тивной памяти БРОП, сумматор 2 и блок постоянных коэффициентов ВПК.
Блок задания программы БЗЛ имеет наборное поле МП, клеммы 1, 2... п которого соединены с выходами соответствующих формирования номера границы переключепия участков в блоке л асштаба БМ и посредством перемычек и клемм 1, 2... т соединены с ячейками «ИЛИ на входе триггерного регистра ТР. Одновременно (см. фиг. 2) выходы ячеек соединены через ячейки разделения «ИЛИ с входами ячеек совпадения формирования сигнала длины участка программы, выходы которых через элемент «ИЛИ соединены с блоком управления БУ и дополнительно через элемент задержки сигнала - с входом сброса счетчика длины участка Сь счетный вход которого соединен с формирователем импульсов ФИ от датчика Д. Это позволяет формировать сигнал окончания участка программы в зависимости от его номера и автоматически сбрасывать счетчик GI в исходное состояние.
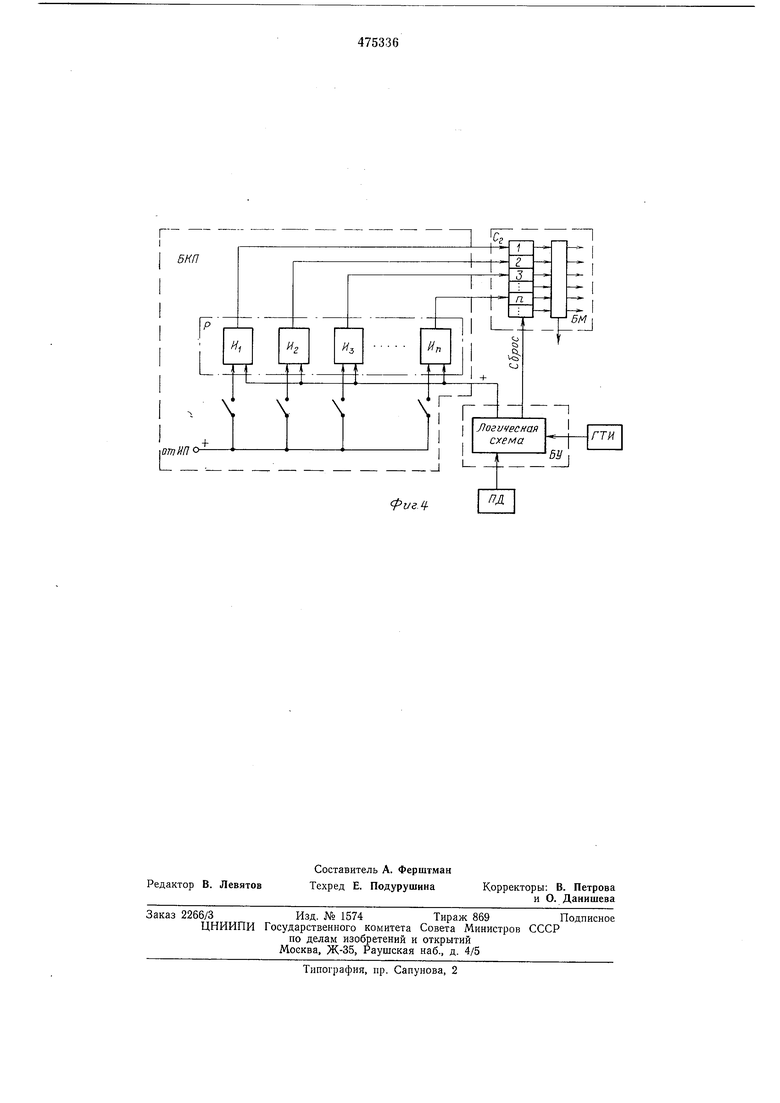
Для устранения ошибки по пути, возникающей за счет износа футеровки и деформации барабана, а также из-за погрешности изготовления датчика нути Д, и учета влияния вытяжки подъемных канатов на точность остановки сосудов у приемных площадок в схему описываемого устройства включен блок коррекции программы БКП (фиг. 1, 4), состоящий из управляемого регистра Р двухвходовых схем совпадения «И, число которых соответствует числу разрядов /г в двоичном коде, равном расстоянию от точки начала движения машины до точки коррекции программы, где устаиавливается путевой датчик ПД. Один вход каждой схемы «И регистра Р через ламель переключателя соедииеи с шиной источника питания ИП, а вторые входы всех схем «И этого же регистра подключены к общей шине подачи потенциала управления с выхода логической схемы блока управления БУ. Выход каждой схемы «И регистра Р (фиг. 4) соединен с триггерным входом соответствующего разряда счетчика числа участков С2 блока масштаба БМ. Это значит, что выход схемы «И: соединен с триггерным входом первого разряда счетчика С2, выход схемы «Иг соединен с триггерным входом второго разряда того же счетчика и т. д. Счетный вход счетчика Сд соединен с блоком управления БУ, а на выходе этого счетчика (фиг. 2) включеиы ячейки совпадения ... формирования номера границы переключения участков программы и ячейка , формирующая сигнал начала рабочего торможения, выход которой также соединен с блоком управления БУ.
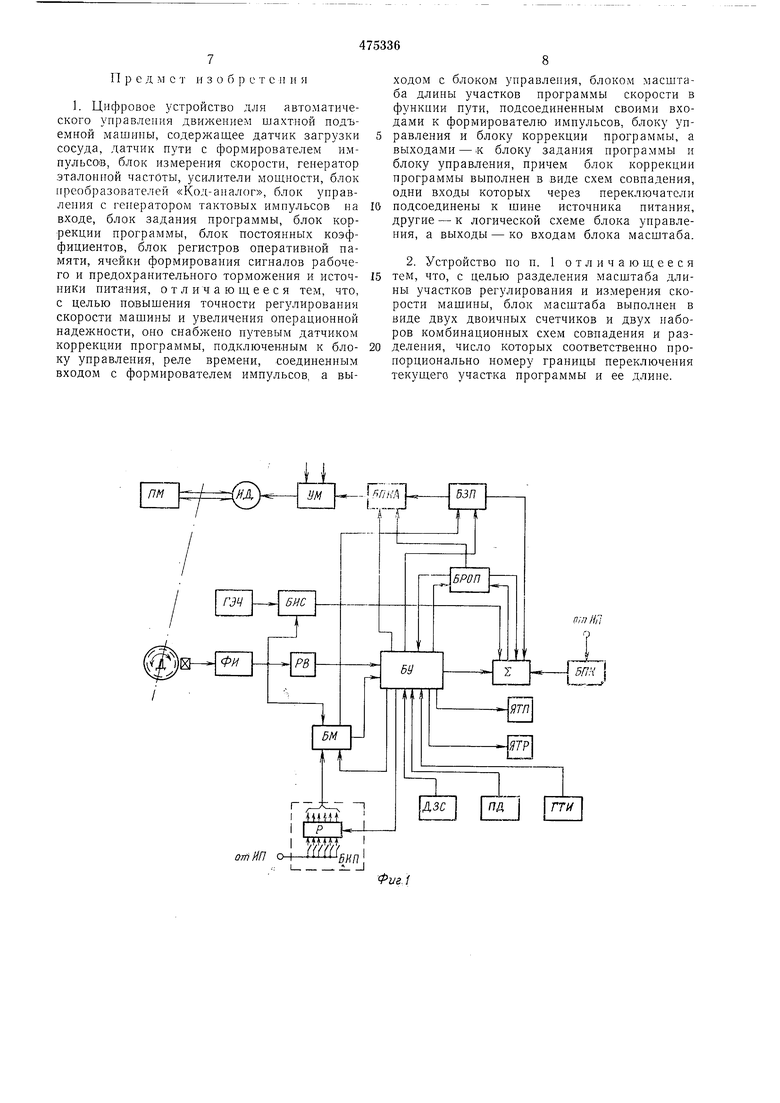
Вход блока управления БУ (фиг. 1) соединен также с датчиком загрузки сосуда ДЗС, путевым датчиком ПД коррекции программы, генератором тактовых импульсов ГТИ и реле времени РВ, которое контролирует наличие импульсов от формирователя ФИ. Выход блока управления БУ соединен с блоком задания программы БЗП, блоком регистров оперативной памяти БРОП, сумматором 2, блоком масштаба БМ, блоком коррекции программы БКП и ячейками формирования сигналов рабочего ЯТР и предохранительного ЯТЛ торможения, а также с блоком лреобразователей «Код-аналог
БПКА, выход которого через усилитель мощности УМ соединен с исполнительным двигателем ИД. Триггерный регистр ТР (фиг. 3) соединен по каналам «Управление и «Сброс с блоком управления БУ, а выходы регистра
ТР соединены с блоком преобразователей «Код-аналог БПКА.
По сигналу окончания загрузки сосуда, поступающему с датчика загрузки ДЗС, блок управления БУ посылает на вход счетчика
чйсла участков С2 блока масщтаба БМ (фиг. 2) имлульс, по которому с выхода ячейки совпадения , соответствующей начальному участку программы, снимается сигнал, который подается на первую из клемм 1,2,....
п наборного поля НП блока задания программы БЗП (фиг. 3). В зависимости от соег димения этой клеммы с клеммами ,1,2... т на входе ячеек «ИЛИ на выходе носледних формируется двоичный код напряжения задания (задающее воздействие), который через триггерный регистр ТР по команде «Управление, поступающей с блока управления БУ, подается в блок преобразователей «Коданалог БПКА. Очистка регистра ТР осуществляется блоком управления БУ по каналу «Сброс перед каждой перезаписью кода задания. Сигнал с выхода блока преобразователей БПКА через усилитель мощности УМ поступает на исполнительный двигатель
ИД, который приводит в движение по тъемную машиау ПМ и связанный с ее валом датчик Д. Выходное напряжение датчика пути Д в виде серии импульсов, снимаемых с формирователя ФИ, поступает на блок измерения скорости БИС и блок масштаба БМ. Одновременно блок управления БУ посредством реле времени РВ контролирует наличие этих импульсов. В блоке измерения скорости БИС с помощью известной схемы и генератора эталонной частоты ГЭЧ формируется код числа, пропорционального интервалу времени между двумя соседними импульсами формирователя ФИ, т. е. измеряется величина, обратно пропорциональная действительной скорости машины на элементарном участке пути.
В блоке масштаба БМ (фиг. 2) импульсы
с формирователя ФИ подаются на счетный
вход счетчика длины участка Ci, на выходе
которого включены ячейки совпадения
в количестве, соответствующем числу участков программы с разной длиной пути. Па входы этих ячеек поступают с одной стороны двоичные коды всех длин участков, с другой с выхода ячеек разделения «ИЛИ позиционные коды номеров участков программы.
имеющие одинаковую длину, формируемые на выходе ячеек совпадения «И.
Таким образом, когда на счетный вход счетчика Ci поступит число импульсов с формирователя ФИ, соответствующее, например, длине начального (первого) участка программы, на выходе ячейки совпадения появится сигнал «Конец участка, который через элемент «ИЛИ поступает в блок управления БУ и параллельно через элемент задержки 3 сигнала сбрасывает счетчик Ci в исходное состояние, подготавливая его для формирования длины следующего участка программы. Время задержки элементом 3 определяется длительностью переходного процесса при выполнении операций в блоке измерения скорости БИС. По сигналу «Конец участка блок управления БУ посылает в сумматор 2 команду, по которой вычисляется действительная скорость подъемной маши11Ы ПМ путем деления кода постоянного числа, содержащегося в блоке постоянных коэффициентов БПК и равного расстоянию между соседними импульсами формирователя ФИ с учетом масштаба скорости, на число, пропорциональное интервалу времени между этими импульсами, в двоичном счетчике блока измерения скорости БИС. Промежуточные результаты вычислений заносятся в блок регистров оперативной памяти БРОП, с которым сумматор S обменивается информацией по командам блока управления БУ. Код вычисленной де1 1Ствительиой скорости также хранится в блоке регистров оперативной памяти БРОП. После этого по команде блока управления БУ в сумматоре 2 вычисляется величина рассогласования между программной и действительной скоростями движения подъемной машины ПМ, причем код программной скорости формируется в блоке задания программы БЗП посредством наборного поля и триггерного регистра аналогично рассмотренному выше формированию кода напряжения задания и отличается от последнего на величину коэффициента форсировки. Величина кода рассогласования скоростей со своим знаком пересылается по команде блока управления БУ из блока регистров оперативной памяти БРОП в блок БПКА, где преобразуется в значение постоянного напряжения и алгебраически суммируется с напряжением задания, код которого поступает с блока задания программы БЗП, а затем суммарный сигнал через усилитель мощности УМ поступает на исполнительный двигатель ИД для отработки.
После этого блок управления БУ вновь посылает в счетчик числа участков Сд (фиг. 2) блока масштаба БМ счетный импульс, в результате чего в блоке задания программы БЗП формируется код напряжения задания и программной скорости на конец второго участка программы и т. д. Далее цикл работы устройства повторяется.
Работа блока управления БУ синхронизчруется серией тактовых илшульсов. вырабатываемых генератором тактовых импульсов ГТИ. Блок БКП работает следующим образом.
Предварительно на входе схем совпадсттня «И регистра Р (фиг. 4) посредством ламелей переключателя набирается двоичный код, соответствующий расстоянию от точки пачала движения до точки коррекшти прогп ммы. Пусть, нaпpи eD, это расстояние п двоичном коде равно «10101, тогда вхолы полвпй. третьей и пятой схем «И посредством ламелей переключателя соединяются с шиттой. на
которой присутствует «плюс наппяжспля источника питания ИП. Входы втопой. четвертой схем совпадения «И остаются пазомкнутыми. На вторых входах всех соединенных с тниной блока упоавлоттия БУ.
потенциал управления отсутствует, поэтомл и на выходе схем «И сигналы перебппгя т пт-геров разрядов счетчика Со также отсутствуют.
Как только подъемный СОГУ . v месту установки пУтевого датчика ПЛ fледний посылает сигнал на логтптегкл-ю гхрму блока управления БУ. в пезулылте на шине, соединенной со вторыми вхтами
схем совпадения «И регистра Р. появляется управляющий потенциал, соответствующими «плюсу напряжения питатшя. Таким образом, на обоих входах тех схем «ГЬ. У которых ламели переключателя зaмкн ты, в этот
момент времени присутствует «плюс наппяжения питания, т. е. суп ествует совпачепне сигналов. Указанные схемы «И открываются, и сигналы с их выходов поступают Tia в.ходы соответствуюн1их разрядов претваптттельно очищенного счетчика числя часткпв С2, переводя эти разряды в едичпчнор состояние. Следовательно, в точке коррекптти ппограммы вначале счетчик числа участков Сочищается по команде «Сброс, поступяюнтей
с блока управления БУ, от двоиччого кола. соответствуюнего расстоянию (числу участков программы), пройденномл пот емипй машиной, вместе с накопленной оишбкой. а затем в этот счетчик заносится двоттчный код.
соответствующий истииному положению по1ъемных сосудов, т. е. осуществляется коррекция программы по пути.
При подходе подъемного сосуда к месту останова у приемной площадки с выхода ячейки совпадения (фиг. 2) в блоке масштаба БМ на блок управления БУ поступает сигнал рабочего торможения, который через ячейку ЯТР включает исполнительный механизм рабочего тормоза. В случае аварийной ситуации (затяжной ПУСК, отсутствие импульсов с формирователя ФИ) реле времени РВ выдает сигнал в блок управления БУ, который через ячейку ЯТП включает предохранительный тормоз. 7 П р е д м с и 3 о б р с т с и м я 1. Цифровое устройство для автоматического управления движением илахтиой подъемной машины, содержащее датчик загрузки сосуда, датчик пути с формирователем импульсов, блок измерения скорости, генератор эталонной частоты, усилители мощности, блок преобразователей «Код-аналог, блок управления с генератором тактовых импульсов на входе, блок задания программы, блок коррекции программы, блок постоянных коэффициентов, блок регистров оперативной памяти, ячейки формирования сигналов рабочего и предохранительного торможения и источ-15 ники питания, отличающееся тем, что, с целью повышения точности регулирования скорости мащины н увеличения операционной надежности, оно снабжено путевым датчиком коррекции программы, подключенным к бло-20 ку управления, реле времени, соединенным входом с формирователем импульсов, а вы51ft ходом с блоком управления, блоком масщтаба длины участков программы скорости в функции пути, подсоединенным своими входами к формирователю импульсов, блоку управления и блоку коррекции программы, а выходами - к блоку задания программы и блоку управления, причем блок коррекции программы выполнен в виде схем совпадения, одни входы которых через переключатели подсоединены к шине источника питания, другие - к логической схеме блока управления, а выходы - ко входам блока масштаба. 2. Устройство по п. 1 отличающееся тем, что, с целью разделения масштаба длины участков регулирования и измерения скорости машины, блок масштаба выполнен в виде двух двоичных счетчиков и двух 1 аборов комбинационных схем совпадения и разделения, число которых соответственно пропорционально номеру границы переключения текущего участка программы и ее длине.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство формирования сигнала для коррекции искажений телевизионного изображения | 1985 |
|
SU1317687A2 |
| Устройство для определения содержания органических примесей в воде | 1990 |
|
SU1804624A3 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| Цифровой регулятор скорости вращения электрического привода | 1973 |
|
SU495649A1 |
| Устройство для ввода информации от аналоговых датчиков | 1985 |
|
SU1298734A1 |
| ТЕСТЕР УРОВНЯ ИННОВАЦИОННОГО ИНТЕЛЛЕКТА ЛИЧНОСТИ | 2013 |
|
RU2522992C1 |
| Устройство для отображения информации на экране телевизионного индикатора | 1984 |
|
SU1292029A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПРЕЦИЗИОННЫЙ ЧАСТОМЕР ПРОМЫШЛЕННОГО НАПРЯЖЕНИЯ | 2006 |
|
RU2333501C1 |
| Программное устройство для поддержания постоянства скорости резания | 1984 |
|
SU1211696A1 |

{(fft(
OTfiHn оФиг. i
I Л
L
Л
ТМ J
от БНП оТР
или
ИЛИ
т
гз-
П 21 .31
J
ИЛИ
нБЗП
J
1
фаг. 2
Сброс
КБУ
Управление
-опбК
ИЛИ I
ИЛИ
.-о
/W
п
-онВМ
