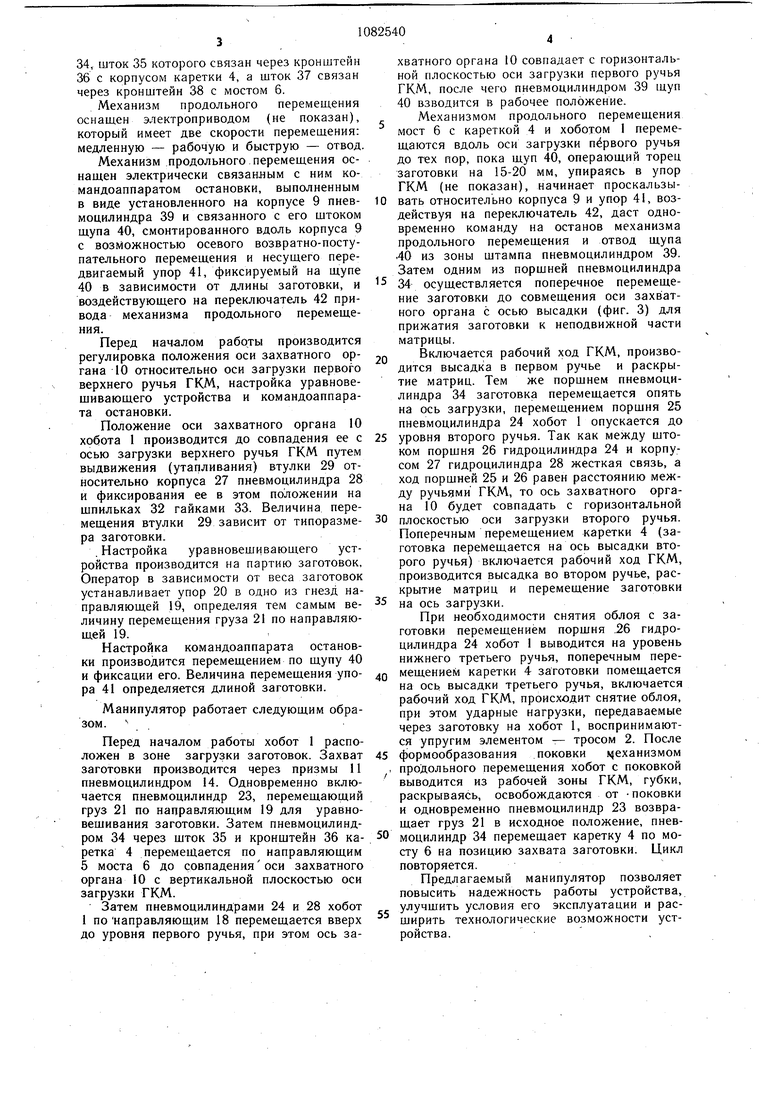
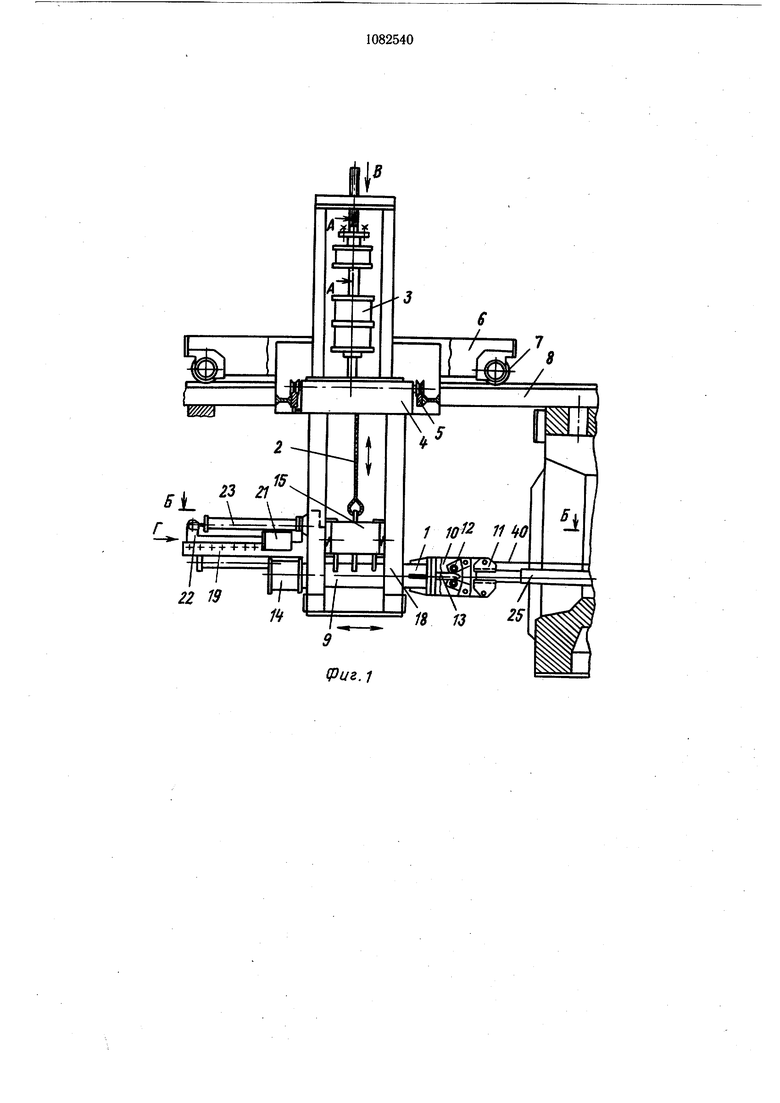
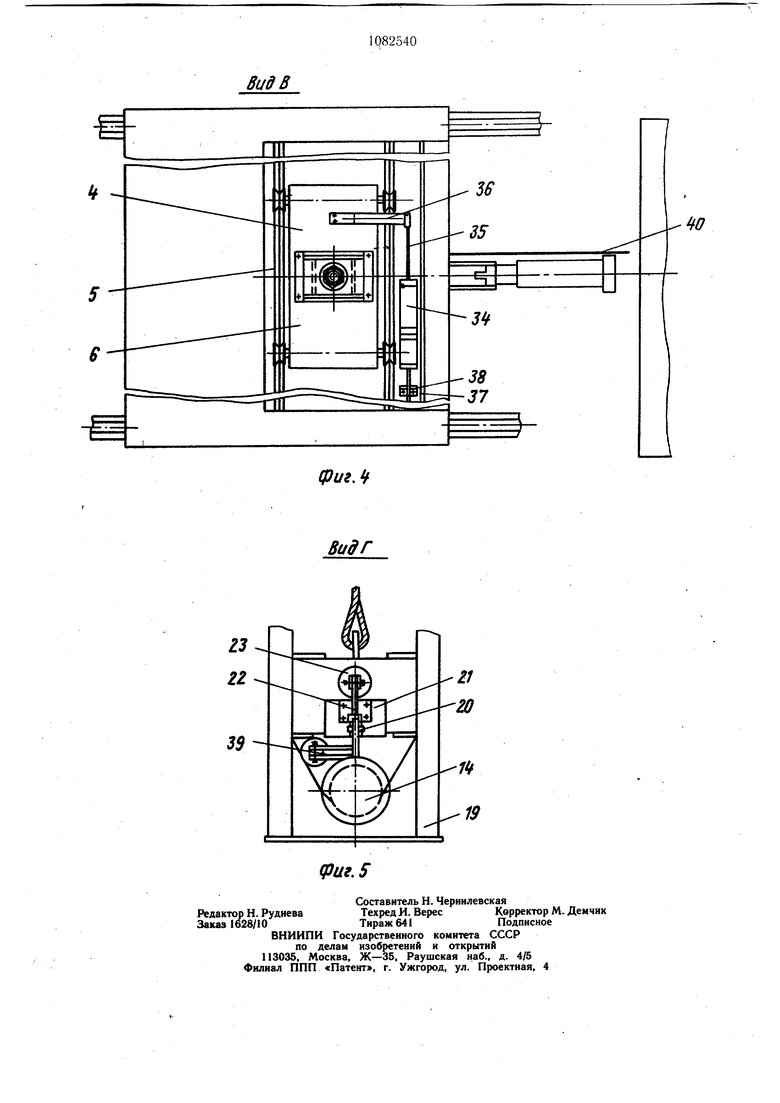
Изобретение относится к вспомогательному оборудованию кузнечнопрессовых цехов машиностроительных предприятий, а именно к конструкциям ковочных манипуляторов. Известен манипулятор горизонтальноковочных машин (ГКМ), содержащий хобот с захватным органом, соединенным с механизмами продольного, поперечного и вертикального перемещений 1. Недостатками известного манипулятора являются невозможностьиспользования его для перемещения заготовок к ковочным машинам, оснащенных ручьем, предназначенным для снятия облоя с заготовки, так как возникающие при снятии облоя значительные ударные нагрузки, направленные вдоль оси хобота, отрицательно сказываются на работоспособности механизмов перемещений а также ограниченные возможности использования его для загрузки заготовок разных типоразмеров. Цель изобретения - повышение надежности работы манипулятора, расширение диапазона типоразмеров перемещаемых заготовок. Поставленная цель достигается тем, что в манипуляторе для горизонтально-ковочных машин, содержащем хобот с захватным органом, соединенным с механизмом продольного перемещения, включающим выключатель, а также механизмы поперечного и вертикального перемещений относительно оси обработки, механизм поперечного перемещения выполнен в виде каретки со смонтированными на ней направляющими и установленных в них с возмажностью возвратно-поступательного перемещения ползунов, а механизм вертикального перемещения размещен на каретке и выполнен в виде цилиндра с двумя поршнями, один из которых соединен тросом с хоботом, и жестко соединенного с щтоком другого поршня пневмоцилиндра с цилиндрической расточкой, в которой соосно штоку поршня и на нем расположена втулка со средствами ее перемещения и фиксации, служащая для ограничения хода поршня, а хобот выполнен в виде цилиндрического корпуса, на одном конце которого смонтирован захватный орган, размещенного в направляющих каретки, подпружиненного в двух взаимно перпендикулярных направлениях в горизонтальной плоскости относительно ползунов и снабженного уравновешивающим устройством в виде жесткосоединенного с цилиндрическим корпусом цилиндра, закрепленного на его штоке через кронштейн груза, установленного с возможностью возвратно-поступательного перемещения в тарированной направляющей, жестко соединенной с цилиндрическим корпусом хобота и несущей упор, при этом механизм продольного перемещения снабжен командоаппаратом остановки, выполненным в виде расположенного на цилиндрическом корпусе хобота пневмоцилиндра, соединенного с его штоком щупа, закрепленного на щупе с возможностью перемещения упора, взаимодействующего с выключателем механизма продольного перемещения. На фиг. 1. изображен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. I; на фиг. 5 - вид Г на фиг. I. Манипулятор содержит хобот 1, связанный тросом 2 с механизмом 3 вертикального перемещения, размещенным на каретке 4, установленной на направляющих 5 моста 6, смонтированного на роликах 7 на крановых путях 8. Хобот 1 выполнен в виде цилиндрического корпуса 9, на переднем конце которого смонтирован захватный орган 10, зажимные призмы 11 которого взаимодействуют через ролики 12 с клином 13, соединенным со штоком пневмоцилиндра 14, установленного на корпусе 9. Последний жестко сварен с коробом 15, через петлю которого протянут трос 2, и подпружинен в двух взаимно перпендикулярных направлениях горизонтальной плоскости четырьмя парами пружин 16 относительно ползунов 17, смонтированных с возможностью возвратно-поступательного перемещения на направляющих 18 каретци 4. Хобот 1 оснащен уравновешивающим устройством, выполненным в виде жестко связанной с корпусом 9 тарированной направляющей 19 с переставным упором 20, несущей установленный с возможностью возвратно-поступательного перемещения груз 21, связанный кронщтейном 22 со штоком пневмоцилиндра 23, жестко смонтирован ного на корпусе 9 хобота I. Механизм 3 вертикального перемещения хобота 1 выполнен в виде двухходового пневмоцилиндра 24, поршень 25 которого соединен с тросом 2, а поршень 26 жестко соединен с корпусом 27 пневмоцилиндра 28 регулирования положения центральной оси захватного органа 10. С противоположной стороны в корпусе 27 выполнена расточка для размещения втулки 29 с центральным отверстием для штока 30. Втулка 29 установлена с возможностью регулирования величины ее утапливания в полость пневмоцилиндра 28 и предназнацена ддя ограничения хода поршня 31. Положение фланца втулки 29 относительно торца корпуса 27 фиксируется на шпильках 32 гайками 33. Шток 30 пневмоцилиндра 28 жестко зафиксирован на корпусе каретки 4. Механизм поперечного перемещения выполнен в виде двухходового пневмоцилиндра
34, шток 35 которого связан через кронштейн 36 с корпусом каретки 4, а шток 37 связан через кронштейн 38 с мостом 6.
Механизм продольного перемеш,ения оснаш.ен электроприводом (не показан), который имеет две скорости перемещения: медленную - рабочую и быструю - отвод.
Механизм продольного.перемещения оснащен электрически связанным с ним командоаппаратом остановки, выполненным в виде установленного на корпусе 9 пневмоцилиндра 39 и связанного с его штоком щупа 40, смонтированного вдоль корпуса 9 с возможностью осевого возвратно-поступательного перемещения и несущего передвигаемый упор 41, фиксируемый на щупе 40 в зависимости от длины заготовки, и воздействующего на переключатель 42 привода механизма продольного перемещения.
Перед началом работы производится регулировка положения оси захватного органа 10 относительно оси загрузки первого верхнего ручья ГКМ, настройка уравновешивающего устройства и командоаппарата остановки.
Положение оси захватного органа 10 хобота 1 производится до совпадения ее с осью загрузки верхнего ручья ГКМ путем выдвижения (утапливания) втулки 29 относительно корпуса 27 пневмоцилиндра 28 и фиксирования ее в этом положении на шпильках 32 гайками 33. Величина перемещения втулки 29 зависит от типоразмера заготовки.
. Настройка уравновешивающего устройства производится на партию заготовок, Оператор в зависимости от веса заготовок устанавливает упор 20 в одно из гнезд направляющей 19, определяя тем самым величину перемещения груза 21 по направляющей 19.
Настройка командоаппарата остановки производится перемещением по щупу 40 и фиксации его. Величина перемещения упора 41 определяется длиной заготовки.
Манипулятор работает следующим образом.
Перед началом работы хобот 1 расположен в зоне загрузки заготовок. Захват заготовки производится через призмы 11 пневмоцилиндром 14. Одновременно включается пневмоцилиндр 23, перемещающий груз 21 по направляющим 19 для уравновещивания заготовки. Затем пневмоцилиндром 34 через шток 35 и кронштейн 36 каретка 4 перемещается по направляющим 5 моста 6 до совпадения оси захватного органа 10 с вертикальной плоскостью оси загрузки ГКМ.
Затем пневмоцилиндрами 24 и 28 хобот 1 по направляющим 18 перемещается вверх до уровня первого ручья, при этом ось захватного органа 10 совпадает с горизонтальной плоскостью оси загрузки первого ручья ГКМ, после чего пневмоцилиндром 39 щуп 40 взводится в рабочее положение.
Механизмом продольного перемещения мост 6 с кареткой 4 и хоботом 1 перемещаются вдоль оси загрузки первого ручья до тех пор, пока щуп 40, операющий торец заготовки на 15-20 мм, упираясь в упор ГКМ (не показан), начинает проскальзы0 вать относительно корпуса 9 и упор 41, воздействуя на переключатель 42, даст одновременно команду на останов механизма продольного перемещения и отвод щупа 40 из зоны штампа пневмоцилиндром 39. Затем одним из поршней пневмоцилиндра
34 осуществляется поперечное перемещение заготовки до совмещения оси 3axBiaTного органа с осью высадки (фиг. 3) для прижатия заготовки к неподвижной части матрицы.
Q Включается рабочий ход ГКМ, производится высадка в первом ручье и раскрытие матриц. Тем же поршнем пневмоцилиндра 34 заготовка перемещается опять на ось загрузки, перемещением поршня 25 пневмоцилиндра 24 хобот 1 опускается до
5 уровня второго ручья. Так как между штоком поршня 26 гидроцилиндра 24 и корпусом 27 гидроцилиндра 28 жесткая связь, а ход поршней 25 и 26 равен расстоянию между ручьями ГКМ, то ось захватного органа 10 будет совпадать с горизонтальной
0 плоскостью оси загрузки второго ручья. Поперечным перемещением каретки 4 (заготовка перемещается на ось высадки второго ручья) включается рабочий ход ГКМ, производится высадка во втором ручье, раскрытие матриц и перемещение заготовки
5 на ось загрузки.
При необходимости снятия облоя с заготовки перемещением поршня .26 гидроцилиндра 24 хобот 1 выводится на уровень нижнего третьего ручья, поперечным перео мещением каретки 4 заготовки помещается на ось высадки третьего ручья, включается рабочий ход ГКМ, происходит снятие облоя, при этом ударные нагрузки, передаваемые через заготовку на хобот 1, воспринимаются упругим элементом - тросом 2. После
5 формообразования поковки 1 4еханизмом , продольного перемещения хобот с поковкой выводится из рабочей зоны ГКМ, губки, раскрываясь, освобождаются от поковки и одновременно пневмоцилиндр 23 возвращает груз 21 в исходное положение, пнев0 моцилиндр 34 перемещает каретку 4 по мосту 6 на позицию захвата заготовки. Цикл повторяется.
Предлагаемый манипулятор позволяет повысить надежность работы устройства, улучшить условия его эксплуатации и расширить технологические возможности устройства.
29
30
(риг. 2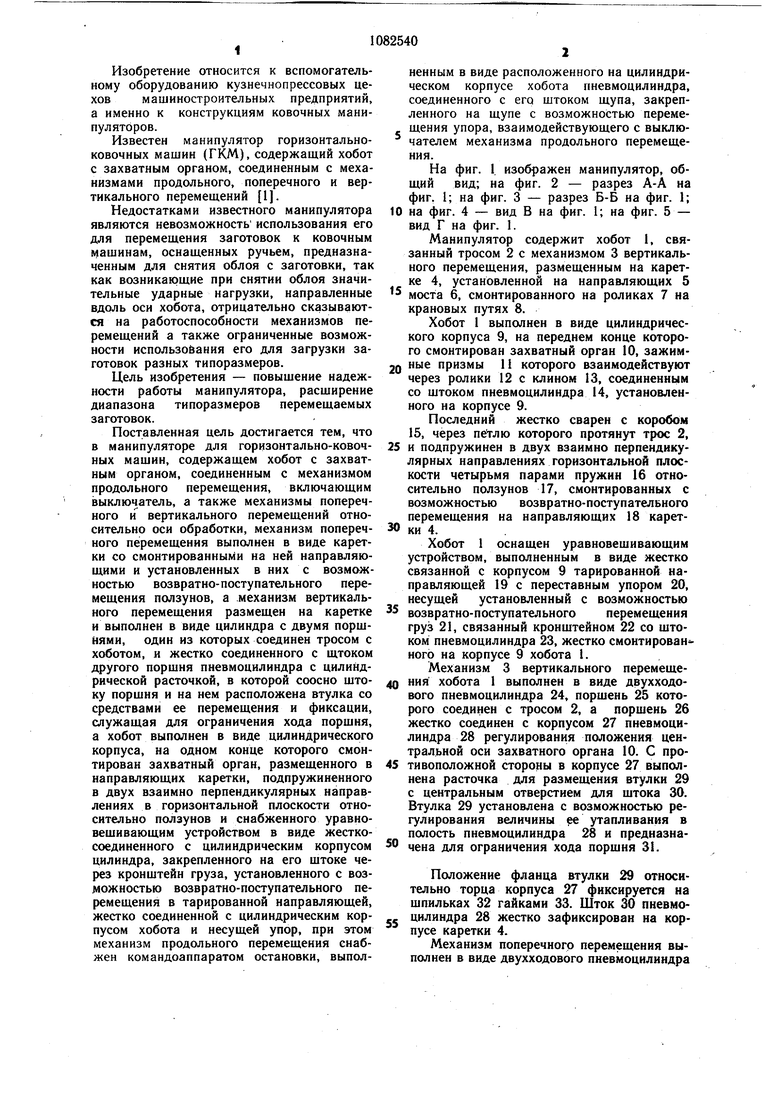
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения заготовок в процессе ковки | 1971 |
|
SU473556A1 |
| Манипулятор | 1989 |
|
SU1796335A1 |
| Манипулятор для переноса заготовок | 1982 |
|
SU1074651A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| МАНИПУЛЯТОР К КОВОЧНЫМ ВАЛЬЦАМ | 1973 |
|
SU388825A1 |
| Перекладчик к горизонтально-ковочной машине | 1972 |
|
SU450634A1 |
| Манипулятор ковочных вальцов | 1980 |
|
SU871956A1 |
| Манипулятор ковочных вальцов | 1990 |
|
SU1756012A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Манипулятор ковочных вальцов | 1980 |
|
SU935189A1 |

МАНИПУЛЯТОР ДЛЯ ГОРИЗОНТАЛЬНО-КОВОЧНЫХ МАШИН, содержащий хобот с захватным органом, соединенным с механизмом продольного перемещения включающим выключатель, а также с механизмами поперечного и вертикального перемещений относительно Оси обработки, отличающийся тем, что, с целью повыщения долговечности и расщирени технологических возможностей путем манипулирования заготовками различных типоразмеров, механизм поперечного перемещения выполнен в виде каретки со смонтированными на ней направляющими и установленных в них с возможностью возвратно-поступательного перемещения ползунов, а механизм вертикального перемещения размещен на каретке и выполнен в виде цилиндра с двумя порщнями, один из которых соединен тросом с хоботом, и жестко соединенного с щтоком другого порщня пневмоцилиндра с цилиндрической расточкой, в которой соосно щтоку порщня и на нем расположена втулка со средствами ее перемещения и фиксации, служащая для ограничения хода поршня, а хобот выполнен В виде цилиндрического корпуса, на одном конце которого смонтирован захватный орган, размещенного в направляющих каретки, подпружиненного в двух взаимно перпендикулярных направлениях в горизонтальной плоскости относительно ползунов и снабженного уравновещивающим устройством в виде жестко соединенного с цилиндрическим корпусом цилиндра, закрепленного на его штоке через кронштейн груза, установленного с возможностью возвратно-поступательного перемещения в тарированной направляющей, (Л жестко соединенной с цилиндрическим корпусом хобота и несущей упор, при этом механизм продольного перемещения, снабжен командоаппаратом . остановки, выполненным в виде расположенного на цилиндрическом корпусе хобота пневмоцилиндра, соединенного с его щтоком щупа, закрепленного на щупе с возможностью перемещения упора, взаимодействующего с выклю00 чателем механизма продольного перемещеьо ел ния. 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для перемещения заготовок в процессе ковки | 1971 |
|
SU473556A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
