого направления движения предусматривгиот по одному клапану. Обратны клапаны в трубопроводе, ведущем к следящему двигателю 12, предотвращают взаимное воздействие. Согласно фиг. 11 управляющий вал 40, соединенный с валом 3 посредством убтановочного винта 35,управляет проходным сечением, т.е. расходом регулирующих клапанов в зависимости от угла об . Площади сечения мест дросселирования, аналогично сопротивлениям потенциометра, рассчитаны соответственно характеристике скорости в зависимости от угла по заданной функции (см. фиг. б).
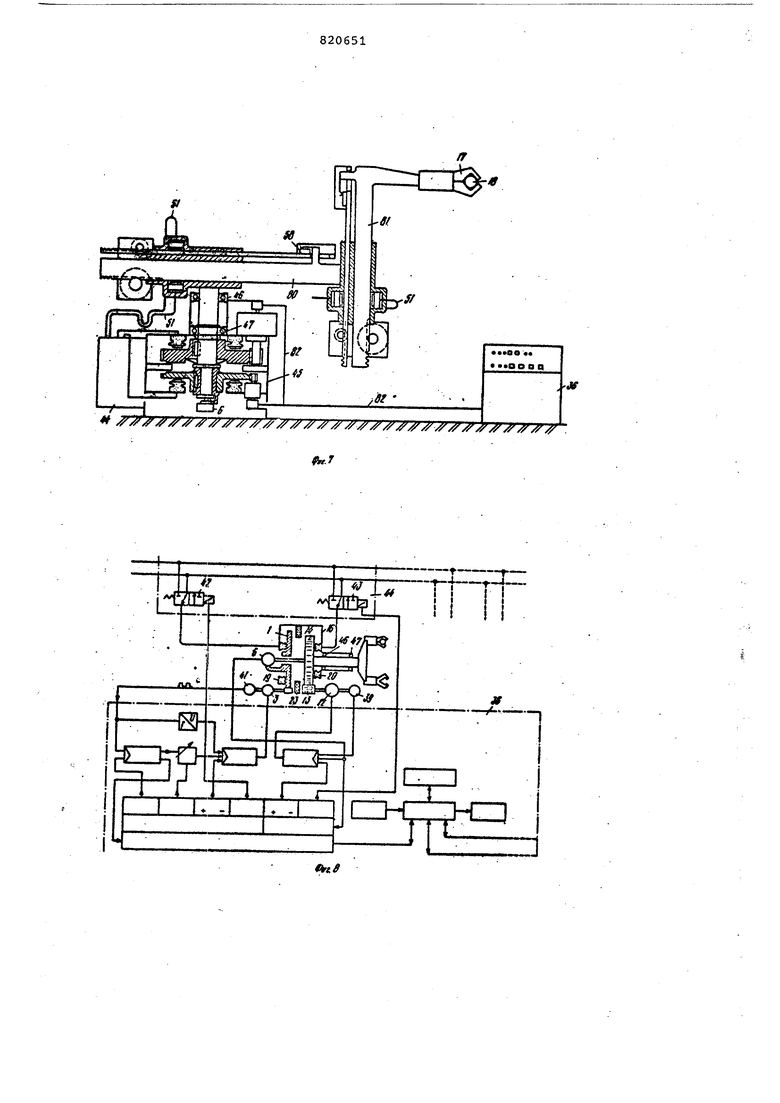
На фиг. 8 показана блок-схема блока 36 управления предлаГаекым устройством, причем процессы упргшления иллюстрируются на примере механизма поворота. Элемент управления данным механизмом поворота соединен с параллельно соединенными схемами управления устройствами других механизмов перемещения по общей прогрёшме управления всем устройством. Общая программа управления воздействует обратными CHrHcUicUQi на схемл управления отдельных параллельно соединенных механизмов перемещения и, кроме того, соединяет предлагаемо устройство через наружные входы и выходы С другими производственными установками, например с другими машингиш-орудиями, в автоматической линии. Элемент управления механизмом перемещения воздействует на контуры .регулирования положения и скорости для серводвигателя 5 и контур регулирования скорости для следящего двигателя 12. Заданное положение, направление и величина скорости, а . также пуск и остановка вспомогательного привода задаются программой в блоке 36 управления. Обработка данных осуществляется по блок-схеме программы (фиг. 9). Воздействие на вспомогательный привод осуществляется через датчик 41 для серводвигателя 5 и через клапан 42 управления для тормоза 19.
Для следящего привода блоком 36 управления подаются лишь команды е Пуск ИЛИ Стоп, а скорость привода управляется непосредственно устройством 6 управления скоростью, обеспечив.гиощим также командную связь между вспомогательным и следящим
Q приводами. Воздействие на следящий привод осуществляется через тахогенератор 39 в качестве датчика для следящего двигателя 12 и через клапан 43 управления для тормоза 20. Из фиг. 8 следует, что для вспо5 могатального привода небольшой мощности требуется большее число операций регулирования, чем {цля следящего привода большой мощности.
0 На фиг. 2 исполнительный орган 4 механизма перемещения находится на пути от одного промежуточного поло жения к следующему. Электрический серводвигатель 5 включен через устройство настройки с програквшруемой скоростной и временной характеристикой в блоке 36 управления. Напргшление вращения серводвигателя 5 определяется устройством настройки из
Q положения и последовательности промежуточных позиций. Определение действительных значений для регулирования скорости и положения серводвигателя 5 или упорного диска 1 рсус ществляется в рассматриваемом примере посредством датчика 41 приращения проходимого пути в виде известного датчика приращения или датчика импульсов. По числу импульсов, подавае1«1х последним,устройство настройки определяет положение, а по частоте импульсов - скорость, и серводвигатель 5 регулируется по запрограммированной скоростно-временнрй характеристике. По мере приближения
5 к заданному положению скорость вращения серводвигателя 5 снижается до остановки его в момент достижения заданного положения. При достижении указанного заданного положения или
0 в случае нарушений работы клапан 42 управления обесточивается и возвращается пружиной в исходное положение, вследствие чего в тормозной цилиндр 19 подается среда, находящаяся под повышенным давлением. Повышенное давление вызывает расширение тормозного цилиндра 19 в аксиальном направлении. Лри зтом фрикционная накладка 21 давит на упорный диск 1, прижимая его к тормозному кольцу 23.
0 Выбирают такое повышенное давление, при котором возникающий при прижатии тормозной момент во много раз превышает наибольший крутящий момент, создаваемой двигателем 12 на исполни-.
S тельном органе 4.
Повышенное давление создается в гидравлической системе, которая собрана в блок 44 и закреплена на основ анииСмеханизма 45 поворота, содержащем подшипники 46, 47, как это показано на фиг. 7.
Как видно из показанной на фиг. 5 схемы гидравлического блока 44,пос- . ледний содержит 48, приводимый в действие от электродвигателя 49. Насос 48 подает масло из отстойника через обратный клапан 50 в напорный трубопровод 51. Электромагнитные клапаны 42 и 43 в обесточенном состоя-нии в котором они показаны на фиг. 5, позволяют подавать масло к тормозным цилиндрам 19 и 20 соответственно.
Так как при указан-ном состоянии схемы подаваемое масло не может стечь гидроаккумулятор 52 наполняется до тех пор, пока не сработает реле 53 давления и включит двигатель 49. В случае отказа реле 53 давление в трубопроводе 51 ограничивается регулирунхдим клапаном 54. Когда к клапанам 42 и 43 управления подводится ток, тормозные цилиндры 19 и 20 соединяются с отводящим трубопроводом, вследствие чето прекращается тормозящее действие. Если повышенное давление .понижается после нескольких процессов торможения до определенной минимальной величины, то двигатель 49 и тем самым и насос 48 снова включается через реле 53 давления.
Описанный процесс осуществляется независимо от блока 36 управления. При этом емкость гидроаккумулятора 52 рассчитана так, чтобы при выключении устройства или при перерыве в подаче тока тормозные цилиндры всех механизмов перемещения предлагаемого устройства были наполнены маслом под достаточным давлением и, кроме того, чтобы имелся запас сливного масла.
Электрический следящий двигатель 12 включается также вышеуказанным блоком 36 управления.
Путем сравнения числовых значений занимаемого положения пх и следующего достигаемого положения блок управления определяет необходимое направление вращения и требуемое различное управление клапанами 42 я. 43 управления. Этот процесс показан в блок-схеме программы на фиг. 9.
Если расстояние меходу последовательно занимаемыми промежуточными положениями меньше или равно углу
об , то только после того, как упорный диск 1 достигнет нового положения, путем включения клапана 43 управления снимается давление с тормозного цилиндра 20 f следящий двигатель 12 включается и приводится во вращение в соответствующем направлении. После пуска под нагрузкой скоростью вращения начинает управлять устройство 6 управления скоростью в зависимости от положения упора 28 относительно контактной поверхности 30 или 29 Упор 28 подводится с очень низкой скоростью к поверхности 29 или 3 в зависимости от направления вращения , где его удерживает следящий двигатель 12, обеспечивая жесткую кинематическую связь. Во избежание неточной установки вследствие возможного резкого обратного движения клапан 43 управления обесточивается только по истечении короткого времени включением в блок управления реле времени и возвращается пружиной в исходное положение. Вследствие этого тормозной цилиндр 20 сообщается с напорным трубопроводом 51 и наполняется средой, находящейся под повышенным давлением. Повышенное , давление обеспечивает расширение тормозного цилиндра 20 в аксиальном направлении. При этом фрикционная-накладка 22 давит на перестановочный диск 11, прижимая его к тормозному кольцу 23.
Этим перемещение в заданное положение заканчивается и следящий двигатель 12 выключается.
Если расстояние между последовательно занимаемыми промежуточными положениями больше угла об , то путем одновременного включения клапанов 42 и 43 управления снимается давление с тормозных цилиндров 19 и 20, а серводвигатель 5 и следящий двигатель 12 включаются одновременно TciK, что они вращаются в одном и том же направлении.
После пуска серводвигатель 5 вращается с запрограммированной скоростью. Следящий двигатель 12 после пуска синхронизируется устройством 6 управления скоростью по скорости с серводвигателем 5.
По мере приближения к заданному положению скорость серводвигателя 5 снижается до остановки его в момент достижения заданного положения и упорный диск 1 фиксируется так, как уже описывалось выше. Управление скоростью вращения следящего двигателя 12 устройством б управления скростью осуществляется по времени таким образом (фиг. 6), что упорный диск 1 будет уже зафиксирован перед тем, как упор 28 перестановочного диска 11В зависимости от направления вращения соприкоснется с контактной поверхностью 29 или 30. Фиксацией исполнительного органа 4 тopмoзны и цилиндрами 20 заканчивается процесс перемещения в заданное положение .
Вспомогательный привод механизма смещения состоит из расположенного параллельно перестановочному стержню 55 упорного стержня 56, серводвигателя 57 и устройства 58 управления скоростью. Зубчатое колесо 59 на приводном валу серводвигателя 57 нахо- дится в зацеплении без зазора с зубьями 60 на упорном стержне 56. Следящий привод состоит из перестановочного стержня 55 и следящего двигателя б1. Зубчатое колесо 62 на приводном валу следящего двигателя 61 находится в зацеплении с зубьями 63 на перестановочном стержне 55.
Упорный стержень 56 и перестановочный стержень 55 установлены в корпусе 64 ссвозможностью перемещения. В рассматриваемом примере перестановочный стержень 55 несет в качестве- исполнительного органа 65 рабочий инструмент, выполненный в виде спаренных захватов 66 с изделием 67.
В отверстиях корпуса 64 размещены уплотненные поршни 68 и 69 тормозных цилиндров, которые при торможении воздействуют в вертикальном направлении на упорный стержень 56 и перестановочный стержень 55 соответственно таким образом, что последние прижимаются к их направляющим в корпусе 64. На торцы поршней 68 и 69 наложены фрикционные накладки 70 и 71. При отсутствии повышенного давления между фрикционной накладкой 71 и перстановочным стержнем 55 имеется зазор, создаваемый пружиной сжатия (не показана). Упорный стержень 56 своими упорами 72 охватывает упор 73 перестановочного стержня 55. При перемещении перестановочного стержня 55 вниз (положительное направление движения) упор 73 соприкасается с контактной поверхностью- 74, а при перемещении в противоположном направлении (отрицательное направление движения) упор 73 - с контактной поверхностью 75. Устройство 58 уп-. равления скоростью соединено с одной стороны с упором 73 перестановочного стержня 55, ас другой стороны - с упорным стержнем 56 и, в зависимост от направления движения перестановочного стержня 55, управляет скоростью вращения следящего дви ателя 61 в соответствии с величиной расстояния b посредством датчика-тахогенератора 33 согласно диаграмме (фиг. 6).Ра стояние Ь определяется положением упора 73 относительно контактной поверхности 74.
Характеристику скорости можно рассчитать любым образом для каждого направления движения (положительного или отрицательного) в соответствии с конкретными требованиями, например путем выбора соответствуюдей функции как это показывает диаграмма на фиг. ипутем соответствующего выполнения движка потенциометра.
В зависимости от вида энергии (электрическая, пневматическая или гидравлическая)применяемой для привода следящего двигателя 61, а также в зависимости от характера управления (анал9 говое или цифровое) устройство 58 управления скоростью можно выполнить с последующим усилением или без него как электрический потенциометр в виде цифрового датчика импульсов с подключенным к нему устройством настройки либо как пневматический или гидравлический регулирующий расход клапан.
Согласно фиг. 3 перестановочный стержень 55 механизма перемещения на0ходится на пути из одного промежуточного положения в следующее. Электрический серводвигатель 57 включен устройством управления блока 36 уп-. равления через датчик 76 по запрог5раммированной скоростной и временной характеристике. Необходимое направление вращения серводвигателя 57 определяется устройством настройки исходя из положения и последователь0ности промежуточных позиций. Определение действительных значений для регулирования скорости вращения и положения серводвигателя 57 или упорного стержня 56 осуществляется в рассматриваеьюм примере через датчик 41
5 приращения. По числу подавае1«1х последнйм импульсов устройство настройки определяет положение, а по частоте импульсов - скорость, и серводвига- тель 57 регулируется в соответствии
0 с запрограммированной скоростно-временной характеристикой. По мере приближения к заданному положению скорость вращения серводвигателя 57 снижается до остановки в момент достиже5ния заданного положения.
При достижении указанного згщанного положения или при нарушениях работы клапан 77 управления обесточивается и возвращается пружиной в
0 исходное положение, вследствие чего в тормозной цилиндр подается находящаяся под повышенным давлением среда, например, из гидравлического блока, как это показано на фиг. 5. Повышенное давление вызывает перемещение
5 поршня 68 тормозного цилиндра. При этом фрикционная накладка 70 давит на упорный стержень 56, прижимая его к направляющей поверхности корпуса. Повышенное давление выбрано так, что
0 тормозное усилие во много раз превышает наибольшую силу, возникающую, на перестановочном стержне 55.
Электрический следящий двигатель 61 также включается вышеописанным
5 устройством настройки через датчик 78, Необходимое направление вращения двигателя 61 определяется устройством настройки из положения и последовательности промежуточных позиций. Если расстояние между последовательно за0нимаемыми промежуточными позициягт меньше или равно расстоянияю Ь, то только после того, как упорный стержень 56 достигнет нового положения, путем включения клапана 79 управле5
ния снимается давление поршня 69 тормозного цилиндра, следящий двигатель 61 включается и приводится во вращение ев соответствующем направлении. После пуска под нагрузкой скорость вращения двигателя 61 управляетдя устройством 58 управления скоростью в зависимости от положения упора 73 относительно соответствующей контактной поверхности согласно фиг. 6.. Упор 73 подводится с очень низкой скоростью к поверхности 75 или 74 в зависимости от направления движения, где его удерживает следящий двигатель 61, обеспечивая жесткую кинематическую связь.
Для предотвращения неточной установки вследствие возможности резкого обратного движения клапан 79 управления обесточивается только по истечении короткого времени предусмотренным в блоке 36 управления рзле замедленного действия и возвращается пружиной в исходное положение. Вследствие этого на поршень 69 тормозного цилиндра подается среда-, находящаяся под повышенным давлением. Повышенное давление вызывает перемещение поршня 6-9 тормозного цилиндра. При этом фрикционная накладка 71 прижимается к перестановочному стержню 55, прижимая его к направляющей поверхности корпуса 64. На этом перемещение в заданное положение заканчивается и следящий двигатель 61 выключается.
Если расстояние между последовательно занимаемыми промежуточными положениями больше расстояния b, то путем одновременного включения клапано 77 и 79 снимается давление с поршней 68 и 69 тормозных цилиндров. Серводвигатель 57 и следящий двигатель 61 включаются одновременно и приводятся во вращение в одном и том же направлении.
После пуска серводвигатель 57 вращается с запрограммированной скоростью. Следящий двигатель 61 после пуска синхронизируется устройством 58 управления скоростью с серводвигателем 57. По мере приближения к заданному положению скорость вращения серводвигателя 57 снижается до его остановки в момент достижения заданного положения и упорный стержень 56 фиксируется, как описывалось выше
Управление скоростью вращения следящего двигателя 61 устройством 6 управления скоростью по времени рассчитано таким образом, что упорный стержень 56 будет уже зафиксирован перед тем, как упор 73 перестановочного стержня 55 соприкоснется в зависимости от направления движения с контактной поверхностью 75 или 74. Фиксацией перестановочного стержня 55 заканчивается процесс перемещения в заданное положение.
На фиг. 7 показана механическая и энергетическая связь между механизмами перемещения устройства управления, состоящего из одного механизма 45 поворота и двух механизмов 80 и 81 смещения.
В данном случае механизм поворота установлен на заводском фундаменте и несет механизм 80 смещения, который , в свою очередь, несет второй механизм 81 смещения, что позволяет
заключить пространство вокруг устройства в цилиндрические координаты. Механизмы перемещения смонтированы так, что первый механизм 80 смещения служит Исполнительным органом механизма 45 поворота, а второй механизм 81 смещения - исполнительным органом первого механизма 80 смещения, на втором механизме- 81 смещения в качестве рабочего инструмента закреплен захват 17, перемещающий изделие 18. Соединительные провода 82 идут от блока 36 управления к механизму 45 поворота и оттуда к механизмам 80 и 81 смещения. Напорные трубопроводы 51 идут от закрепленного на механизме 45 поворота гидравлического блока 44 к механизмам перемещения, а оттуда обратно идут отводящие трубопроводы 83.
0 На фиг. 9 в качестве примера показана блок-схема программы для перемещения в заданное положение механизма поворота. Показано как устройство управления.путем сравнения
5 числовых значений достигнутого положения п с заполняемым в запоминающем устройстве следующим достигаемым положением п. определяет необходимое направление вращения двигателей 5 и 12 и управляет клапанами 42 и 43. После того, как общая программа управления в блоке 36 управления механизмов перемещения подала команду на перемещение в следующее заданное положение пх4. , в вычислительном устройстве результат счета занимаемого положения Пх вычитается из нового заданного значения п, определяется знак, а результат сравнивается с постоянной 3. При этом J является соответствующим максимальному расстоянию Дмакс числом приращений, R обеспечивающие управление скоростью по диаграмме фиг. 6 резисторы 31 или 32, а ZR - реле замедленного
5 действия, компенсирующее время возможного резкого обратного движения. Предусматриваемые согласно блок-схеме программы команды подаются блоком 36 управления по фиг. 8, а по достижении заданного положения направля ется обратный сигнал в систему общей программы управления.
Исследование возможностей применения предлагаемых устройств показало, что во многих случаях достаточно, если каждый механизм перемещения
имеет возможность перемещения в ограниченное .число положений - ке менее шести и не более двенадцати.
На фиг, 12 и 13 показан вариант выполнения устройства на примере изображенного на фиг. 1 механизма поворота. Сравнение между блок-схемами по фиг. 14 и 8 показывает, что указанное ограничение числа положений, в которые может быть приведен вспомогательный регулирующий привод, обеспечивает упрощение управления.
Механизм поворота по фиг. 12 соответствует механизму поворота по фиг. 1 с той разницей, что по фиг.1 предусмотрена втулка 2, на которой закреплены несколько регулируем: х ,кулачковых дисков, В соответствии с этим на изображенном на фиг. 3 механизме смещения следовало бы предусмотреть линейные кулачковые элементы.
С каждым кулачковым диском 84 взаимодействуют стопорный рычаг 85, удерживающий магнит 86, концевой кнопочный выключатель 87 и .пружина 88 растяжения, закрепленная D распределительном ящике на корпусе 16. Стопорные рычаги 85 установлены поворотно на оси 89, жестко соединенной с распределительным ящиком на копусе 16. Подъемный электромагнит 90 каркасом 91 своей катушки через распределительный ящик также жестко соединен с корпусом 16. Якорь 92 электромагнита 90 в обесточенном состоянии перемещается находящейся под начальной нагрузкой пружиной 93 сжатия в показанное на фиг. 13 положение. Планка 94, соединенная с якорем 92, проходит под всеми рычагами 85. Направляющая (не показана) удерживает планку 94 от вращения вокруг оси вращения якоря 92.
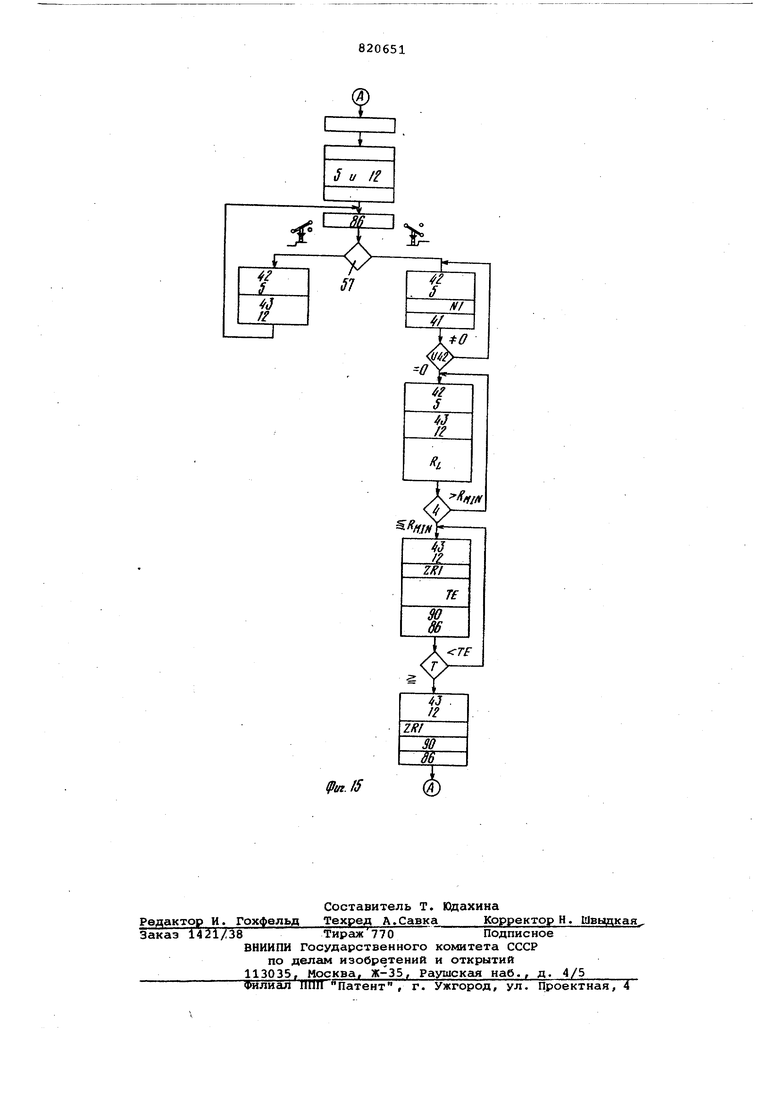
Процесс позиционирования механизм перемещения по фиг. 12 в заданное положение осуществляется по блок-схеме программы на фиг. 15,
Общая программа управления подает команду на перемещение в определенное положение, т.е. на приведение в действие кулачкового диска 84 путем воздействия на соответствующий этому кулачковому диску концевой кнопочный выключатель 87 и выключения относящегося к нему удерживающего магнита 86. При этом заданы направление вращения двигателей 5 и 12, а также наибольшее число оборотов двигателя 12; После выключения удерживающего магнита 86 стопорный рычаг 85 перемещается под действием пружины 88 растяжения в сторону кулачкового диска 84. Если стог-орныП рычаг 85 соприкасается при этом своим упорным выступом с окружностью кулачкового диска 84, то концевой кнопочный выклочатель 87 остается в показанном на фиг. 12 поло :(ении. Это положение концевого кнопочного выключателя 87 вызывает в блоке управления одновременное включение клапанов 42 и 43, а также двигггтелей 5 и 12. Следя; :.-- . двигатель 12 посредством вышеописанного устройства 6 управления синхронизирован по скорости с серводвигателем 5. Во время вращения выемка на окружности кулачкового диска достигает: стопорного рычага 85,..который под действием пружины 88 растяжения до0ходит до дна указанной выемки и при этом переключает концевой кнопочный выключатель 87. Переключение.концевого кнопочного выключателя 87 вц3-rJBaeT снижение числа оборотов сер5водвигателя 5. После дополнительного поворота на угол р кулачковый диск 84 соприкасается своей упорной кромкой с упорным выступом стопорного рычага 85 и останавливается.
0 Остановка кулачкового диска сигнализируется в блок . 36 управления клапана 42 и серводвигателя 5 и обес- , печивает фиксацинэ упорного диска 1 тормозным цилиндром 19. После приведения вспомогательного привода в
5 заданное пстожение осуществляется слежение исполнительного органа 4 описанным выше образом,
Если расстояние между занимаемым положением и следующим положением
0 равно или меньше угла (Ь , то стопорный рычаг 85 сразу после выключения удерживающего электромагнита 86 доходит до дна выемки кулачкового диска 84 и переключает концевой кно5почный выключатель 87. Это переключение вызывает отпускание только тормозного цилиндра 19, и двигатель 5 включается с низкой скоростью вращения.
Остановка кулачкового диска вслед0ствие прижатия его упорной кромки . к упорному выступу стопорного-рычага 85 сигнализируется отсутствием электрического напряжения датчика (тахогенератора) 41, что вызывает выключение клапана 42 и двигателя 5,
5 а также включение клапана 43 и двигателя 12 для подвода исполнительного органа 4 к фиксированному перестановочному диску 1,
Одновременно с включением реле
0 времени для компенсации резкого обратного движения при столкновении упора 28 с контактной поверхностью 30 или 29 осуществляется и включение удерживающего электромагнита 86
5 и подъездного электромагнита 90. Подъемный электромагнит 90 перемещает стопорный рычаг 85 из ненамагничивающегося материала по планке 94 к якорю включенного удерживающего элек0тромагнита 8G, удерживающая сила которого больше давления концевого кнопочного выкл:-очателя и тяги пружины 88 растяжения. После срабатывания реле времени поддъемный электромагнит 90 внк.чючается и возвращается под
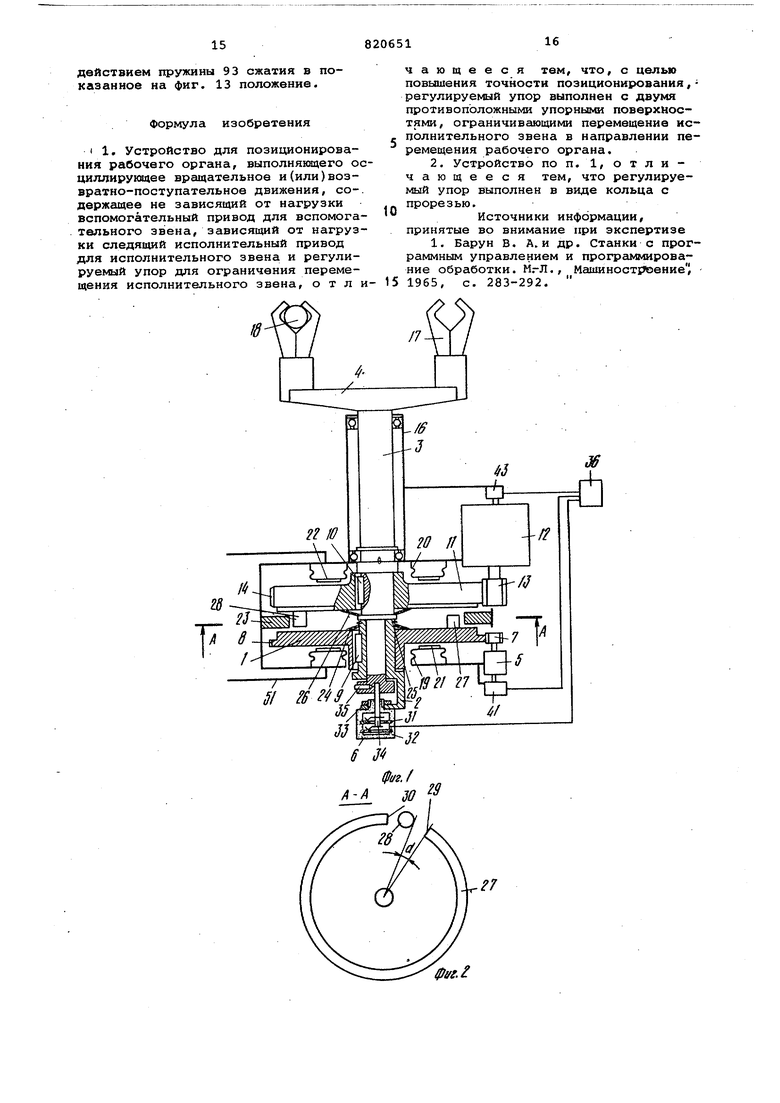
5 15 действием пружины 93 сжатия в показанное на фиг. 13 положение. Формула изобретения I 1. Устройство для позиционирования рабочего органа, выполняющего о циллирующее вращательное и(или)возвратно-поступательное движения, содержащее не зависящий от нагрузки вспомогательный привод для вспомога тельного звена, зависящий от нагруз ки следящий исполнительный привод для исполнительного звена и регулируемый упор для ограничения перемещения исполнительного звена, отл
X
фуг. г 1 чающееся тем, что, с целью повышения точности позиционирования, регулируемый упор выполнен с двумя противоположными упорными поверхностями, ограничивающими перемещение исполнительного звена в направлении перемещения рабочего органа. 2. Устройство по п. 1, о тли чающееся тем, что регулируемый упор выполнен в виде кольца с прорезью. Источники информации, принятые во внимание при экспертизе 1. Барун В. А. и др. Станки с программным управлением и программирование обработки. М.-Л., Машиностроение 1965, с. 283-292.
36
ss,
-80
t
7f
//
/
69
6-6
S9
S2 .
J.
-6/
7ff
/
fft./J
I
r7Vr
