1
Изобретение касается корабельных движителеП.
Известны приводы управления лопастями крыльчатого движителя, содержащие рулевые агрегаты, кинематически связанные через центральный рычаг управления -с рычажной системой механизма привода лопастей. В существующих типах приводов управления лопастями крыльчатого движителя кинематическая связь рулевых агрегатов с центральным рычагом управления выполнена посредством простых тяг, не дающих возмохсность ввести в эту связь необходимых передаточных чисел без увеличения габаритов движителя.
Цель изобретения - увеличение чувствительности управления лопастями и уменьшение габаритов крыльчатого движителя. Для этого привод управления его лопастями выполнен с пантографическим механизмом, шарнирно связанным с центральным рычагом управления причем ведущее звено пантографического механизма соединено шарниром с рулевыми агрегатами.
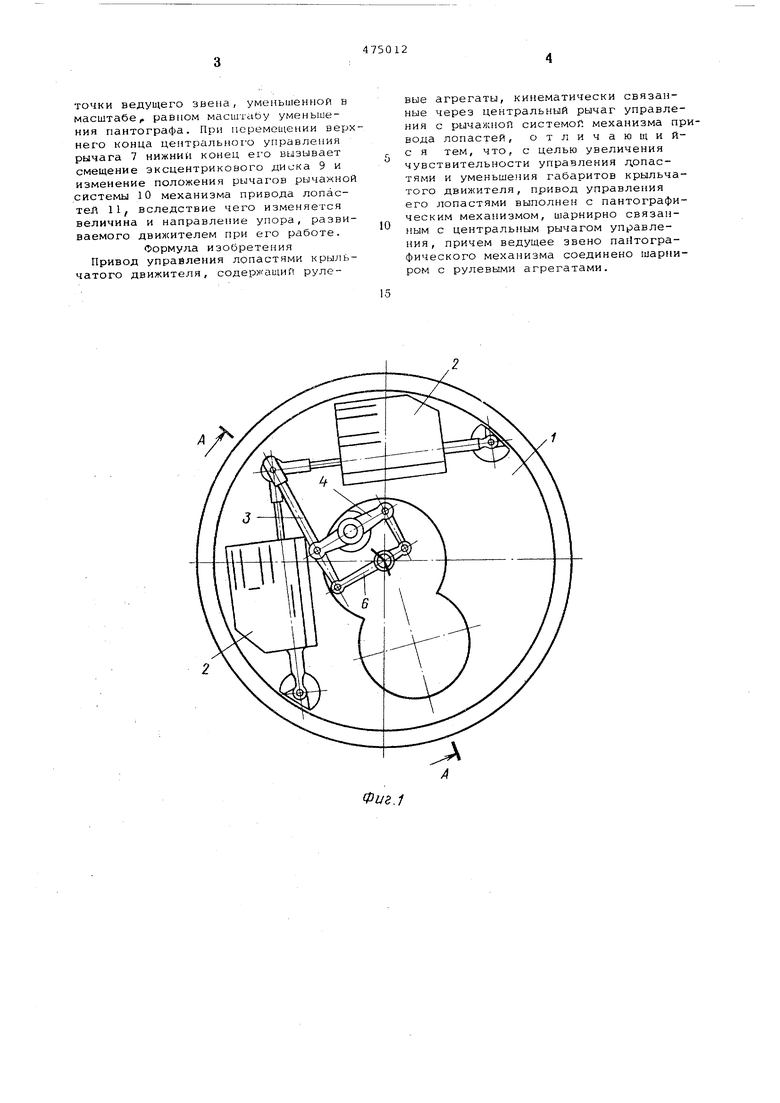
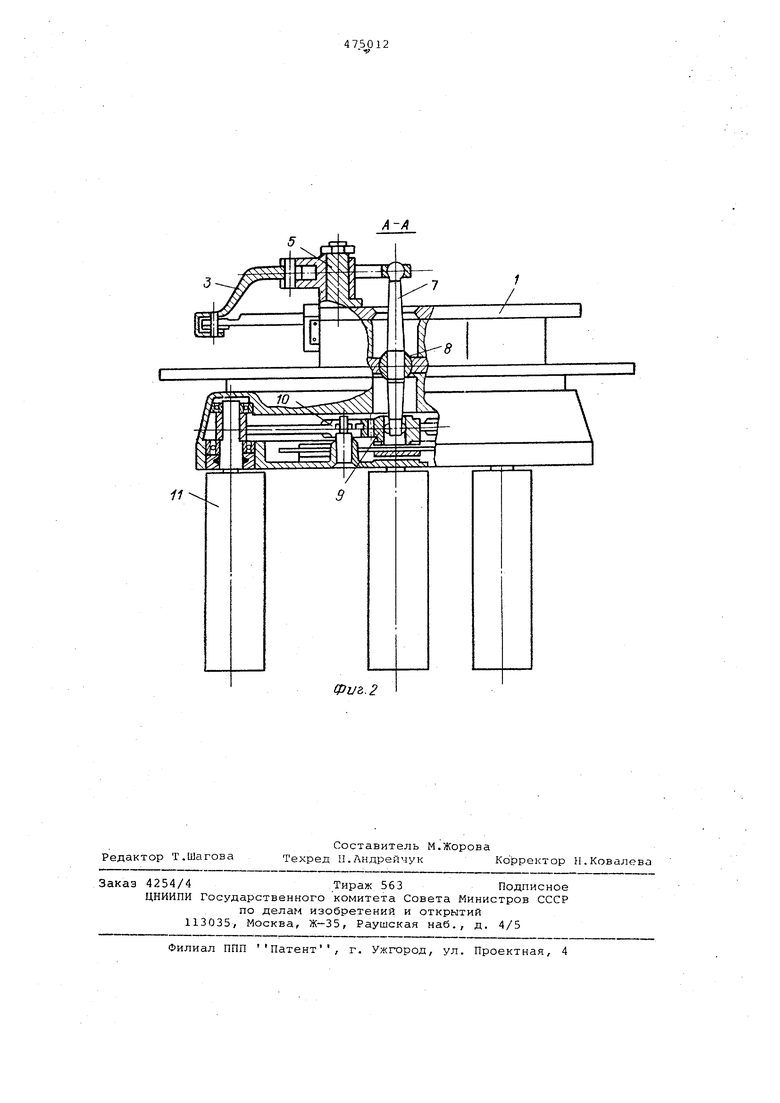
На фиг. 1 схематически изображена конструкция привода управления лопастями крыльчатого движителя в плане; на фиг. 2 - разрез по А--А на фиг.
На корпусе крыльчатого движителя шарнирно установлены корпусы рулевых агрегатов 2 (например гидроцилиндров) Штоки рулевых агрегатов шарнирно закреплены на ведущем звене 3 пантографического механизма 4. Пантвграфический механизм при помощи вращательной пары 5 крепится к корпусу крыльчатого движителя 1. Ведомое ЗВРЧО б.пантографического механизма 4 1иарнирно соеди 1ено с верхним концом центрального рычага 7 управления. ЦеМтральный рычаг управления на сферическом подшипнике В установлен в корпусе движителя. ПижниП конец центрального рычага управления шарнирно соединен с центром эксцентрикового диска 9, с kOTOpiiiM связана рычах;ная система 10 механизма привода лопастеГ 11.
При откло11ении штоков рулевых аг.регатов 2 от нейтрального полох:еиия перемещается соединенная с ними рабочая точка ведущего звена 3 пантографического механизма 4. В соответствии со своПс-fBOM павгтографического механизма рабочая точка ведомого звена 6 вместе с соединенным с Hofi верхним концом центрального рычага 7 управления перемещается по кривой, подобной кривой перемещения рабочей
точки ведущего звена, уменьшенной в масштабе равном MaciuTctby уменьшения пантографа. При перемещении верхнего конца центрального угтравления рычага 7 нижний конец его вызывает смещение эксцентрикового диска 9 и изменение положения рычагов рычажной системы 10 механизма привода лопастел 11, вследствие чего изменяется величина и направление упора, развиваемого движителем при его работе.
Формула изобретения Привод управления лопастями крыльчатого движителя, содержащий рулевые агрегаты, кинематически связанные через центральный рычаг управления с рычажной системой механизма првода лопастей, отличающи йс я тем, что, с целью увеличения чувствительности управления допастями и уменьшешя габаритов крыльчатого движителя, привод управления его лопастями выполнен с пантографическим механизмом, шарнирно связанным с центральным рычагом управления, причем ведущее звено па 1тографического механизма соединено шар 1иром с рулевыми агрегатами.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ КРЫЛЬЧАТЫЙ ДВИЖИТЕЛЬ ПОДВОДНЫХ АППАРАТОВ | 2023 |
|
RU2806471C1 |
| Движительно-рулевой комплекс | 1987 |
|
SU1539140A1 |
| УКЛАДЧИК ДОРОЖНО-СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1993 |
|
RU2076167C1 |
| КОЛЕСНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТЯГАЧ | 1993 |
|
RU2096234C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 1999 |
|
RU2149109C1 |
| СНЕГОХОД-ТРАНСФОРМЕР | 2010 |
|
RU2442716C1 |
| Шагающий движитель транспортного средства | 1980 |
|
SU878641A1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| ПАРОМ ДЛЯ ПЕРЕВОЗКИ АВТОМОБИЛЯ | 1991 |
|
RU2048376C1 |
,Л
Фиг.1
cpVb.Z
