Изобретение относится к обработке металлов давлением, а именно,к. конструкциям ковочных манипуляторов.
Известен привод продольного перемещения хобота ковочного манипуляторэ/ установленного на снабженной гидроприводом тележке, содержащий установленный на тележке рабочий цилиндр продольного перемещения хобота , с двумя равной рабочей площали штоковыми полостями, левый шток которого жестко связан с хоботом, до-. полнительный источник давления и устройства управления гидроприводом тележки и рабочим цилинДром.
Устройство управления цилиндром выполнено в виде двух соединенных последовательно трехпозиционного и двухпозиционного четырехходовых гидрорасрределителей, связанных соответственно с цилиндром и дополнительным источником давления, дрос,селя и обратного клапана, соединенного с устройством управления гидромотором.
При движе 1ии тележки манипулятора во время деформации поковки бойкшли пресса хобот с поковкой остается, неподвижным относительно бойков пресса. После освобождения поковки бойками пресса хобот манипулятора с поковкой ускоренно перемещается в наг правлении движения тележки. После восстановления положения хобота относительно тележки хобот с поковкой тормозится до полной остановки от- , носительно бойков пресса.
При остановке хобота, манипулятора с поковкой относительно бойков прес10са цилиндрfплощадь штоковой полости которого равна отношению расхода жидкости, проходящей через гидромотор, к скорости движения тёлея(ки, соединен с гидромотором последова15тельно и перемещает хобот с паковкой со скоростью, равной скорости движения тележки, в противоположном направлении. В этом случае усилие цилиндра не передается на поков20ку и может быть увеличено.
Во время остановки хобота манипулятора с поковкой относительно бойков прессаэлектромагнит двухпозициониого гидрораспределителя устрой25 ства управления цилиндром отключен и включен Электромагнит согласующего гидpopacпpe eлитeля. Эти электромагниты переключаются при ускоренном перемещении хобота с .поковкой
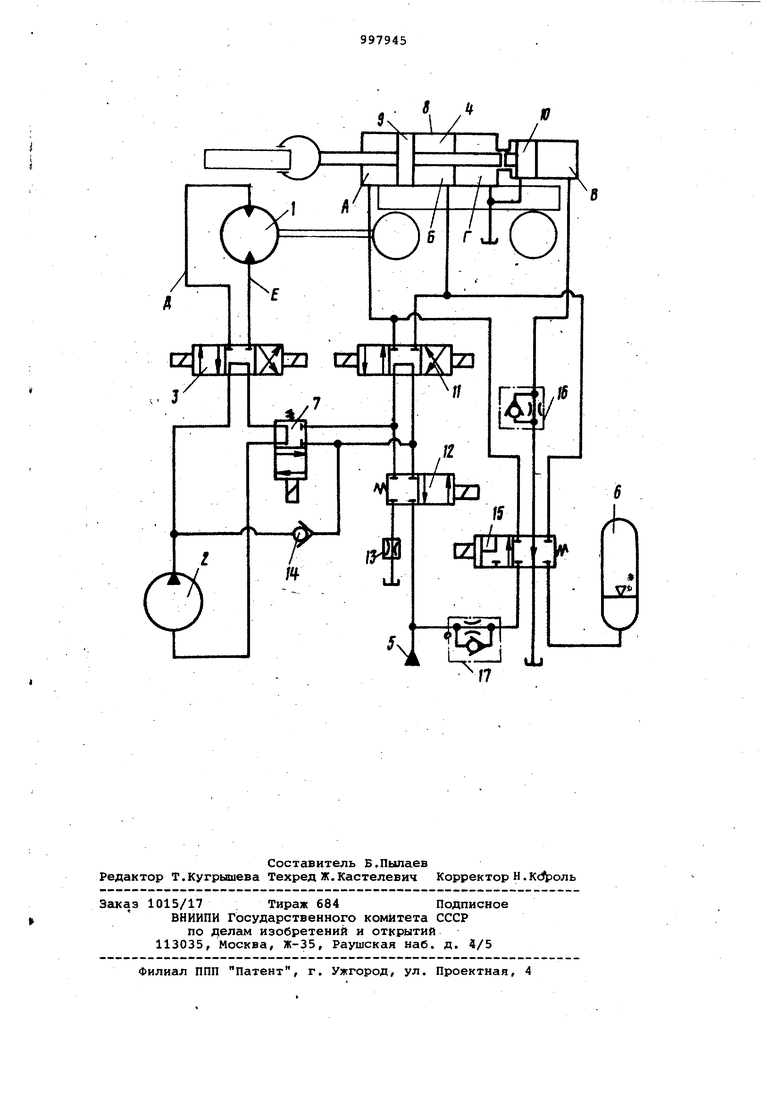
30 в направлении движения тележки . Однако при малом шаге ковки BpeM перемещения хобота с поковкой относительно бойков пресса становится соизмеримьом с временем срабатывания гидрораспределителей, управляющих этим перемещением, из-за чего уве личивается время и снижается точнос перемещения хобота с поковкой относительно бойков пресса. Целью изобретения является повышение производительности и повьлшени точности перемещения хобота. Указанная цель достигается тем, что привод продольного перемещения хобота ковочного манипупятора, уста новленного на снабженной гидроприводом тележке, содержащий расположе ный на тележке рабочий цилиндр продольного перемещения хобота с двумя равной рабочей площади штоковыми полостями, левый шток которого жестк связан с хоботом, дополнительный ис точник давления и устройства управления гидроприводом тележки и рабоч цилиндром, снабжен дополнительным ци линдром одностороннего действия с рабочей полостью, равной площади рабочего цилиндра, установленным на тележке соосно рабочему цилиндру с возможностью взаимодействия с правым его штоком, а также аккумулятором, и двухпоэиционным гидрораспределителем, соединенным через дополнительные дроссель и параллельный дроссели обратный клапан с дополнительным цилиндром. На чертеже изображена схема при вода продольного перемещения хобота ковочного манипулятора. Привод .содержит. гидром,тор 1, сое диненный с механизмом перемещения тележки и питающийся от насоса 2 через устройство управления гидромотором, состоящее из гидрораспределителя 3, цилиндр 4 для осевого перемещения хобота манипулятора с поковкой, питающейся от дополнителького источника 5 давления через устройство управления цилиндром. С устройством управления цилиндром соединен аккумулятор б, давление в котором вдвое ниже, чем в дополнительном источнике 5 давления. Устройства управления гидромотором и цилиндром связаны между собой и со всасывающей магистралью насоса согла сующим гидрораспределителем 7. Цилиндр 4 состоит из связанного с тележкой манипулятора корпуса 8, поршня 9 с двусторонним штоком, соединенного с хоботом манипулятора, и второго поршня 10, ход которого ограничен кольцевьвй упором, выполнен ным в корпусе 8. Цилиндр 4 содержит две штоковые полости А и Б, поршневу полость В, равную по площади штоково полости, и промежуточную полость Г, соединенную со сливной магистралью, Устройство управления цилиндром включает последовательно соединенные гидрораспределители 11 и 12, связанные соответственно с цилиндром 4 и дополнительным источником 5 давления, дроссель 13, обратный клапан 14, соединенный с устройством управления гидромотором, гидрораспределитель 15 и дроссели с обратными клапанами 16 и 17. Привод работает следующим образом. При выключенных электромагнитах всех гидрораспределителей напорная и всасывающая магистрали насоса 2 соединены череб гидрораспределители 3 и 7, и насос разгружен. Подводы Д и Е гд дромотора 1 заперты гидрораспределителем 3. Полости А и Б цилиндра 4 заперты гидрораспределителями 11 и 15, а полость В через дроссель с обратным клапаном 16 и гидрораспределитель 15 соединена со сливной магистралью. Во время ковки с большими шагами электромагнит гидрораспределителя 15 отключен. При включении электромагнита гидрораспределителя 7 и левых электромагнитов гидрораспределителей 3 и 11 жидкость от насоса 2 посту- , пает в подвод Д гидромотора 1, а из его подвода Е в полость А цилиндра 4, у которого полость Б соединена со всасывающей магистралью насоса 2. Гидромотор 1 и поршень 9 начинают перемещать в противоположных направлениях тележку манипулятора и хобот с поковкой. При соприкосновении поршней 9 и 10 поршен 10 перемещается вправо, не передавая усилия .на поршень 9. Площадь штоковой полости цилиндра 4 выбрана равной отношению расхода жидкости через гидрог готор 1 к скорости движения тележки. Поэтому хобот манипулятора с поковкой движется со скоростью движения тележки,, оставаясь неподвижным относительно бойков пресса, и при деформации поковки бойками пресса усилие цилиндра 4 не передается на поковку. После освобождения поковки бойками пресса электромагнит гидрораспределителя 7 отключается и включается электромагнит гидрораспределителя 12.Подвод Егидромотора 1 соединяется со всасывающей магистралью насоса 2, а полости А и Б цилиндра 4 соединяются соответственно со сливной магистралью и дополнительным источником 5 давления. Поршень 9 вместе. с хоботом и поковкой ускоренно перемещается в направлении движения тележки. Возникающая при этом реактивная сила, препятствующая движению тележки, компенсируется быстрым ростом усилия, перемещающего тележку, за счет передачи на гидромотор 1
через клапан 14 давления в цилиндре 4 . .
После восстановления положения хобота относительно тележки отключается электромагнит гидрораспределителя 12 и включается электромагнит гидрораспределителя 7, и хобот с поковкой тормозится до полной остановки относительно бойков пресса.
Тележка манипулятора останавливается при отключении электромагнитов гидрораспределителей 3 и 11.
При включении правых электромагнитов i гидрораспределителей 3 и 11 направление движения тележки изменяется.
Во время ковки малыми шагами электромагниты гидрораспределителей 7, 1 и 12 отключены и включен электромаг-ч нит гидрораспределителя 15, который соединяет полость Б цилиндра L4 с аккумулятором 6, а полость А - через дроссель с обратным клапаном 16 с полостью В и через дроссель с обратным клапаном 17 - с дополнительным источником 5 давления.
При движении тележки манипулятора во время деформации поковки бойками пресса хобот, оставаясь неподвижным, относительно бойков пресса, перемещается относительно тележки в надрав лении, противоположном ее движению. При движении поршней 9 и 10 вправо дроссель 16 свободно пропускает жидкость из полости В в полость А, а из полости Б рабочая жлдкость вытес няется S аккумулятор 6. При перемещении поршня 9 влево дроссель 17 свободно пропускает .-жидкость из по.лости А в дополнительный источник.5 давления, а полость Б заполняется рабочей жидкостью из аккумулятора 6.:
После освобождения поковки бойками пресса суммарное усилие от действия на поршень 9 давления в полостях А и Б и поршня 10 возвращает поршень 9 в среднее положение. Это усилие вдвое меньше максимального усилия, создаваемого цилиндром 4.при
ковке с большими шагами, и не вызывает изгиба поковки.
Для предотвращения осевых колебаний хобота с поковкой скорость возврата поршня 9 в среднее положение ограничивается дросселями с обратными клапанами 16 и 17.
Для устранения удара при . достижении поршнем 9 среднего, а поршнем 10 крайнего положений, цилиндр 4 снабжен демпферными устройствами.
Использование предлагаемого изоб- ретения по сравнению с известньш позволяет снизить время и повысить точность перемещения хобота с поковкой относительно бойков пресса при малом шаге ковки.
Формула изобретения
Привод продольного перемещения хобота ковочного манипулятора, установленного на снабженной гидроприводом тележке, содержащий расположенный, на тележке рабочий цилиндр продольного перемещения хобота с двумя равной рабочей площади штоковыми i полостями, левый шток которого жестко связан, с хоботом, дополнительный :источник давления и устройства управления гидроприводом тележки и рабочим цилиндром, отличающийс.я тем, что, с целью повышения производительности и повышения точности перемещения хобота, он снабжен дополнительным цилиндром одностороннего действия с рабочей площадью,равной площади рабочего цилиндра, установленным на тележке соосно рабочему цилиндру с возможностью взаимо- действия с правым его штоком, а также аккумулятором и двухпозиционным гидрораспределителем., соединенными через дополнительные дроссель и параллельный .дросселю обратный клапан с дополнительным цилиндром. Источники информации, принятые во внимание при экспертизе
1. Патент Великобритании №1317301 кл. В 21 J 13/10, 1973 (прототип).
а
К /
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод продольного перемещения тележки и хобота ковочного манипулятора | 1980 |
|
SU946775A1 |
| Привод вертикального перемещения хобота ковочного манипулятора | 1980 |
|
SU912390A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1982 |
|
SU1053949A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Устройство вертикальной амортизации хобота ковочного манипулятора | 1987 |
|
SU1516216A1 |
| Манипулятор | 1979 |
|
SU812412A1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Устройство управления ковочным прессом | 1982 |
|
SU1165600A1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |