1
Известны способы определения электромеханической постоянной времени двигателя постоянного тока, наиболее распространенными из которых являются графический или осциллографический способ измерения по имеющейся кривой скорости вращения вала при разгоне и расчетный способ нахождения электромеханической постоянной времени двигателя по имеющимся характеристикам собственно двигателя и находян;ейся на его валу нагрузки. Однако такие способы сложны и недостаточно точны.
Предлагаемый способ позволяет упростить процесс определения электромеханической постоянной времени двигателя. Это достигается тем, что последовательно с якорем двигателя и источником входного сигнала напряжения поочередно подключают два дополнительных резистора, величина сопротивления одного из которых вдвое больше другого, осциллографируют приращения падений нанряжения на иих при скачкообразном приращении входного сигнала, по осциллограммам определяют иптервалы времени, прошедщие с моментов появления приращений входных сигналов напряжения до моментов достижения приращениями выходных сигналов падения напряжения значения 0,37 их амплитудных величин относительно установивщихся уровией, а величину электромеханической ностоянной времени
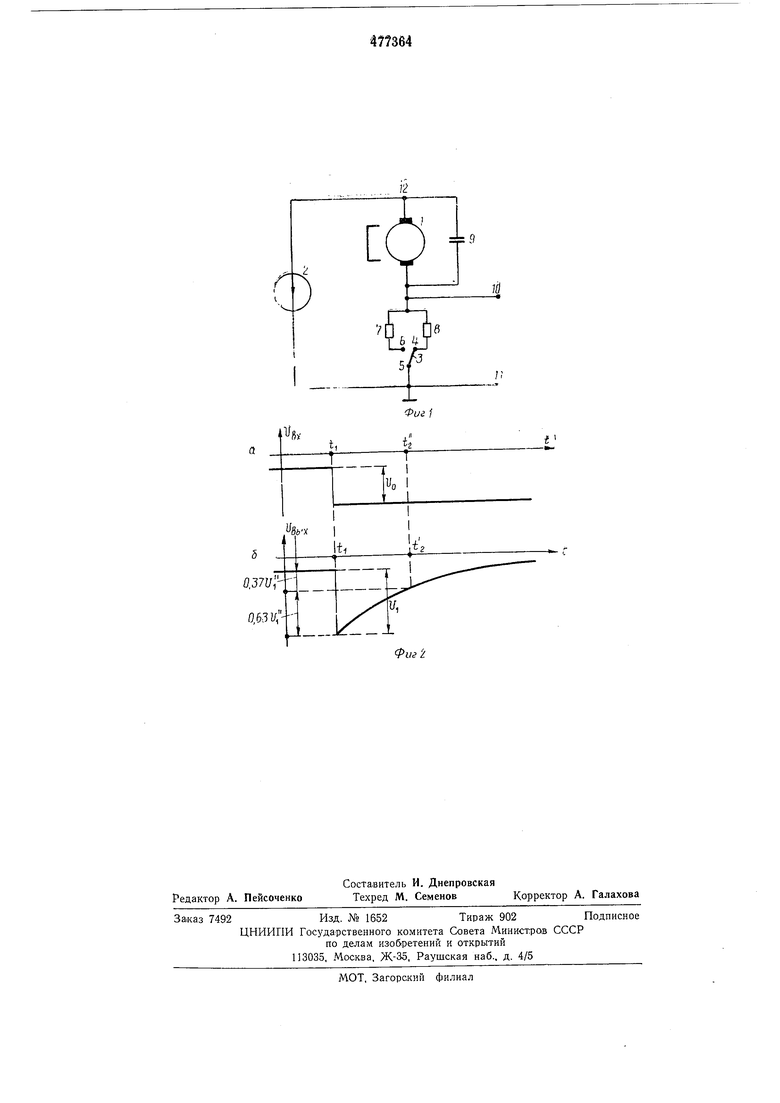
двигателя определяют по разпости между удвоенным найденным интервалом времени, соответствующим меньщему дополнительному резистору, и интервалом времени, опрзделенным для большего дополнительного резистора. На фиг. 1 дана принципиальная электрическая схема устройства для осуществлепия описываемого способа; па фиг. 2-диаграммы: а - входного наиряж&ния источника устройства, б - .выходного наиряжения устройства. В устройство (см. фиг. 1) входят испытуемый двигатель 1, источник 2 входного напряжения УИХ , ключ 3, ноочередпо замыкающий клеммы 4 и 5 или 6 и 5 схемы, дополнительяые резисторы 7 и 8 (R, и R, ) и фильтрующий конденсатор 9, иредошзначанный для снижения уровня коллекторных пульсаций в выходнОМ сигнале устройства. Выходной сигнал, снимаемый с |Клемм 10 и 11, несет .информацию о величине электромехаиической ностояиной В:реме1ни исследуемого двигателя. Двигатель люжет быть представлен схемой замещения, состоящей из последовательно соединенных источника э. д. с. якоря е и омического сопротивления якоря .
В отсутствие фильтрующего «опденсатора 9 электромеханическую постоянную времени двигателя определяют с.тедующпм образом. Пусть ключ 3 соединяет клеммы 4 и 5 схемы. Тогда, если в момент времени ti (см. фиг. 2, а) еходяое напряже1ние f/вх источника 2 лолучает скачкообразное приращение f/o, то по мере разгона двигателя приращение выходного -напряжения, определяемое ло отношению к начальному значению и они/маемое с клемм 10 и II схемы, изменяется по закону i-fi At/Bb,x(0 ; г.. ( + «). 1о (;-/,), , начальный выброс прираще«ия выходного напряжения (см. фиг. 2, б); - коэффициент прапорциональнасти;Г„ - электромеханическая постоянная .времени двигателя; 1о(/-/i) - единичный скачкообразный сигнал. В момент времени (t;)Ul.e 7-„(1 + а-) ц « 0,37 у;. Таким образом, задавшись величиной (2) 0.37 1 , ло осциллограмме At/вых (О можно найти момент времени t.2 , а затем определить величину электромеханической постоянной времени двигателя, воспользовавшись соотношением Г. -,А-().(1) При осциллог.рафическом определепии момента времени t. более удобно отмерять контрольный уровень для At/вых (О ие от начального значения (Oi 2 От вершины экопоненциального импульса. При этом величина контрольного уровня равна 0,63 U (см. фиг. 2, б). Если .переставить ключ 3 в положение, соответствующее замыкапию клем.М 6 и 5 схемы с тем, чтобы резистор 7 оказался последовател-ьно включенным с якорем двигателя, и повторить эксперимент ло изложениой методике, то электромеханическую постоянную времени двигателя можно определить по формуле7-)-/1 Я м - , --- (/ - /,). (2) .+R, Исключая из выражений (1) и (2) величину я получают (t.2- it) - R (t-. - f,) -г 0 Rn - Rn Из расчетной формулы (S) следует, что ри 1использавании измерительного усгройСта для определения электромеханической постоянной времени двигателя по схеме «а фиг. 1 величину Г находят, не измеряя омичеокого сопротивления якоря и общего момента инерции подвижных частей привода, приведенных к валу двигателя. Если выполнить условие , то формула для нахождения Г„ принимает вид Г„ 2 (t;-ti) -(t,-ti),(4) т. е. шеличИНа электромеханической постоянной времени двигателя определяется разностью между удвоенным интервалом времени, прошедшим с момента появления приращения входного сигнала до момента достижения приращением выходного сигнала значения 0,37 его ам1нлитудной величины относительно установившегося уровня, соответствующим меньшему дополнительному резистору, включенному ио-следовательно с якорем двигателя, и аналогичным интервалом времени, определенным для большего дополнительного резистора. Проведанный эконеримент показал, что измерять величины интервалов (/, j) и (/г, i) времени очень трудно вследствие наличия значительных шумов, /возникающих при коммутации коллекторных пластин двигателя. Включив между клеммами 10 и 12 схемы фильтрующую емкость 9 (см. фиг. 1), удается понизить уровень шума. Например, для двигателя типа ДПМ-25-Н1-01 при сопротивлениях 400м и R 20 Ом величина фильтрующей емкости 9 может быть равна 200 мкФ. Погрешность измерения при этом меньше ± 10%. Предмет изобретения Способ определения элвктромеха-нической постоянной времени двигателя постоянного тока, отличающийся тем, что, с целью упрощения, последовательно с якорем двигателя и источником входного сигнала напряжения поочередно подключают два дополнительных резистора, величина сопротивления одного из которых вдвое больше другого, осциллографируют приращения падений напряжения на них при скачкообразном приращении входного сигнала, по осциллограммам определяют интервалы времени, прошедшие с моментов появления приращений входных сигналов напряжения до моментов достижения лриращениями выходных сигналов падения напряжения значения 0,37 их амплитудных величин относительно установившихся уровней, а величину электромеханической постоянной времени двигателя 01пределяют по разности между удвоенным найденным интервалом времени, соответствующим меньшему дополнительному резистору, и интервалом времени, определенным для большего дополнительного резистора.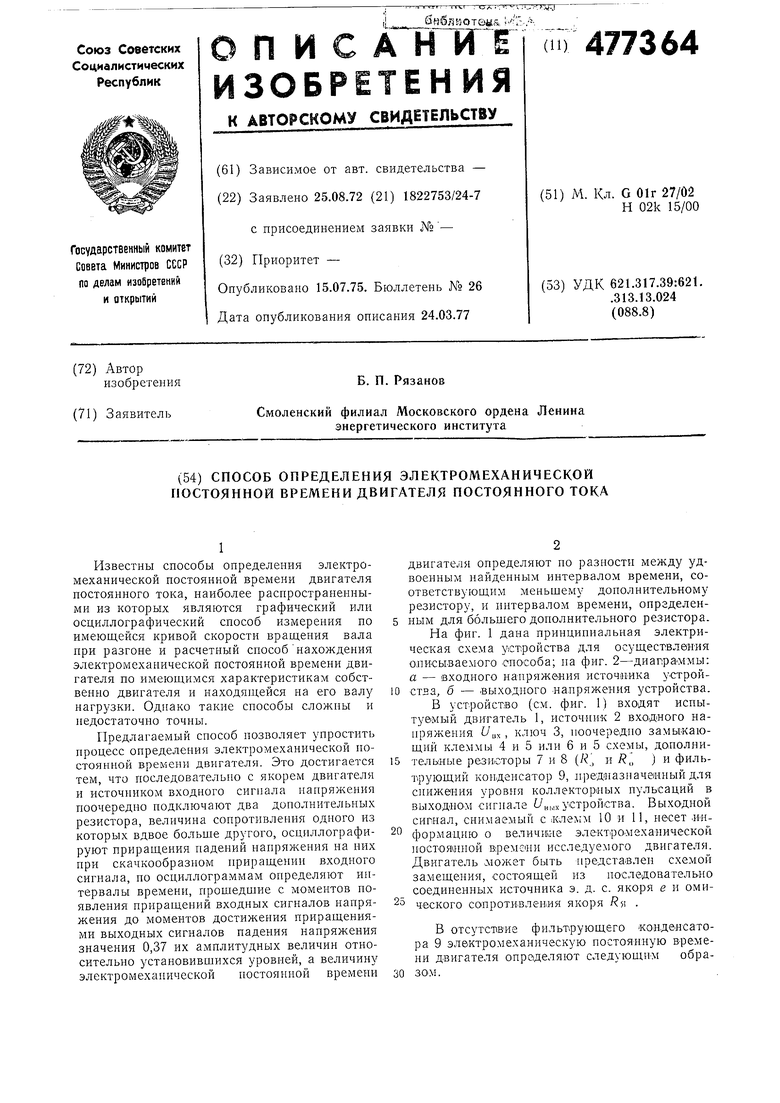
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕРЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1989 |
|
RU2020714C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНТЕРВАЛА ВРЕМЕНИ В ПОСТОЯННОЕ НАПРЯЖЕНИЕ | 1990 |
|
RU2007028C1 |
| Датчик ЭДС двигателя постоянного тока | 1985 |
|
SU1307356A1 |
| Устройство для стабилизации скорости микроэлектродвигателя | 1971 |
|
SU738078A1 |
| Электропривод постоянного тока | 1980 |
|
SU944036A1 |
| Способ определения электромагнитнной постоянной времени якорной цепи электродвигателя постоянного тока | 1975 |
|
SU608232A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧИСЛА ОБОРОТОВ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМ МАГНИТОМ (ВАРИАНТЫ) | 1990 |
|
RU2027213C1 |
| Пускатель для электродвигателя постоянного тока | 1986 |
|
SU1555790A1 |
| Стабилизатор напряжения постоянного тока | 1977 |
|
SU691817A1 |
| Электропривод постоянного тока | 1984 |
|
SU1210195A1 |