1
Изобретение относится к области кузнечноштамновочного оборудования.
Известны устройства для перемещения заготовок в процессе ковки, содержащие размещенные на раме хоботы с захватными органами, каждый из которых снабжен механизмом продольного, вертикального, поперечного перемещений и механизмом вращения хобота. Однако эти устройства не могут обеспечить высокой производительности ковочной мащины из-за вынужденных простоев во время подготовительных операций, связанных с выдачей готовой поковки, перемещением хобота в исходное положение и захватом очередной заготовки.
Цель изобретения - обеспечение поочередного вывода хоботов на ось загрузки и к ручьям матрицы ковочной машины и новыщение надежности.
В предлагаемом устройстве механизм поперечного перемещения каждого хобота размещен на корпусе механизма вертикального перемещения и выполнен в виде направляющих зубчатых реек с двухходовым приводом, взаимодействующих с шестернями, установленными на одном валу, закрепленном в подшипниках на корпусе механизма вертикального перемещения.
На фиг. 1 изображено описываемое устройство, вид в плане с частичным разрезом; на
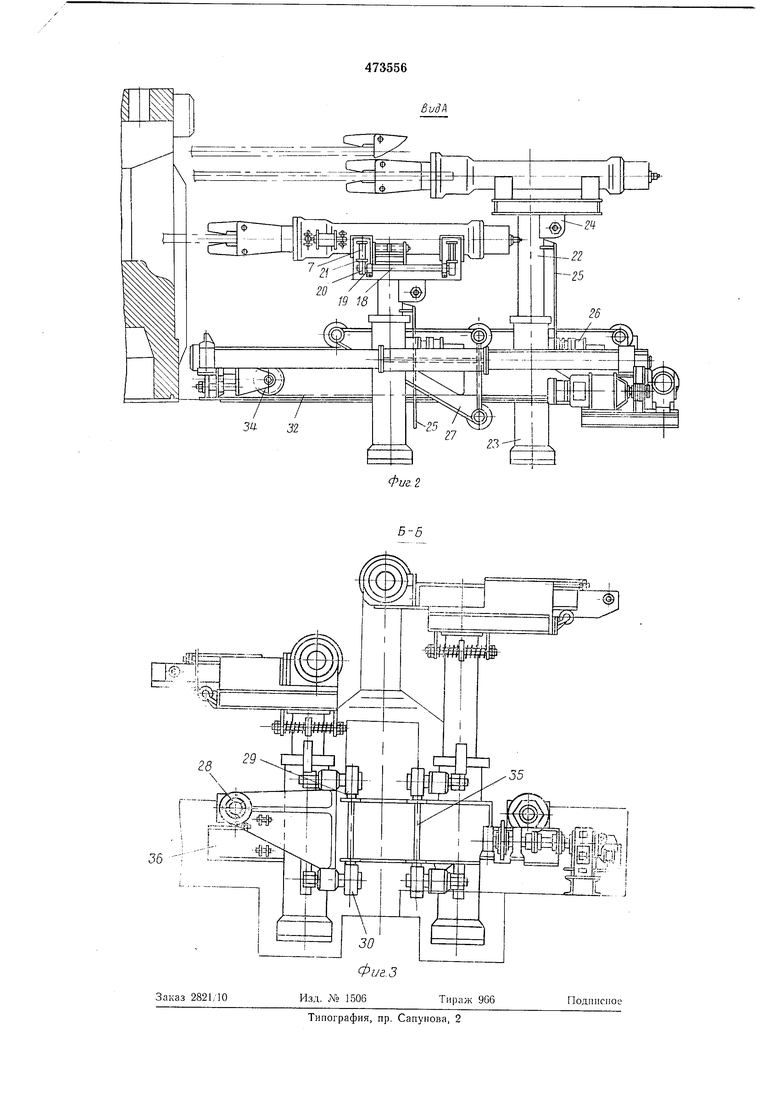
фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - разрез по Б-Б на фиг. 1.
Устройство содержит два хобота 1, калчдый из которых размещен в корпусе 2 и оборудован захватным органом 3, механизмом 4 вращения, приводов 5 дополнительных осевых смещений с фиксатором 6. Корпус крепится к торцам двух штанг 7 механизма поперечного перемещения.
Механизм поперечного перемещения каждого хобота содержит: две направляющие 8, закрепленные на корпусе 9 механизма вертикального перемещения и образующие со штангами 7 поступательные пары скольжения; двухходовой пневмопривод (привод) 10, содержащий поршень 11 со штоком 12, шарнирно соединенный с корпусом 2 для перемещения хобота с оси 13 окна загрузки на ось 14 высадки в процессе ковки, и поршень 15 со
штоком 16, шарнирно соединенный с корпусом 9 для перемещения хобота с оси 17 начального положения на ось 13 окна загрузки и обратно, вал 18, закрепленный в подщипниках 19 на корпусе 9 и несущий на себе две
щестерни 20, входящие в зацепления с зубчатыми рейками 21 на штангах 7 для предотвращения перекоса штанг и их заклинивания в направляющих 8.
Корпус 9 опирается на шток 22 пневмоцплиндра 23 механизма вертикального перемещеиия и образует с ним пару вращения, позволяющую хоботу поворачиваться в горизонтальной плоскости на некоторый угол. Возврат в исходное положение осуществляется пружинным устройством 24.
Механизмы вертикального перемещения хоботов оборудованы устройством жесткой ступенчатой фиксапип, сосгоящим из стержня 25 с вырезами, соответствующими ручьям матрицы, закрепленного па щтоке 22, установленного па ппевмоцилипдре 23 фиксатора 26 с пневмоприводом.
Иневмоцилиндр 23 механизма вертикального перемещения каждого хобота крепится па своей каретке 27, смонтированной на направляющей 28, имеющей катки 29 для восприятия основной нагрузки и каток 30, предотвращающий опрокидывание.
Механизм 31 продольного перемещения каждого хобота установлен стапиопарпо и соединен с соответствующей кареткой 27 цепью 32 через приводную 33 и натяжпую 34 звездочки.
Опорные балки 35 и направляющая 28 каретки 27 каждого хобота устройства закреплепы па общей раме 36.
Работа устройства электрически увязапа с работой подавателя нагретых заготовок ковочной машины и съемника поковок (не показан) посредством системы датчиков п производится в следующем порядке. Перед пачалом работы оба хобота (правый и левый) устройства находятся в отведенном положепии, на уровне нижнего ручья матриц, каждый на своей оси 17 начального положения. Захват заготовки, подача в зону матриц и перепое по ручьям в процессе ковки производятся ими поочередно, например, спачала правым, потом левым хоботом.
Включается ппевмоцилиндр 23 механизма вертикального перемещения правого хобота, шток 22 поднимается, выводит правый хобот на уровне оси верхнего ручья. Затем подачей воздуха в полость слева от поршня 15 двухходового пневмопривода 10 и в полость справа от поршня 11 того же привода хобот выводится па ось 13 окпа загрузки п останавливается. Это положение является исходным. При малом числе ручьев на матрице и небольшом расстоянии между ними исходное положение может быть выше уровня верхнего ручья матриц. К этому времени на ту же ось должна быть подапа пагретая штучная заготовка между ковочной машиной и хоботом устройства.
Включается привод мехаппзма продольного перемещения, хобот на заготовку до срабатывания датчика, отключающего привод и включающего механизм захвата (захватный орган 3), который захватывает заготовку, подаватель после этого отводится и включается снова привод механизма продольного перемещения. В результате заготовка подается в зону матриц до упора, затем отключается привод, включается фиксатор 6, производится переключение золотника (не показап) на подачу воздуха в полость слева от поршня И, который, двигаясь вправо, перемещает хобот с заготовкой на ось 14 высадки. Заготовка входит в верхний ручей неподвижной матрицы. Оператор включает рабочий ход ковочной машины.
Произошла высадка в первом ручье. После раскрытия матриц заготовка выводится из
верхпего ручья пеподвижной матрицы па ось 13 окна загрузки подачей воздуха в полость справа от поршня 11, после чего включаются пневмоцилиндр 23 механизма вертикального перемещения на опускание, пневмопривод
фиксатора 26 на вывод фиксатора из выреза па каретке 27, пневмопривод механизма 4 вращения. В результате заготовка опускается па уровепь второго ручья. В процессе этого опускапия произойдет также поворот заготовки на 90° вокруг своей продольной оси.
Далее производится подача воздуха в полость слева от поршпя 11 ппевмопривода 10, и хобот, двигаясь вправо, заводит заготовку во второй ручей неподвижной матрицы.
Производится высадка во втором ручье, после которой таким же образом заготовка выводится из второго ручья па ось окпа загрузки, перемещается впиз, вводится в третий ручей и далее в четвертый.
Одповременпо с включением ковочной машины для высадки во втором ручье включается пневмоцилиндр 23 механизма вертикального перемещения левого хобота (точнее момент включения определится циклограммой
работы устройства), который перемещается вверх, проходит слева от правого хобота, выполняющего рабочие операции, достигает уровня верхнего ручья и смещается на ось окна загрузки в результате подачи воздуха в
полость справа от поршня 15 ппевмопривода 10 механизма поперечного перемещения.
К этому времени на эту же ось подается очередная нагретая штучная заготовка, которую левый хобот таким же образом, как и
правый, захватывает и ожидает окопчания процесса ковки заготовки, переносимой правым хоботом устройства, т. е. до момента вывода им из последнего ручья готовой поковки па ось окна загрузки.
Вывод готовой поковки из золы матриц в зону действия съемника правым хоботом и ввод очередной заготовки левым хоботом производится одновременпо путем включепия их механизмов продольных перемещений на движение в противоположном друг другу направлении.
В результате левый хобот подает заготовку в зопу матриц до упора и дальше передает ее по ручьям машины в процессе ковки, т. е.
производит рабочие мапипуляции по описаппой выше схеме работы правого хобота, а правый хобот выносит готовую поковку из зоны матриц, его механизм продольного перемещения отключается, подается воздух в
полость справа поршня 15 и слева поршпя 11 5 пневмопривода 10 правого хобота, и он смещается на ось 17 своего первоначального положения, после чего включается его пневмоцилиндр 23 механизма вертикальных перемещений и правый хобот с готовой поковкой поднимается до уровня верхнего ручья (или выще на уровень исходного положения). В этом положении правый хобот ожидает, когда освободится место левым хоботом, чтобы выйти на ось 13 окна загрузки, т. е. пока левый хобот опустится ниже определенного уровня, зафиксированного датчиком, который дает импульс на срабатывание распределителей для подачи воздуха в полость справа от поршня Пив полость слева от порщня 15. В результате правый хобот выходит на ось окна загрузки. Далее подводится съемник под поковку, разжимается захват, включается привод механизма продольного перемещения правого хобота, он отходит и, заняв крайнее заднее положение, останавливается. Съемник отводит поковку, на ее место подается новая нагретая заготовка, на которую наезжает правый хобот. С помощью включения своего привода механизма продольного перемещения правый хобот останавливается от импульса датчика, зажимает ее своим захватом. Затем подаватель отводится, а правый хобот ожидает окончания процесса ковки заготовки, переносимой левым хоботом. После чего одновременно с выдачей готовой ноковки левым хоботом из зоны матриц на уровне последпего ручья правый хобот подает заготовку в зону матриц до упора на уровне первого ручья, и цикл повторяется. Предмет изобретения Устройство для перемещения заготовок в процессе ковки, содерл ащее размещенные на раме хоботы с захватными органами, из которых снабжен механизмом продольного, вертикального, поперечного перемещений и механизмом вращения хобота, отличающ.е е с я тем, что, с целью обеспечения поочередного вывода хоботов на ось загрузки и к ручьям матрицы ковочной машины и повышения надежности, механизм поперечного перемещения каждого хобота размещен на корпусе механизма вертикального перемещения и выполнен в виде направляющих зубчатых реек с двухходовым приводом, взаимодействующих с шестернями, установленными на одном валу, закрепленном в подшипниках на корпусе механизма вертикального перемещения.
f

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Автоматическая линия горячей штамповки | 1981 |
|
SU996037A1 |
| Привод продольного перемещения хобота ковочного манипулятора | 1981 |
|
SU997945A1 |
| Ковочный комплекс | 1991 |
|
SU1787639A1 |
| УСТРОЙСТВО ДЛЯ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU306903A1 |
| Автоматизированная линия горячей штамповки крупных поковок с вытянутой осью | 1991 |
|
SU1822353A3 |
| Перекладчик к горизонтально-ковочной машине | 1972 |
|
SU450634A1 |
| Устройство к ковочной машине для изготовления деталей из штанп | 1956 |
|
SU108958A1 |
| МАНИПУЛЯТОР К КОВОЧНЫМ ВАЛЬЦАМ | 1973 |
|
SU388825A1 |