Мзобпетение относится к автомати- ijecKCJM;/ управлению и вычислительной тамилке и может быть использовано длк поддержания постоянства скорости резания при обработке на токарных станках с числовым программным управлением и других станках, оснащенных датчиками положения суппорта, например станках с цифровыми отсчетным устройствами.
Цель изобретения - расширение фунциональных возможностей устройства и повышение его точности.
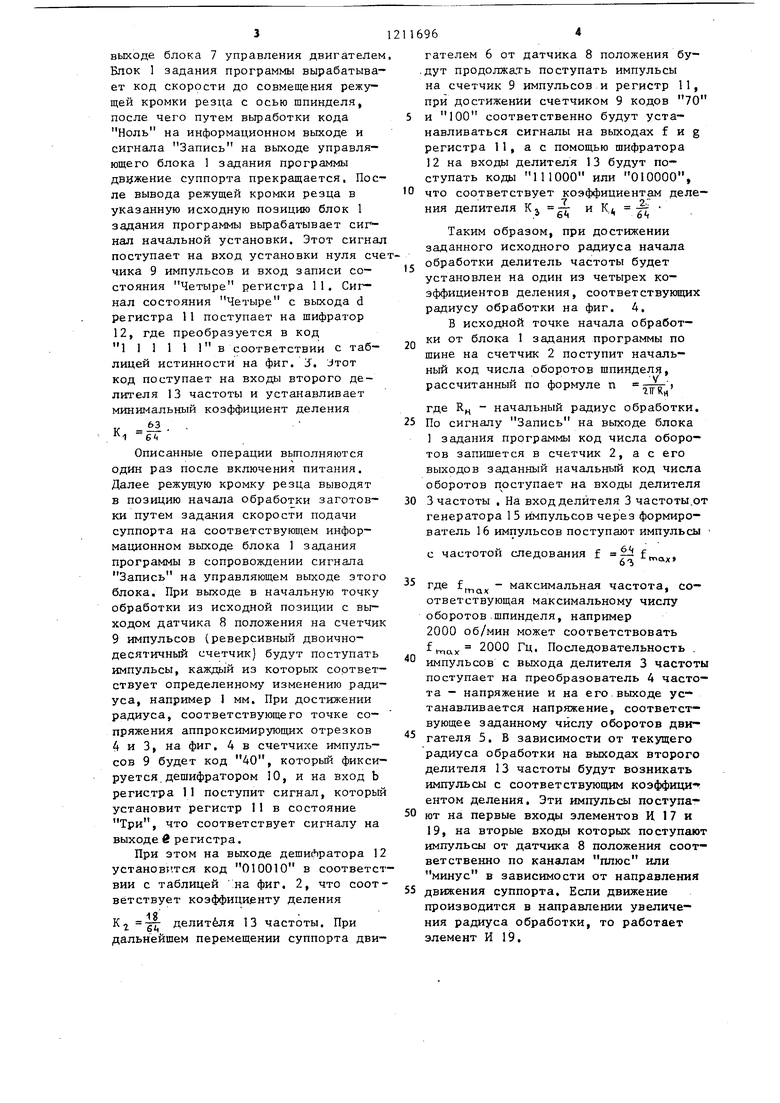
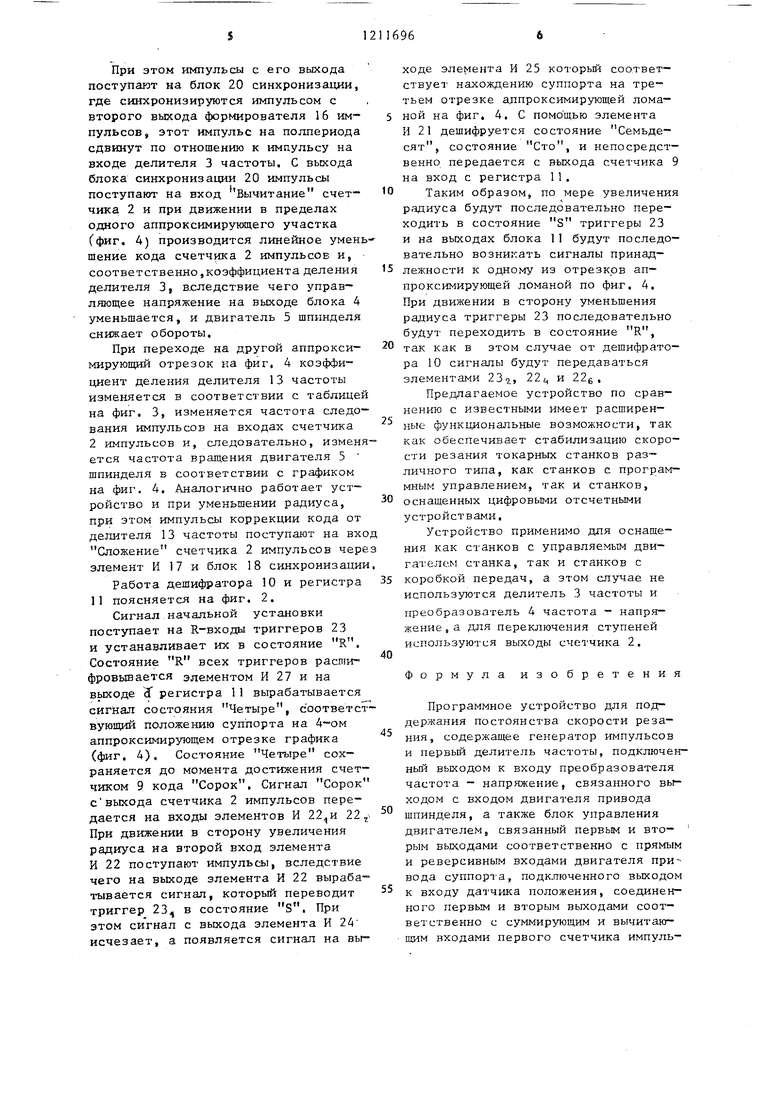
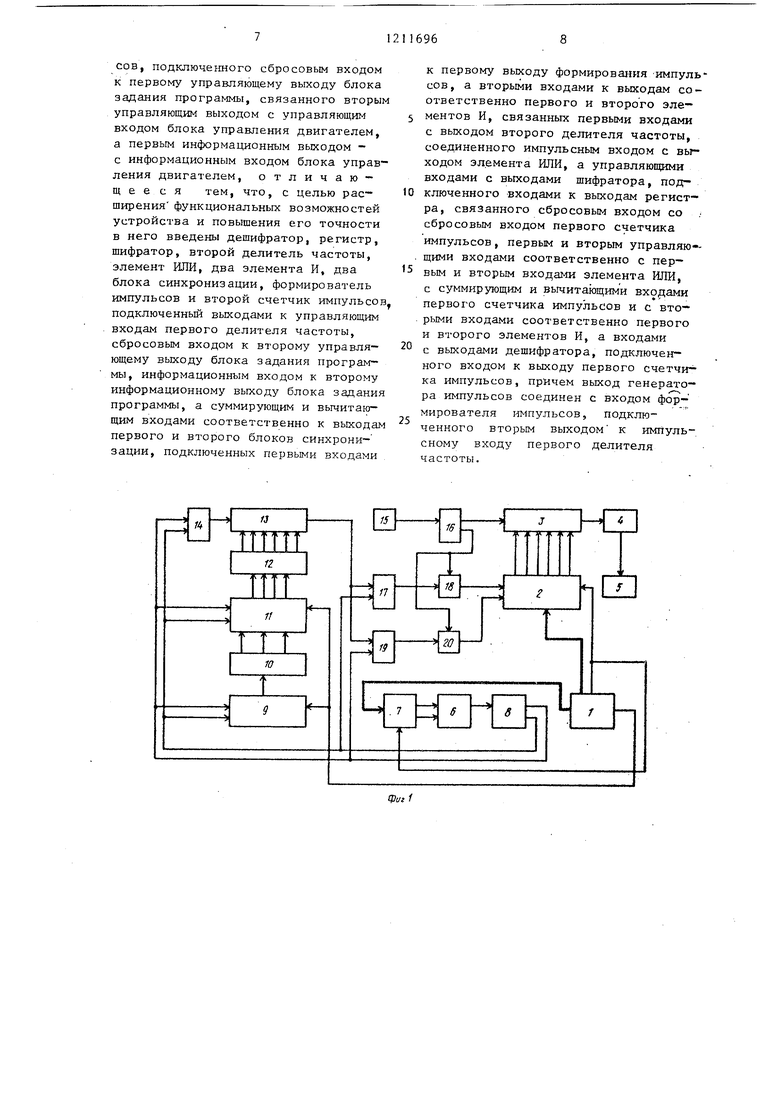
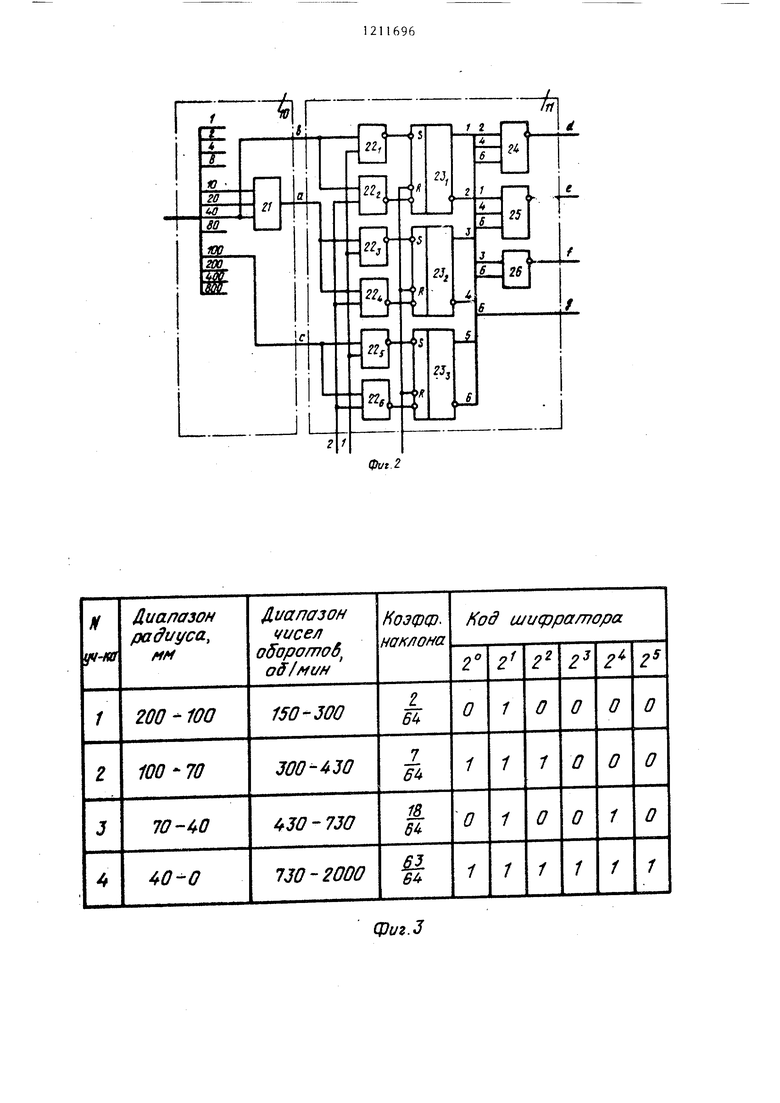
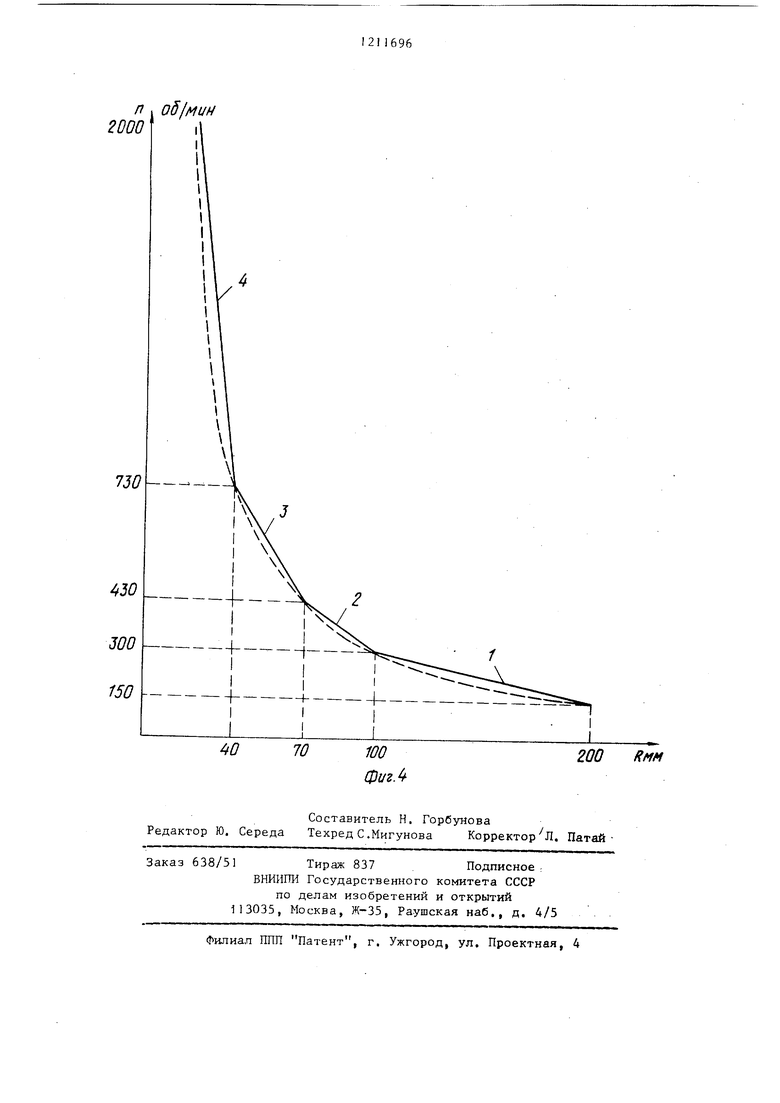
На фиг. 1 приведена функциональна схема предлагаемого устройства} на фигt 2 схема дешифратора (10) и регистра (11); на фиг, 3 - таблица истинности шифратора; на фиг. 4 - график аппроксимированной зависимости п f(R),
Устройство состоит из блока 1 задания программь, счетчика 2 импульсов, первого делителя 3 частоты, преобразователя 4 частота - напряжение, двигателя 5 привода шпинделя, двигателя 6 привода суппорта, блока
7управления двигателем, датчика 8 положения, первого счетчика 9, дешифратора 10, регистра П, шифрато™ ра 12, второго делителя 13 частоты, элемента ИЛИ 14, генератора 15 импульсов , формирователя 16 импульсов, первого элемента И 17, первого блока 18 синхронизации, второго элемента
И 19 и второго блока 20 синхронизации.
Дешифратор 10 (фиг, 2) состоит из второго элемента И 21 и проводников для связи выходов счетчика 9 импульсов с регистром II на четыре состояния, содержащим шесть третьих элементов И 22 на два входа, трех RS-триггеров 23, двух четвертьпс элементов И 24 и 25 на три входа и одного пятого элемента И 26 на два входас
Блок задания программы состоит из набора переключателей (не показано) разделенных на группы :: скорость суппорта 5 код оборотов, кнопка Пуск и кнопка Подготовка,
8качестве блока заданий программы может также использоваться система числового программного управления,напри™ мер, Н-22, и др.
Сущность работы устройства со стоит в замене вычислительной операции п п - обороты шпинделя в минуту; R - радиус обработки в мм; V - скорость резания в мм/мин,
2 ТТ . При этом указанная вычислительная операция заменяется операцией п , K|R, где К) - коэффициент наклона аппроксимирующих отрезков прямых, для поддержания постоянства
наклона аппроксимирующих отрезков прямых. Для поддержания постоянства контурной скорости на уровне 2% от заданной достаточно функцию п Кзаменить четырьмя отрезками прямой
63 .. 18
с коэффициентами К 7Т К 7Т К
Ь4 64 7- ,, г -. К, -- и точками сопряжения
6 If 1 6ч
R 100 мм, R , 70 мм, R., 40 мм.
Устройство работает следующим образом.
После включения питания блок 1 задания программы на информационных выходах вырабатывает коды Ноль. Эти
коды поступают на информационные ВХОДЕ, блока 7 управления двигателем, и сче1 Чика 2 импульсов. Затем блоком 1 задания программы вырабатывается сигнал Запись на выходе Два, который поступает на входы управления записью информации блока управления двигателем и счетчика 2. При этом нулевой код скорости суппорта преобразуется блоком 7 управления двигателем в нулевое напряжение, что обеспечивает останов двигателя 6 суппорта.
Нулевой код числа оборотов шпинделя поступает в счетчик 2 импульсов и на его выходах устанавливается потенциал логического нуля, код нуля
пос 1 упает на входы делителя 3 частоты, на выходе которого управляющая последовательность импульсов отсутствует .
Таким образом, на вход преобразо-
вателя 4 частота - напряжение информационные сигналь не поступают и двигатель 5 шпинделя остановлен. После останова двигателей 5 и 6 с помо- гаью блока 1 задания программы путем
задания кодов скорости суппорта на первом информационном выходе и сигналов записи на втором управляющем выходе приводят в дв1тжение двигатель 6 суппорта. Это происходит благодаря
тому, что в блок 7 управления двигателем записывается выбранный оператором код скорости, которьй преоб- разуея ся в управляющее напряжение на
3
выходе блока 7 управления двигателем Блок 1 задания программы вырабатывает код скорости до совмещения режущей кромки резца с осью шпинделя, после чего путем выработки кода Ноль на информационном выходе и сигнала Запись на выходе управляющего блока 1 задания программы движение суппорта прекращается, После вывода режущей кромки резца в указанную исходную позицию блок 1 задания программы вьфабатывает сигнал начальной установки. Этот сигнал поступает на вход установки нуля счечика 9 импульсов и вход записи состояния Четыре регистра 11. Сигнал состояния Четыре с выхода d регистра 11 поступает на щифратор 12, где преобразуется в код 11111 1 в соответствии с таблицей истинности на фиг. Л, JTOT код поступает на входы второго делителя 13 частоты и устанавливает минимальный коэффициент деления
к -±з . ,
Описанные операции выполняются один раз после включения питания. Далее режущую кромку резца выводят в позицию начала обработки заготовки путем задания скорости подачи суппорта на соответствующем информационном выходе блока 1 задания программы в сопровождении сигнала Запись на управляющем выходе этого блока. При выходе в начальную точку обработки из исходной позиции с выходом датчика 8 положения на счетчик 9 импульсов (реверсивный двоично- десятичный счетчик) будут поступать импульсы, каждый из которых соответствует определенному изменению радиуса, например 1 мм. При достижении радиуса, соответствующего точке сопряжения аппроксимирующих отрезков 4 и 3, на фиг. 4 в счетчике импульсов 9 будет код 40, который фиксируется, дешифратором 10, и на вход b регистра 11 поступит сигнал, который установит регистр 11 в состояние Три, что соответствует сигналу на выходе И регистра.
При этом на выходе дешифратора 12 установится код 010010 в соответствии с таблицей на фиг. 2, что соответствует коэффициенту деления
18
делителя 13 частоты. При
дальнейшем перемещении суппорта дви-
116964
гателем 6 от датчика 8 положения бу- .дут продолжать поступать импульсы на счетчик 9 импульсов и регистр 11, при достижении счетчиком 9 кодов 70
5 и 100 соответственно будут устанавливаться сигналы на выходах f и g регистра 11, а с помощью шифратора 12 на входы делителя 13 будут поступать коды 111000 или 010000,
10 что соответствует коэффициентам деления делителя Kj гг и К,(,
Таким образом, при достижении заданного исходного радиуса начала
обработки делитель частоты будет установлен на один из четырех коэффициентов деления, соответствующих радиусу обработки на фиг. 4.
В исходной точке начала обработки от блока 1 задания программы по шине на счетчик 2 поступит начальный код числа оборотов шпинделя,
рассчитанный по формуле п ;г
ли Krt
где RH - начальный радиус обработки.
По сигналу Запись на выходе блока 1 задания программы код числа оборотов запишется в счетчик 2, а с его выходов заданный начальный код числа оборотов проступает на входы делителя
3 частоты . На вход делителя 3 частоты.от генератора 1 5 импульсов через формирователь 16 импульсов поступают импульсы
с частотой следования f f
бг
-max
где - максимальная частота, соответствующая максимальному числу оборотов шпинделя, например 2000 об/мин может соответствовать 2000 Гц. Последовательность , импульсов с выхода делителя 3 частоты поступает на преобразователь 4 частота - напряжение и на его выходе устанавливается напряжение, соответствующее заданному числу оборотов дви- гателя 5, В зависимости от текущего радиуса обработки на выходах второго делителя 13 частоты будут возникать импульсы с соответствующим коэффицит ентом деления. Эти импульсы поступают на первые входы элементов И. 17 и 19, на вторые входы которых поступают импульсы от датчика 8 положения соответственно по каналам плюс или минус в зависимости от направления движения суппорта. Если движение производится в направлении увеличения радиуса обработки, то работает элемент И 19,
При этом импульсы с его выхода поступают на блок 20 синхронизации, где синхронизируются импульсом с второго выхода формирователя 16 им- пульсов, этот импульс на полпериода сдвинут по отношению к импульсу на входе делителя 3 частоты, С выхода блока синхронизации 20 импульсы поступают на вход Вычитание счет- чика 2 и при движении в пределах одного аппроксимирующего участка Сфиг. А) производится линейное умень шение кода счетчика 2 импульсов и, соответственно,коэффициента деления делителя 3, вх:ледствие чего управляющее напряжение на выходе блока 4 уменьшается, и двигатель 5 шпинделя снижает обороты.
При переходе на другой аппрокси- нирующий отрезок на фиг, 4 коэффициент деления делителя 13 частоты изменяется в соответствии с таблицей на фиг, 3, изменяется частота следования импульсов на входах счетчика 2 импульсов и, следовательно, изменя ется частота вращения двигателя 5 шпинделя в соответствии с графиком на фиг, 4, Аналогично работает устройство и при уменьшении радиуса, при этом импульсы коррекции кода от делителя 13 частоты поступают на вхо Сложение счетчика 2 импульсов чере элемент И 17 и блок 18 синхронизации
Работа дешифратора 10 и регистра 11 поясняется на фиг, 2,
Сигнал.начальной установки поступает на R-входы триггеров 23 и устанавливает их в состояние R, Состояние R всех триггеров расти- фровьшается элементом И 27 н на выходе ЗГ регистра 11 вырабатывается сигнал состояния Четыре, Соответствующий положению суппорта на 4-ом аппроксимирующем отрезке графика (фиг, 4), Состояние Четыре сохраняется до момента достижения счетчиком 9 кода Сорок, Сигнал Сорок с выхода счетчика 2 импульсов передается на входы элементов И 22 При движении в сторону увеличения радиуса на второй вход элемента И 22 поступают импульсы, вследствие чего на выходе элемента И 22 вырабатывается сигнал, который переводит триггер 23, в состояние S, При этом сигнал с выхода элемента И 24 исчезает, а появляется сигнал на вы
s 0 15
5
0
5
ходе элемента И 25 который соответствует нахождению суппорта на третьем отрезке адпроксимирующей ломаной на фиг, 4, С помо щью элемента И 21 дешифруется состояние Семьдесят, состояние Сто, и непосредственно передается с выхода счетчика 9 на вход с регистра 1 1 ,
Таким образом, по мере увеличения радиуса будут последовательно переходить в состояние S триггеры 23 и на выходах блока 11 будут последовательно возникать сигналы принадлежности к одному из отрезков аппроксимирующей ломаной по фиг, 4, При движении в сторону уменьшения радиуса триггеры 23 последовательно будут переходить в состояние R, так как в этом случае от дешифратора 10 сигналы будут передаваться элементами 23, 22г и 22б ,
Предлагаемое устройство по сравнению с известными имеет расширенные функциональные возможности, так как обеспечивает стабилизацию скорости резания токарных станков различного типа, как станков с программным управлением, так и станков, оснащенных цифровыми отсчетными устройствами.
Устройство применимо для оснащения как станков с управляемым дви- га1:елем станка, так и станков с коробкой передач, а этом случае не используются делитель 3 частоты и преобразователь 4 частота - напряжение ,а для переключения ступеней используются вьЕХОды счетчика 2,
Формула изобретения
Программное устройство для поддержания постоянства скорости резания, содержащее генератор импульсов и первьй делитель частоты, подключенный выходом к входу преобразователя частота - напряжение, связанного выходом с входом двигателя привода шпинделя, а также блок управления двигателем, связанный первым и вто- рым вых,одами соответственно с прямым и реверсивным входами двигателя привода суппорта, подключенного выходом к входу датчика положения, соединенного первым и вторым выходами соответственно с суммирующим и вычитающим входами первого счетчика импульсов, подключенного сбросовым входом к первому управляющему выходу блока задания программы, связанного вторым управляющим выходом с управляющим входом блока управления двигателем, а первым информационным выходом - с информационным входом блока управления двигателем, отличаю™ щ е е с я тем, что, с целью рас ширения функциональных возможностей устройства и повышения его точности в него введены дешифратор, регистр, шифратор, второй делитель частоты, элемент ИЛИ, два элемента И, два блока синхронизации, формирователь импульсов и второй счетчик импульсов подключенный выходами к управляющим входам первого делителя частоты, сбросовым входом к второму управляющему выходу блока задания программы, информационным входом к второму информационному выходу блока задания программы, а суммирующим и вычитающим входами соответственно к выходам первого и второго блоков синхронизации, подключенных первыми входами
0
5
0
к первому выходу формирования импуль сов, а вторыми входами к выходам соответственно первого и второго эле ментов И, связанных первыми входами с выходом второго делителя частоты, соединенного импульсным входом с выходом элемента ИЛИ, а управляющими входами с выходами шифратора, ключенного входами к выходам регистра, связанного сбросовым входом со сбросовым входом первого счетчика импульсов, первым и вторым управляю-- щими входами соответственно с первым и вторым входами элемента ИЛИ, с суммирующим и вычитающими входами первого счетчика импульсов и с вторыми входами соответственно первого и второго элементов И, а входами с выходами дешифратора, подключенного входом к выходу первого счетчика импульсов, причем выход генератора импульсов соединен с входом фор- мирователя импульсов, подключенного вторым выходом к импульсному входу первого делителя частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство стабилизации скорости резания для токарно-винтовых станков с числовым программным управлением | 1983 |
|
SU1180845A1 |
| Устройство для программного управления шпинделем | 1987 |
|
SU1511735A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Устройство для управления станком | 1981 |
|
SU970322A1 |
| Устройство стабилизации скорости резания для токарных станков с ЧПУ | 1983 |
|
SU1136112A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
| Устройство для контроля систем программного управления станком | 1988 |
|
SU1580320A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
Изобретение относится к области автоматического управления и вычислительной технике и может быть использовано для поддержания постоянства скорости резания при обработке на токарных станках с числовым про граммным управлением и других станках. Оснащенных датчиками положения суппорта, например станках с цифровыми отсчетными устройствацк. Цель изобретения - расширение функциональных возможностей и повьшение точности. Устройство содержит блок задания программы, счетчик импульсов, пер- вьй делитель частоты преобразователь частота - напряжение, двигатель привода шпинделя, двигатель привода , суппорта, блок управления двигателем привода суппорта, датчик положения, первьй счетчик, дешифратор, perHCTpj шифратор, второй делитель частоты, элемент ИЛИ, генератор импульсов, формирователь импульсов, первый элемент И, первьй блок синхрониза ции, второй элемент И, второй блок синхронизации. Введение дешифратора, регистра, шифратора, второго делителя частоты, элемента ИЛИ, двух эле-, ментов И, двух блоков синхронизации, формирователя импульсов и второго счетчика импульсов обеспечивает стабилизацию скорости резания токарных станков различного типа, 4 ил. i (Л § to Од со о
Фиг.З
п о51мин
2000
I
200 RMM
Составитель Н, Горбунова
Редактор Ю. Середа Техред С.Мигунова
638/51 Тираж 837Подписное :
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
Корректор Л. Патай
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
