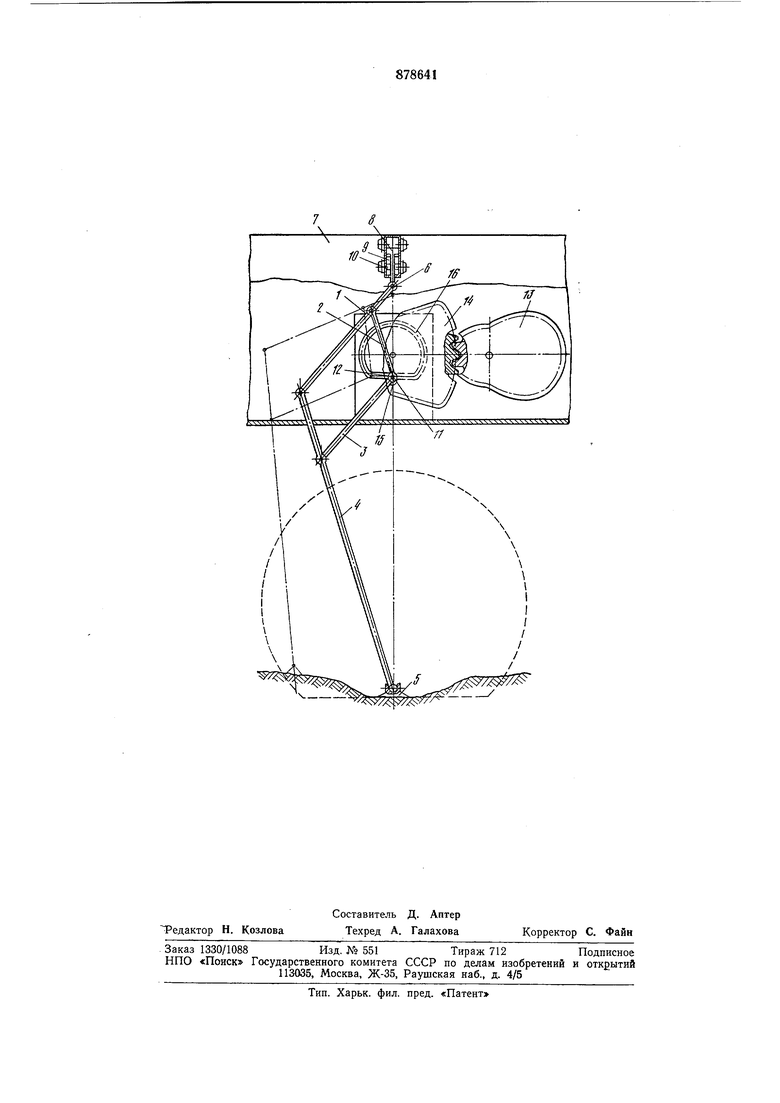
На чертеже показана кинематическая схема движителя.
Движитель состоит из плоского иантографа, имеющего шарнирно соединенные звенья 1, 2, 3, 4. На конце звена 4 шарнирно установлен опорный башмак 5. Точкой
6пантограф шарнирно связан с корпусом
7транспортного средства с помощью штока
8с пружиной 9, установленных в цилиндре
10. Другая точка И пантографа снабжена жестко при.крепленным к ией пальцем 12, установленным перлендикулярно плоскости пантографа. Этот палец 12 соединен с задающим механизмом, определяющим траекторию движения опорного башмака 5 и скорость его движения в каждой точке траектории.
Задающий механизм выполнен в виде зубчатой некруглой передачи, ведущая шестерня 13 которой соединена с приводом вращения (на чертеже условно не показан), а ведомая шестерня 14 имеет сквозной радиальный паз 15, служащий поводком для пальца 12. Профилирование щестерен 13 и 14 выполнено в соответствии с правилами теории механизмов и машин и в соответствии с заданным законом движения, в частности для того, чтобы в режиме опоры на башмак 5 скорость корпуса 7 транспортного средства была бы постеянной. Кроме того, задающий механизм включает в себя неподвижную замкнутую направляющую 16, форма которой в масщтабе пантографа повторяет заданную траекторию перемещения опорного башмака 5. Палец 12 пантографа свободно входит в эту направляющую 16.
При вращении ведущей шестерни 13 с постоянной скоростью ведомая щестерня 14 своим пазом 15 перемещает палец 12 пантографа по замкнутой направляющей 16, а опорный башмак совершает движение по подобной траектории, при этом благодаря некруглому профилю шестерен 13 и 14 устанавливается равномерная скорость движения башмака в режиме опоры корпуса 7 на плечо, а также заданное соотношение между временами фаз переноса корпуса и переноса опоры.
При наезде на препятствие в пантографе появляются дополнительные усилия, которые, сжимая пружину 9, перемешают шток 8 кверху, и тем самым башмак 5 устанавливается на другой высоте.
Применение изобретения позволяет простыми техническими средствами обеспечить существенное упрощение системы управления пантографического шагающего движителя и тем самым повысить его надежность.
Формула изобретения
1.Шагающий движитель транспортного средства, содержащий плоский пантограф, одной точкой связанный с корпусом транспортного средства, другой точкой присоединенный к опорному башмаку, а третьей с жестко прикрепленным пальцем - к задающему механизму, отличающийся тем, что, с целью упрощения системы управления, за/дающий механизм состоит из некруглой зубчатой передачи, на ведомой шестерне которой выполнен сквозной радиальный паз, и установленной на корпусе транспортного средства замкнутой направляющей, имеющей форму заданной траектории опорного башмака, причем палец пантографа установлен в пазу ведомой шестерни и в замкнутой направляющей.
2.Движитель по п. 1, отличающийс я тем, что связь пантографа с корпусом транспортного средства выполнена в виде шарнирного соединения с подпружиненным штоком, установленным в вертикально расположенном цилиндре.
Источники информации, принятые во внимание при экспертизе:
,1. Заявка Японии № 52-7616, кл. 83/ЗАО, 1977.
2. Журнал «Техника молодежи, 1966, № 7, с. 26.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагающего движителя | 2019 |
|
RU2723923C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2171194C1 |
| ШАГАЮЩАЯ ОПОРА | 1992 |
|
RU2067941C1 |
| МОСТОВОЙ ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2501703C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |
| Шагающее колесо | 2021 |
|
RU2763325C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2000 |
|
RU2191131C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |