1
Изобретение относится к железнодорожной автоматике, IB частности к устройствам для контроля перемещения подвижных единиц на железнодорожном транспорте, предназначено, в основном, для использования в реверсивных счетчиках осей подвижного состава, работающих с учетом направления движения и может применяться, например, для контроля занятости путевых и стрелочных участков, для определения осности вагонов, выявления длиннобазных вагонов и других целей.
Известны устройства для определения проследования движущихся объектов, содержащие два расположенных на пути движения с общей зоной действия датчика, подключенные со счетчиком через формирователь импульсов.
В этих устройствах датчики установлены с некоторым смещением между собою вдоль пути движения так, что зоны действия датчиков частично накладываются и образуют общую зону действия. Это обеспечивает работу устройства как при сквозном проходе, так и при изменении направления движения объекта, например при маневрах.
Однако в таких устройствах изменение зон действия может нарушить их наложение и вызвать сбой в работе счетчика.
Цель изобретения - повышение надежности счета импульсов.
2
Это достигается тем, что формирователь импульсов выполнен на логических элементах «ИЛИ и «НЕ, элементах задержки и триггере. Ири этом выход от каждого датчика соединен с логическим элементом «ИЛИ неиосредст1венно и через логический элемент «НЕ, триггер и элемент задержки, выход логического элемента «ИЛИ, относящегося к первому датчику, соединен с запрещающим входом элемента задержки и нулевым входом триггера, относящихся ко второму датчику.
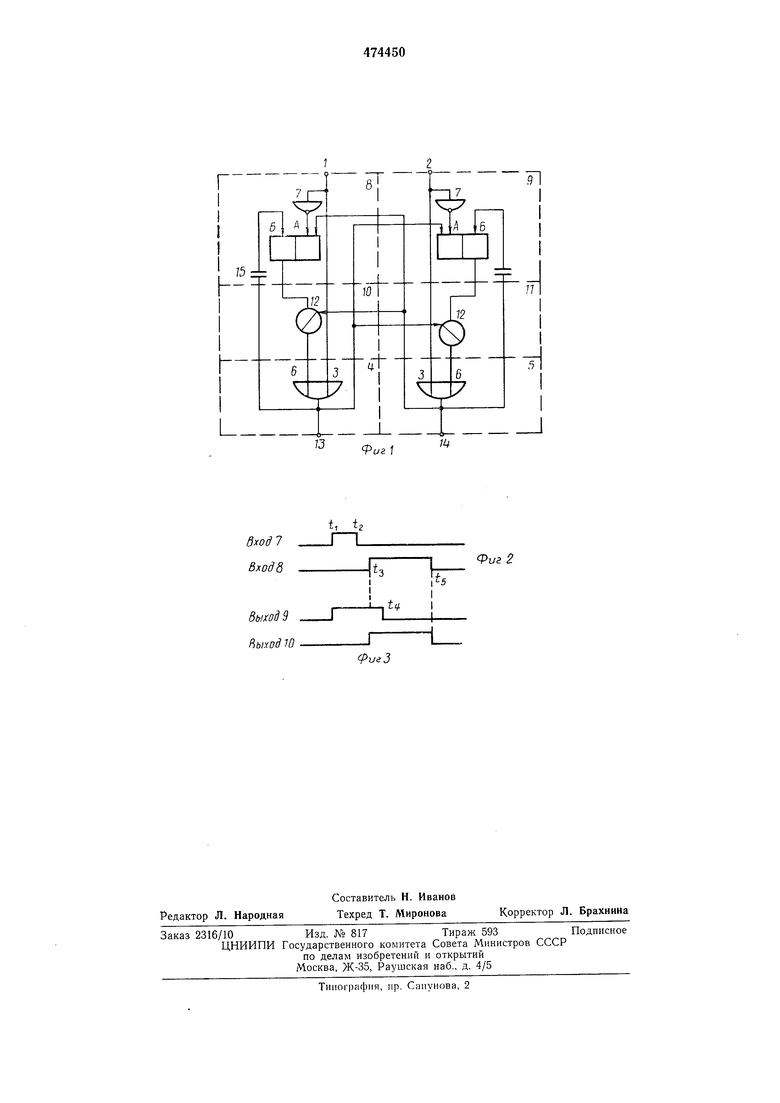
На фиг. 1 показана функциональная схема предлагаемого устройства; на фиг. 2 - диаграмма срабатывания датчиков при сбое наложения зон действия; на фиг. 3 - диаграмма при направленной последовательности импульсов.
Два датчика, расположенных на пути движения с общей зоной действия (на чертеже
не показаны), подключены ко входам 1 и 2 формирователя импульсов и соединены со входами 3 логических элементов 4 и 5 «ИЛИ непосредствеппо п со входами 6 - через логические элементы 7 «НЕ, триггеры 8, 9 п элементы 10 и 11 задержки.
Выход логического элемента 4 или 5 «ИЛИ, относящийся к одному из датчиков, соединен с запрещающим входом 12 элемента задержки и нулевым входом триггера, относящихся к
другому датчику.
Предлагаемое устройство работает следующим образом.
В исходном состоянии на входах 1 и 2 формирователя импульсов сигналов нет, триггеры 8 и 9 находятся в положении А, элементы 10 и 11 задержки не возбуждены, поэтому сигналов на элементах 4 и 5 «ИЛИ, а следовательно, и на выходах 13 и 14 нет.
Если проход движущегося объекта вызываем импульсы недостаточной длительности (см. фиг. 2), то необходимое удлинение первого импульса обеспечивается следующим образом.
При срабатывании первого датчика (момент /i) появляется сигнал на входе 1 формирователя и на входе 3 элемента «ИЛИ, вследствие чего возникает сигнал на выходе 13. Этот сигнал воздействует на счетчик импульсов, а также через конденсатор 15 переводит триггер 8 в положение Б. В результате этого возбуждается элемент 10 задержки и обеспечивается сигнал на входе 6 элемента «ИЛИ.
Далее движущийся объект выходит из зоны действия первого датчика и сигнал на входе 1 исчезает (момент 2)- Элементом 7 «НЕ триггер 8 переводится в исходное состояние, однако элемент 10 задержки остается на некоторое время (до 1 сек) возбужденным. Этот элемент поддерживает сигнал на входе 6 элемента «ИЛИ, а значит, и на выходе 13 устройства.
Таким образом, импульс первого датчика удлиняется.
Далее движущийся объект входит в зону действия другого датчика, поэтому на входе 2 появляется сигнал, который передается через элемент 5 «ИЛИ на выход 14 (момент 4). Однако триггер 9 не перебрасывается, так как на его нулевом входе еще действует сигнал с выхода 13. Так как с выхода 14 сигнал подается на запрещающий вход 12 элемента 10 задержки, то действие этого элемента прекращается и сигнал выхода 13 снимается (момент 4). Так как в течение времени t t4-tz сигналы были как на выходе 13, так и на выходе 14, то наложение импульсов будет восстановлено и сбой в работе счетчика устранен.
При снятии сигнала с выхода 13 полярность импульса сквозь конденсатор 15 будет обратной, чем в момент времени ti, поэтому триггер 8 не перебрасывается.
Далее движущийся объект покидает зону действия другого датчика, сигнал на входе 2 исчезает (момент времени fj) Поскольку триггер 9 остается в нулевом состоянии, то элемент 11 задержки не возбуждается, поэтому сигнал с выхода 14 снимается без задержки в момент времени t.
Таким образом, импульс другого датчика не удлиняется, общая длительность двух импульсов не увеличивается, вследствие чего быстродействие устройства не снижается.
Движение объекта в обратном направлении вызовет срабатывание элементов в обратной последовательности, причем в случае сбоя наложения будет удлинен импульс другого датчика.
Если наложение импульсов нормальное, то
никакого удлинения не произойдет, так как
действие элементов 10 и 11 задержки будет
запрещено сигналами с выходов 14 и 13 соответственно.
Предмет изобретения
Устройство для определения проследования движущихся объектов, содержащее два расположенных на пути движения с общей зоной действия датчика, подключенные со счетчиком через формирователь и.мпульсов, отличающееся тем, что, с целью повыщения надежности счета импульсов, формирователь импульсов выполнен на логических элементах «ИЛИ и «НЕ, элементах задержки и триггере, при этом выход от каждого датчика соединен с логическим элементом «ИЛИ непосредственно и через логический элемент «ПЕ, триггер и элемент задержки, выход логического элемента «ИЛИ, относящегося к первому датчику, соединен с запрещающим входом
элемента задержки и нулевым входом триггера, относящихся ко второму датчику.
12
9l
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля проследования и счета физических единиц железнодорожного подвижного состава | 1984 |
|
SU1230898A1 |
| Устройство для испытания электроагрегатов | 1990 |
|
SU1721589A1 |
| УСТРОЙСТВО ДЛЯ СЧЕТА ПОДВИЖНЫХ ЕДИНИЦ | 1991 |
|
RU2013263C1 |
| Устройство для определения проследования движущихся объектов | 1973 |
|
SU447315A1 |
| Устройство для измерения геометрических параметров движущихся бревен | 1988 |
|
SU1552009A1 |
| Устройство для программного управления | 1984 |
|
SU1167585A1 |
| Устройство для автоматического поиска неисправностей | 1972 |
|
SU467331A1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВОГО УЧАСТКА И ФАЗОЧУВСТВИТЕЛЬНАЯ РЕЛЬСОВАЯ ЦЕПЬ | 1991 |
|
RU2025362C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2170437C1 |
| Устройство для контроля и учета количества людей в помещении | 1980 |
|
SU875409A1 |
Ф.а f
вхо/ 7 8 ход 8
выход 9 Pibiwd W
Фиг 2
-l-,
