1
Изобретение относится к области весоизмерительной техники.
Известны весовые порционные дозаторы, содержащие два весовых бункера с силоизмерительными датчиками, блок управления с аналого-цифровым преобразователем, вычислитель и узел управления наполнением и опорожнением весовых бункеров. Эти дозаторы не обеспечивают требуемую точность и быстродействие.
В предлагаемом дозаторе весовые бункеры выполнены различной грузоподъемности с соотношением в пределах от 1 : 5 до 1 : 20, а блок управления снабжен коммутатором, входы которого подключены к силоизмерительным датчикам и -вычислителю, а выходы соединены с нуль-органом аналого-цифрового преобразователя и узлом управления наполнением и опорожнением весовых бункеров.
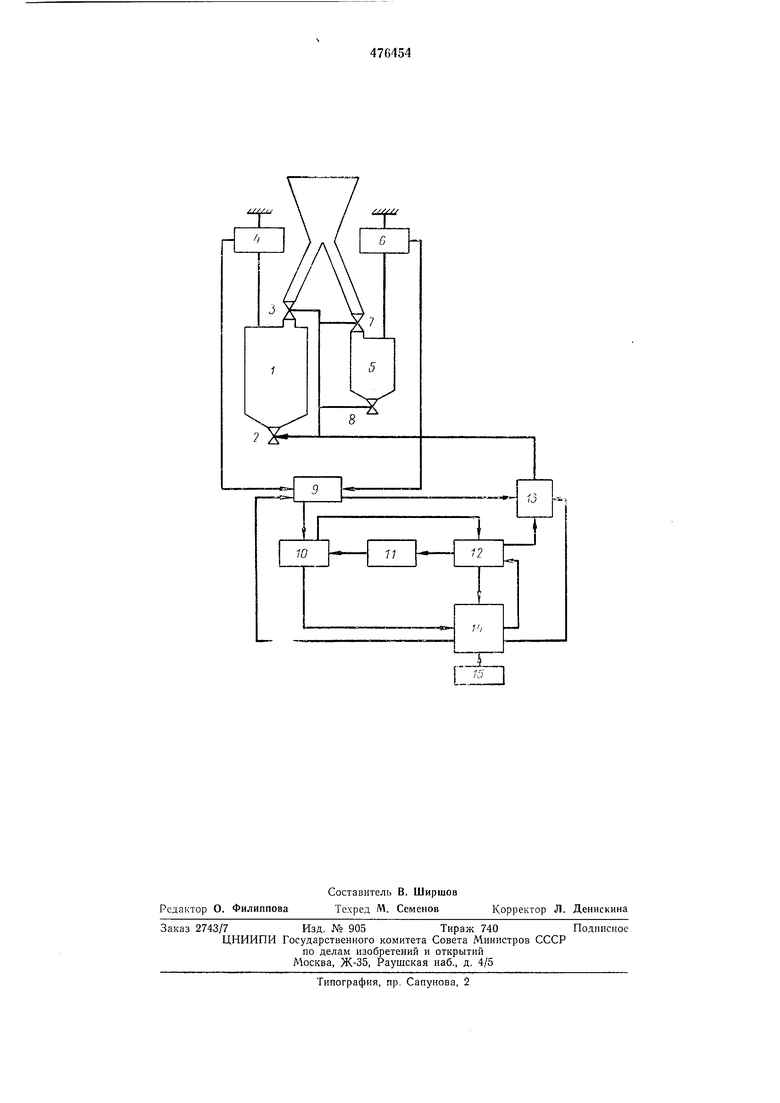
На чертеже показана функциональная схема дозатора.
Дозатор содержит весовой бункер 1 с клапа«ом опорожнения 2, клапаном наполнения 3 и силоизмерительным датчиком 4, бункер 5 с силоизмерительным датчиком 6, клапаном наполнения 7 и клапаном опорожнения 8.
Коммутатор 9 и аналого-цифровой преобразователь, образованный нуль-органом 10, делителем напряжения 11 и счетчиком 12, входит в состав блока управления. Бункеры 1 и
5 выполнены различной грузоподъемности з пределах соотношения 1 : 5 до 1 :20. Кроме того, дозатор содержит узел управления 13, вычислитель 14 и задатчик 15.
Дозатор работает следующим образом.
По команде на начало дозирования в вычислитель 14 из задатчика 15 вводится код, пропорциональный заданной массе дозы. Коммутатор 9 по команде вычислителя 14 подключает датчик 4 к нуль-органу 10. После этого узел управления 13 подает команду на открытие клапана наполнения 3 бункера 1. Вес материала .в бун-кере 1 отслеживается аналого-цифровым преобразователем и при наборе, например, 90% от массы дозы счетчик 12 через узел 13 подает команду на закрытие клапана 3. После выдержки времени производится многократный, например 100-кратный, перенос кода счетчика 12 в вычислитель
14 со знаком «-. В результате в вычислителе 14 оказывается записанной разность между заданной дозой и массой в бункере 1. По окончании переноса узел 13 по команде вычислителя 14 открывает клапан опорожнении
2 бункера 1. После опорожнения бункера 1 узел 13 закрывает клапан 2. Затем производится перенос кода счетчика 12 в вычислитель 14 столько же раз, сколько и при наполнении бункера 1, но теперь со знаком «-f. По окончании переноса в вычислителе 14 остается
число, соответствующее разности между заданной дозой и сдозированным из бувкера 1 количеством материала.
По команде вычислителя 14 коммутатор 9 подключает к нуль-органу 10 вместо датчика
4датчик 6. Аналогично наиолняется бункер 5 с той разницей, что количество загружаемого в него материала определяется числом, оставшимся в вычислителе 14.
Когда это количество материала загружено в бункер 5, счетчик 12, управляемый вычислителем 14, формирует команду узлу 13 на закрытие клапана наполнения 7. Затем бункер 5 опорожняется. При этом из хранящегося в вычислителе 14 -числа, соответствующего количеству материала, которое должно быть сдозировано из бункера 5, вычитается количество фактически сдозированного материала из этого бункера. Когда до конца дозирования остается заданная величина, определяемая опытным путем и зависящая от скорости истечения материала и инерционности клапана 8, узел 13 по команде вычислителя 14 формирует команду на закрытие клапана 8. Цикл дозирования на этом заканчивается.
Таким образом, дозатор производит наполнение и Опорожнение бункера 1 (большого) с любой скоростью, так как точность дозирования не зависит от динамики этих процессов. Этим повышается быстродействие.
Точность дозирования повышена за счет осреднения результатов взвешивания основной части дозы, а также за счет взвешивания меньшей части дозы на датчике с меньшим пределом измерения, т. е. более точном.
При этом выбор соотношения грузоподъемности бункера 1 к грузоподъемности бункера
5в соотношении от 1 : 5 до 1 : 20 является оптимальным по следующим причинам.
При наполнении и опорожнении большого бункера дозатора с высокой скоростью трудно обеспечить (учитывая динамику потока материала и налипание его на стенки бункера) выдачу из него материала с погрешностью меньшей 5%; тогда масса материала, сдозированного в первом цикле, составляет 95- 100% заданной дозы. Поэтому отношение грузоподъемностей бункеров меньшее 1 : 20 нецелесообразно, так как возможен пересып материала и соответствующая погрешность дозирования.
Верхний предел отношения грузоподъемностей бункеров больший, чем 1 : 5, также нецелесообразен. Действительно, средства взвешивания и быстродействие современных устройств наполнения бункеров во всех случаях, представляющих практический интерес, обеспечат выдачу в первом цикле дозирования массы материала в пределах 80-100% от заданной дозы. Следовательно, отношение грузоподъемности бункеров большее 1 : 5 приводит лишь к .неоправданному увеличению погрешности и времени дозирования.
Предмет изобретения
1.Весовой порционный дозатор, содержащий два весовых бункера с силоизмерительными датчиками, блок управления с аналогоцифровым преобразователем, вычислитель и узел управления наполнением и опорожнением весовых бункеров, отличающийся тем, что, с целью повышения точности и быстродействия, в нем весовые бункеры выполнены различной грузоподъемностью с соотношением в пределах от 1 :5 до 1 :20.
2.Дозатор по п. 1, отличающийся тем, что в нем блок управления снабжен коммутатором, входы которого подключены к силоизмерительным датчикам и вычислителю, а выходы соединены с нуль-органом аналогоцифрового преобразователя и узлом управления наполнением и опорожнением весовых бункеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКБ ЦМА | 1973 |
|
SU387223A1 |
| Цифровое устройство управления весовым порционным дозатором | 1980 |
|
SU892226A1 |
| Способ весового дискретного дозирования трудносыпучих материалов | 1981 |
|
SU1084621A1 |
| Способ весового дискретного дозирования сыпучих материалов | 1989 |
|
SU1642256A1 |
| Устройство для цифрового управления весовым порционным дозатором | 1977 |
|
SU637725A1 |
| Способ весового дозирования и устройство для его осуществления | 1987 |
|
SU1629759A1 |
| Весовой дозатор непрерывного действия | 1986 |
|
SU1418576A1 |
| Устройство для контроля и управления дозированием компонентов смеси | 1977 |
|
SU667820A2 |
| Весовой дозатор-расходомер | 1981 |
|
SU1055970A1 |
| КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1972 |
|
SU328344A1 |