ел
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерциальный волнограф | 1988 |
|
SU1696865A1 |
| Волнограф | 1987 |
|
SU1613861A1 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| Устройство для стабилизации на заданной глубине опущенных на тросе объектов | 1975 |
|
SU537889A2 |
| Измеритель углов ориентации подвижного объекта | 1991 |
|
SU1793228A1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ КИНООПЕРАТОРА | 1991 |
|
RU2032200C1 |
Применение: изобретение относится к измерительной технике и позволяет повысить точность регистрации профиля волнения на водной поверхности при метеорологических и океанографических исследований. Сущность изобретения: на катушках дистанционного отклонения акселерометров формируют гармонический сигнал определенной частоты и амплитуды, который накладывают на информативные сигналы датчиков. Формирование выходного сигнала по измеряемому параметру включает выделение и компенсацию из информативного сигнала акселерометров сигналов по углу наклона этих датчиков относительно вертикали и составляющей от ускорения свободного падения. 4 ил.
Изобретение относится к измерительной технике, в частности, для измерения параметров ветровой волны и может быть использовано, например, при метеорологических и океанографических исследованиях. .. . ;.Целью изобретения является повышение точности измерения.
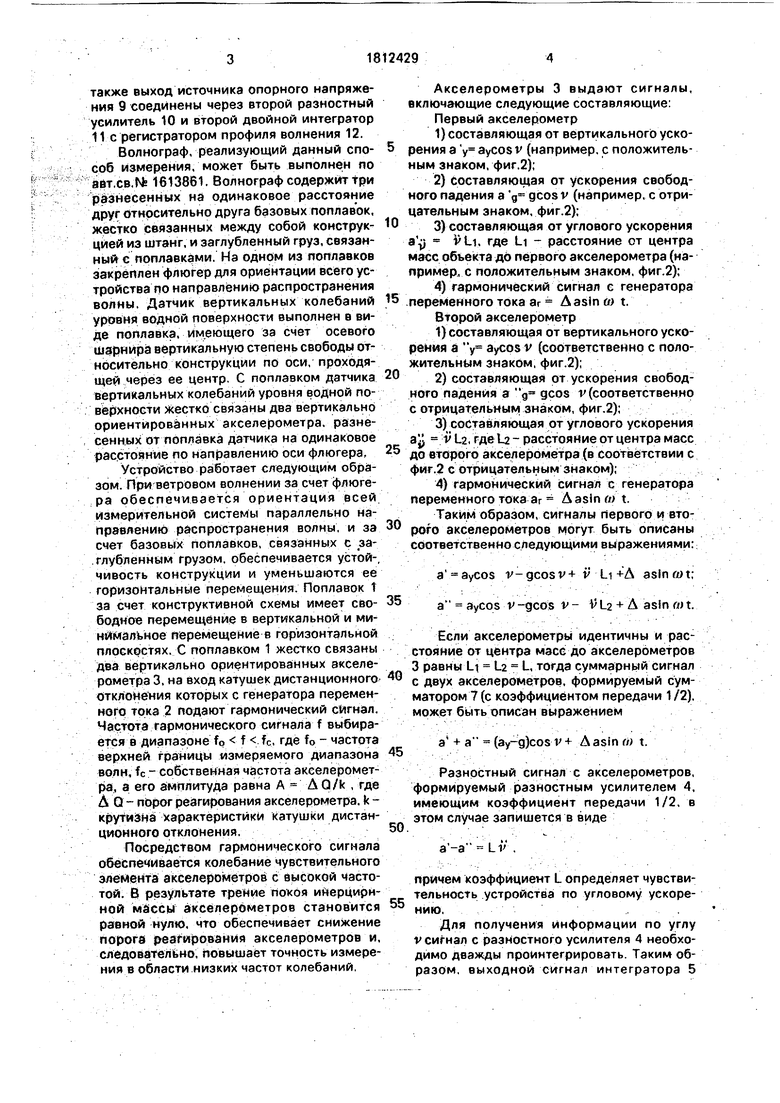
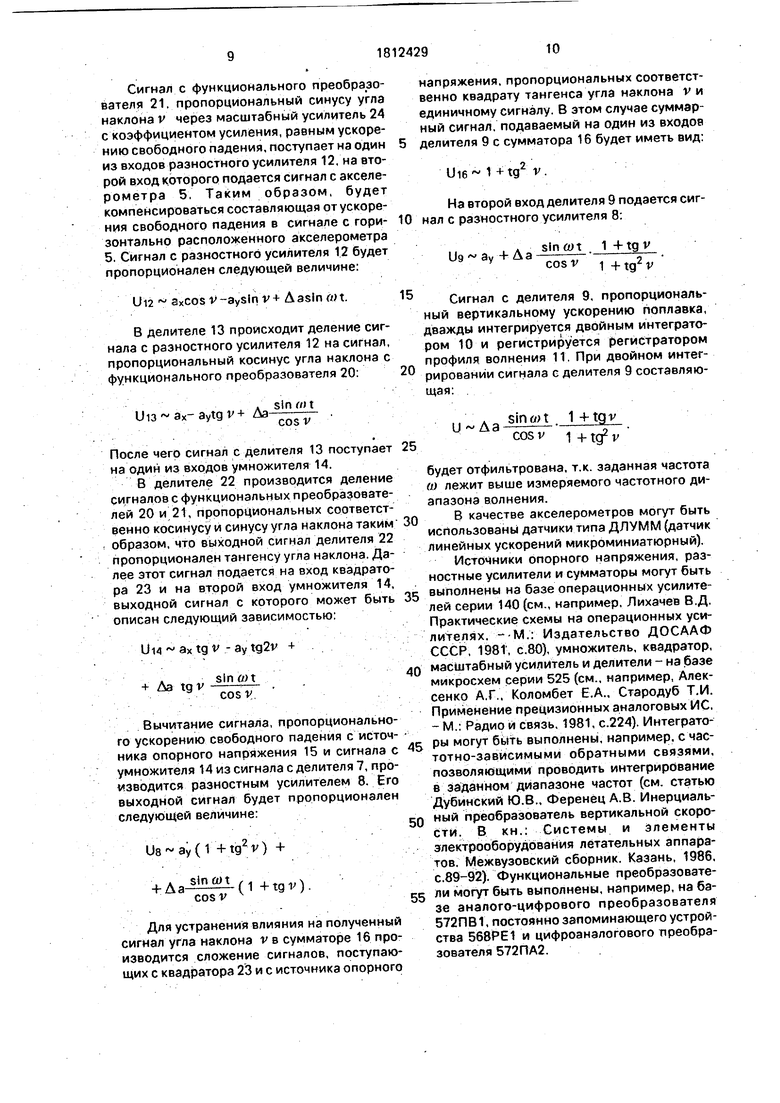
На фиг. 1 изображена структурная схема обработки информативных сигналов, где 1 - поплавок датчика вертикальных колебаний уровня водной поверхности, 2 - генератор переменного тока, 3 - акселерометры (КДО - катушка дистанционного отклонения, ДС - датчик сигнала), 4,10 - разностные усилители: 5,11 - двойные интеграторы, 6 - функциональный преобразователь, 7 - сумматор, 8 - делящее устройство. 9 - источник опорногб. напряжения, 12 - регистратор.
Поплавок 1 датчика вертикальных колебаний уровня водной поверхности жестко связан с акселерометрами 3. Выход генератора переменного тока 2 связан со входом катушек дистанционного отклонения акселерометров 3. Выходы акселерометров 3 связаны со входами первого разностного усилителя 4 и сумматора 7. Выход первого разностного усилителя 4 через первый двойной интегратор 5 и функциональный преобразователь б, а выход сумматора 7 непосредственно связаны с делящим устройством 8. Выход делящего устройства 8, а
со го
Јь N) О
также выход источника опорного напряжения 9 соединены через второй разностный усилитель 10 и второй двойной интегратор 11 с регистратором профиля волнения 12.
Волнограф, реализующий данный способ измерения, может быть выполнен по автсв.Мг 1613861. Волнограф содержит три Р&знесенных на одинаковое расстояние друг относительно друга базовых поплавок, жестко связанных между собой конструкцией из штанг, и заглубленный груз, связанный с поплавками. На одном из поплавков закреплен флюгер для ориентации всего устройства по направлению распространения волны. Датчик вертикальных колебаний уровня водной поверхности выполнен в виде поплавка, имеющего за счет осевого шарнира вертикальную степень свободы относительно конструкции по оси, проходящей через ее центр. С поплавком датчика вертикальных колебаний уровня водной поверхности жестко связаны два вертикально ориентированных акселерометра, разнесенных от поплавка датчика на одинаковое расстояние по направлению оси флюгера,
Устройство работает следующим образом. При ветровом волнении за счет флюгера обеспечивается ориентация всей измерительной системы параллельно направлению распространения волны, и за счет базовых поплавков, связанных с за- .глубленным грузом, обеспечивается устой-, чивость конструкции и уменьшаются ее горизонтальные перемещения. Поплавок Т за счет конструктивной схемы имеет свободное перемещение в вертикальной и минимальное перемещение в горизонтальной плоскостях. С поплавком 1 жестко связаны два вертикально ориентированных акселерометра 3, на вход катушек дистанционного отклонения которых с генератора переменного тока 2 подают гармонический сигнал. Частота гармонического сигнала f выбирается в диапазоне fp f fc, где fo - частота верхней границы измеряемого диапазона волн, fc - собственная частота акселерометра, а его амплитуда равна А - Д Q/k , где A Q - порог реагирования акселерометра, k - крутизна характеристики катушки дистанционного отклонения.
Посредством гармонического сигнала обеспечивается колебание чувствительного элемента акселерометров с высокой частотой. В результате трение тюхоя инерцирн- ной массы акселерометров становится равной нулю, что обеспечивает снижение порога реагирования акселерометров и, следовательно, повышает точность измерения в области низких частот колебаний,
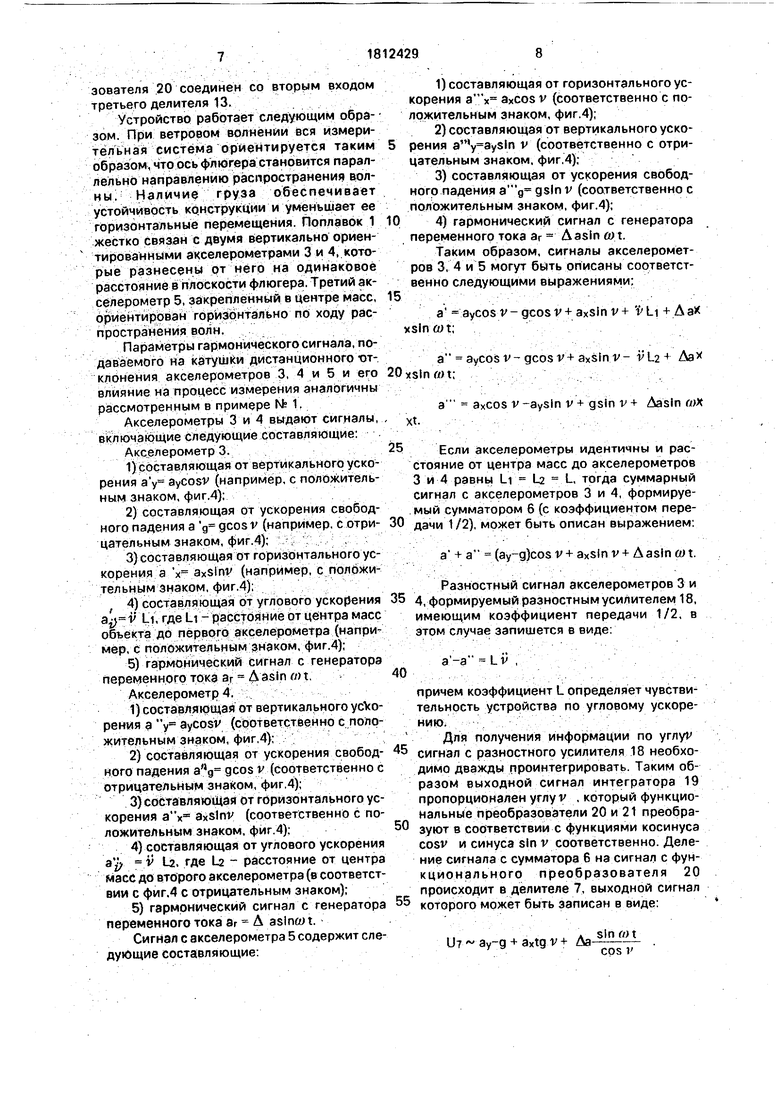
Акселерометры 3 выдают сигналы, включающие следующие составляющие: Первый акселерометр
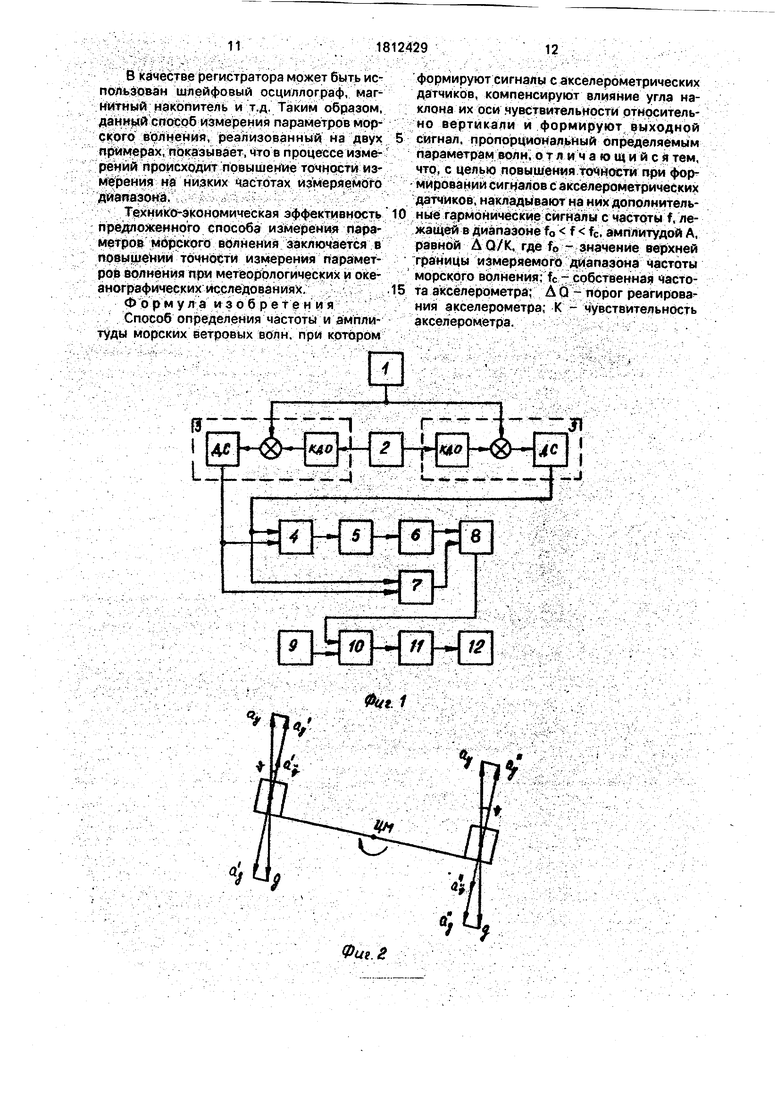
1) составляющая от вертикального уско- рения а у aycos v (например, с положительным знаком, фиг.2);
2) составляющая от ускорения свободного падения a g gcos v (например, с отрицательным знаком, фиг.2); 3) составляющая от углового ускорения . где Li - расстояние от центра масс объекта дб первого акселерометра (например, с положительным знаком, фиг.2);
4) гармонический сигнал с генератора переменного тока аг Aaslnw t. Второй акселерометр 1) составляющая от вертикального ускорения а у aycos v (соответственно с положительным знаком, фиг.2); 2) составляющая от ускорения свободного падения a g gcos v(соответственно с отрицательным знаком, фиг.2);
3) составляющая от углового ускорения аЈ v La, где La - расстояние от центра масс до второго акселерометра (в соответствии с фиг.2 с отрицательным знаком);
4) гармонический сигнал с генератора переменного тока аг Aasinwt.
Таким образом, сигналы первого и вто
рого акселерометров могут быть описаны соответственно следующими выражениями::
a aycos v-gcosv + v Li +Д 3$ a aycos v -gcos v - V La + Д asin т t.
Если акселерометры идентичны и расстояние от центра масс до акселерометров 3 равны Lt La L, тогда суммарный сигнал с двух акселерометров, формируемый сумматором 7 (с коэффициентом передачи 1 /2). может быть описан выражением
а + а (ay-g)cos v + A asin rw t.
Разностный сигнал с акселерометров, формируемый разностным усилителем 4, имеющим коэффициент передачи 1/2, в этом случае запишется в виде
a -a Lv .
причем коэффициент L определяет чувствительность устройства по угловому ускорению., .
Для получения информации по углу v сигнал с разностного усилителя 4 необходимо дважды проинтегрировать. Таким образом, выходной сигнал интегратора 5
пропорционален углу v, который функциональный преобразователь б преобразует в соответствии с функцией косинуса cosv. Деление сигнала с сумматора 7 на сигнал с функционального преобразователя б происходит в делителе 8, выходной сигнал которого может быть записан в виде
Us ay - g 4- Да sincos v
Сигнал с делителя 8, пропорциональный разности вертикального ускорения вол- нографа и ускорения свободного падения, поступает на один из входов разностного усилителя 10, на второй вход которого подается сигнал с источника опорного напряжения 9, пропорциональный значению ускорения свободного падения. Таким образом будет компенсироваться сЬстаеляю- ,щая от ускорения свободного падения.. Сигнал с разностного усилителя будет про- порционаяен следующей величине
U13 , ay 4- Да
cosv
Сигнал с разностного усилителя Ю.про- порционалЬный вертикальному ускорению поплавка датчика вертикальных колебаний уровня водной поверхности 1, дважды интегрируется двойным интегратором- 11. Двойной интегратор 1 f осуществляет фильтрацию сигнала для частот, лежащих выше измеряемого частотного диапазона волн, поэтому составляющая сигнала Ui3
U Да
stn со I cosV
где частота а определяется генератором переменного тока 2 не будет вносить пб- грещность в измерения тгрофиля волнения, регистрируемые регистратором 12.
В качестве акселерометров могут быть использованы датчики типа ДЛУММ (датчик линейных ускорений микроминиатюрный). Разностные усилители, сумматор и интеграторы могут быть выполнены на базе операционных усилителей серии 140УД14.
Функцио«альный преобразователь и делящее устройство Могут быть выполнены, например, на базе аналого-цифрового преобразователя 572ПВ Т, постоянно запоминающего устройства 568РЕ1 и цифро-аналогового преобразователя 572ПА2. В качестве регистратора может быть использован шлейфовый осциллограф, магнитный накопитель и т.д.
Заявляемый способ измерения параметров морского волнения может быть реализован и в устройстве по заявке на изобретение № 4497433 от 24.10.88 г. с 5 положительным решением о выдаче автор- ского свидетельства от 30.01.90 г.
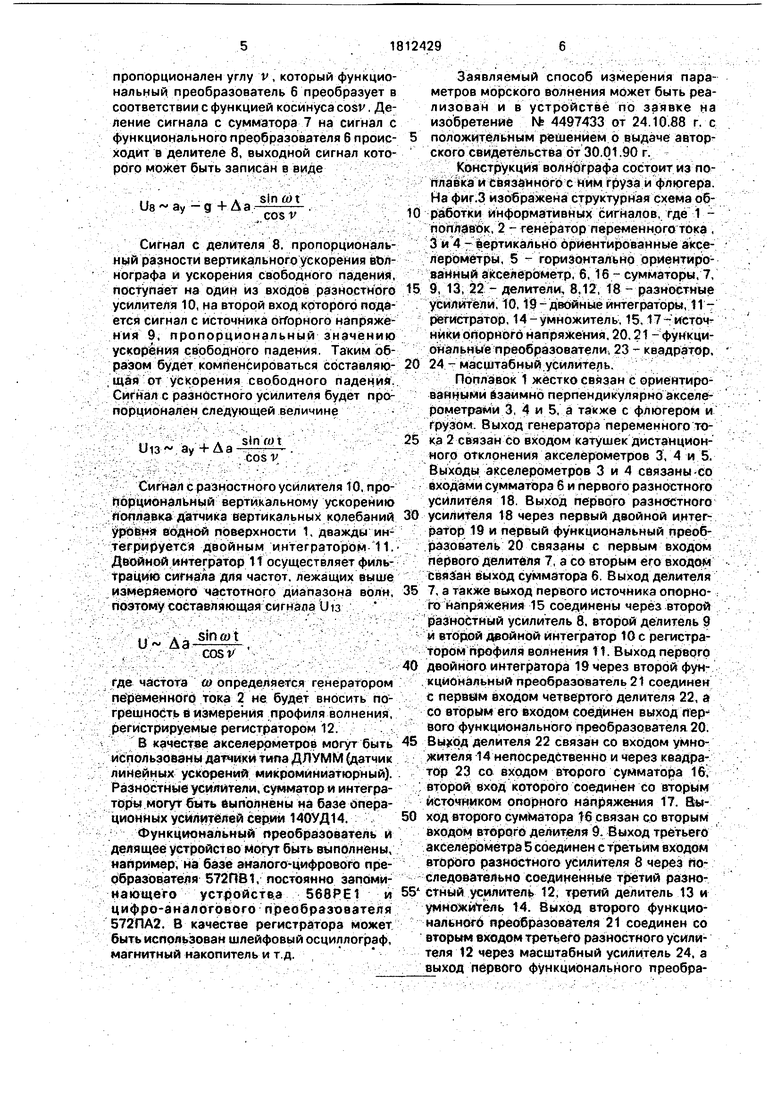
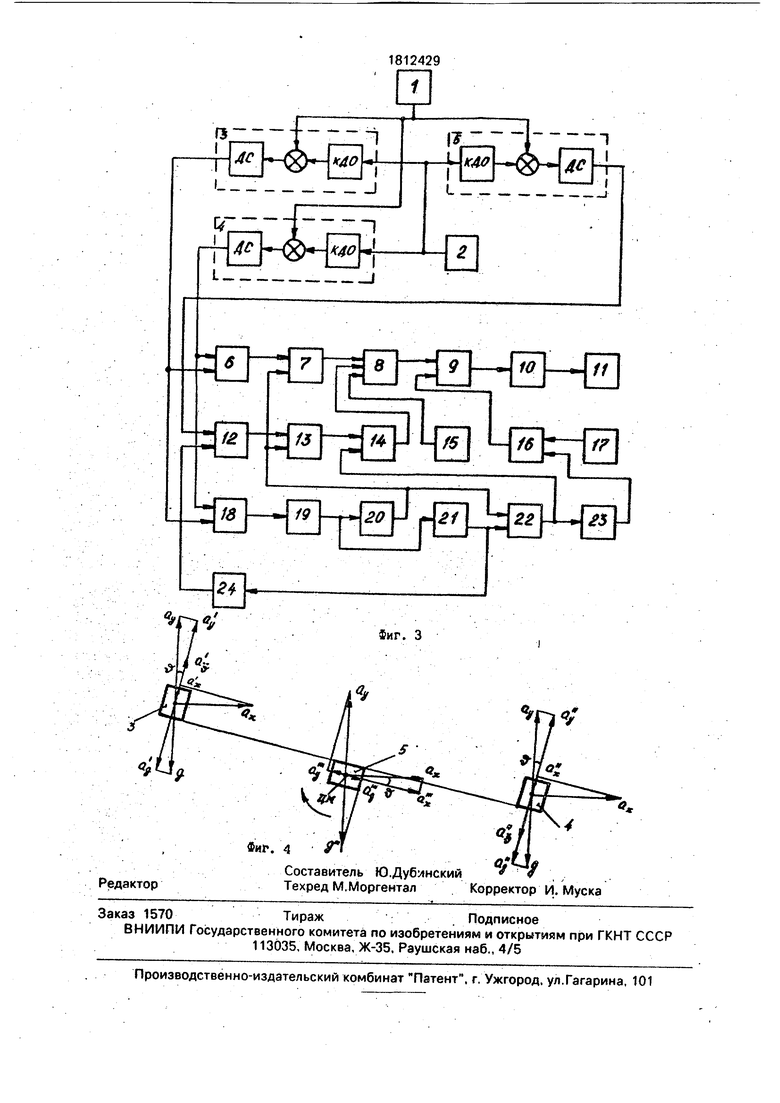
Конструкция волнографа сострит из по- плавка и Связанного с ним груза и флюгера. Йафиг.З изображена структурная схема об0 работки информативных сигналов, где 1 - пЬгтлавок, 2 - генератор переменного тока - 3 и 4 - вертикал ьно ориентирован ныё акселерометры, 5 v гориаонтаяьнб ориентиро- ванный аксеяёрЬмётр, 6.16 - сумматоры, 7,
5 9, 13, 22- делители, 8,12, 18 - разностные усилители 10,10 - двойные интеграторы, 11 - pefHcfpaiTop, 14-умножитель, 15,17т источг ники опорного напряжения, 20,21 - функциональные преобразователи, 23 - квадратор,
0 24-масщтабный усилитель,
Поплавок 1 жёстко связан с ориентиро- ванными взаимно перпендикулярно акселе - рометрамИ 3, 4 и 5, а также с флюгером и грузом. 8 ыход генератора пе реме нного то5 ка 2 связан со входом катушек дистанционного отклонения акселерометров 3, 4 и 5. Выходы акселерометров 3 и 4 связаны -co йходэми сумматора б и первого разностного усилителя 18. Выход первого разностного
0 усилителя 18 через первый двойной и.нтег- раТор 19 и первый функциональный преоб- разовэтель 20 связаны с первым входом
йёрвогоделитйля 7, асовторым егоаходом связан выход сумматора 6. Выход делителя
5 7, а также выход первого источника опорно- . го напряжёйия 15 соединены через второй ; разностный усилитель 8. второй делитель 9 : и второй двойной интегратор 10 с регистратором профиля волнения 11. Выход первого
0 двойного интегратора 19 через второй фун- кциональный преобразователь 21 соединен С первым входом четвертого делителя 22, а со вторым его входом соединен выход пер- вого функционального преобразователя 20.
5 делителя 22 связан со входом умножителя 14 непосредственно и через квадратор 23 со входом второго сумматора 16, ; второй вход которого соединен со вторым источником опорного напряжения 17. Вы0 ход второго сумматора W связан со вторым входом второго делителя 9. Выход третьего акселерометра 5 соединен с третьим входом второго разностного усилителя 8 через последовательно соединенные третий разно5 стный усилитель 12, третий делитель 13 и умножитель 14. Выход второго функцио- нальногб преобразователя 21 соединен со вторым входом третьего разностного усилителя 12 через масштабный усилитель 24, а выход первого функционального преобразователя 20 соединен со вторым входом третьего делителя 13.
Устройство работает следующим образом. При ветровом волнении вся измерительная система ориентируется таким образом, что ось флюгера становится параллельно направлению распространения волны ; Нал ичие груза обес печивает устойчивость конструкции и уменьшает ее горизонтальные перемещения. Поплавок 1 жестко связан с двумя вертикально ориентированными акселерометрами 3 и 4, которые разнесены от негр на одинаковое расстояние в плоскости флюгера. Третий акселерометр 5, закреплённый в центре масс, ориентирован горизонтально по ходу распространения волн.
Параметры гармонического сигнала, подаваемого на катушки дистанционного хэт- клбнения акселерометров 3, 4 и 5 и его влияние на процесс измерения аналогичны рассмотренным в примере № 1.
Акселерометры 3 и 4 выдают сигналы, включающие следующие составляющие:
Акселерометр 3.
1)еЬставляющая от вертикального ускорения а у aycosv (например, с положительным знаком, фиг.4);
2) составляющая от ускорения свободного падения a g gcos v (например, с отрицательным знаком, фиг.4); ч ; ; ,
3) составляющая от горизонтального ускорения а х axSinv (например, с положительным знаком, фиг.4);
4) составляющая от углового ускорения Li, где Li - расйтояниё от центра масс объекта до первого акселерометра (напри- мёр, с положительным знаком, фиг.4);
5) гармонический сигнал с генератора переменного тока ar Aasin in t, Акселерометр4. ;
1) составляющая от вертикального ycVo- рения а у aycosv (соответственно с .положительным знаком, фиг,4);
2) составляющая от ускорения свободного падения gcos v (соответственно с Отрицательным знаком, фиг.4);
3) составляющая от горизонтальногоускорения 3xslnv (соответственно с положительным знаком, фйг.4);
4) составляющая от углового ускорения а#. v Li, где L2 - расстояние от центра масс до второго акселерометра (в соответствии с фиг.4 с отрицательным знаком);
5) гармонический сигнал с генератора переменного тока аг A aslnwt.
Сигнал с акселерометра 5 содержит следующие составляющие:
1) составляющая от горизонтального ускорения axcos v (соответственно с положительным знаком, фиг.4);
2) составляющая от вертикального уско- 5 рения a Hy aysln v (соответственно с отрицательным знаком, фиг.4);
3) составляющая от ускорения свободного падения gsln v (соответственно с Положительным знаком, фиг.4); 10 4) гармонический сигнал с генератора переменного тока аг Л asin ft) t.
Таким образом, сигналы акселерометров 3, 4 и 5 могут быть описаны соответственно следующими выражениями: 1В.- .: .-.- . - ,-. -. ., - , а aycos v - gcos v + axsln v + v Li + Л а xsinfwt;
a aycos v-gcos v+axsin v- vL2+ Да 20xs1nft t;
xt.
a axcos v -aysin v + gsin v + Aasin
Если акселерометры идентичны и расстояние от центра масс до акселерометров 3 и 4 равны Li L, тогда суммарный сигнал с акселерометров 3 и 4, формируемый сумматором 6 (с коэффициентом передачи 1 /2), может быть описан выражением:
а + а (ay-g)cosv+axslnv-f-Aasln cot.
Разностный сигнал акселерометров 3 и 4, формируемый разностным усилителем 18, имеющим коэффициент передачи 1/2, в этом случае запишется в виде:
40
а -а L v
причем коэффициент L определяет чувствительность устройства по угловому ускоре- нию/. -. ... .,. : :
Для получения информации по ymyv сигнал с разностного усилителя 18 необходимо дважды проинтегрировать. Таким образом выходной сигнал интегратора 19 пропорционален углу v , который функциональные преобразователи 20 и 21 преобра
зуют в соответствии с функциями косинуса
cosv и синуса sin v соответственно. Деление сигнала с сумматора 6 на сигнал с функционального преобразователя 20 происходит в делителе 7, выходной сигнал которого может быть записан в виде:
+ axtgv+ .
cosv
Сигнал с функционального преобразователя 21, пропорциональный синусу угла наклона v через масштабный усилитель 24 с коэффициентом усиления, равным ускорению свободного падения, поступает на один из входов разностного усилителя 12, на второй вход которого подается сигнал с акселерометра 5, Таким образом, будет компенсироваться составляющая от ускорения свободного падения в сигнале с горизонтально расположенного акселерометра 5, Сигнал с разностного усилителя 12 будет пропорционален следующей величине:
Uia axcos v -aysln v + Д asin an.
В Делителе 13 происходит деление сигнала с разностного усилителя 12 на сигнал, пропорциональный косинус угла наклона с функционального преобразователя 20:
Ui3 ax-aytg v+ Да
sin rut cos v
После чего сигнал с делителя 13 поступает на один из входов умножителя 14.
В делителе 22 производится деление сигналов с функциональных преобразователей 20 и 21, пропорциональных соответственно косинусу и синусу угла наклона таким образом, что выходной сигнал делителя 22 пропорционален тангенсу угла наклона. Далее этот сигнал подается на вход квадратора 23 и на второй вход умножителя 14, выходной сигнал с которого может быть описан следующий зависимостью:
v -aytg2v +
+ Да tgv
slnm cos v.
Вычитание сигнала, пропорционального ускорению свободного падения с источника опорного напряжения 15 и сигнала с умножителя 14 из сигнала с делителя 7, производится разностным усилителем 8. Его выходной сигнал будет пропорционален следующей величине:
Us ay ( 1 +tg2v) +
+Aajia« i(1+tgV).
COSV
Для устранения влияния на полученный сигнал угла наклона v в сумматоре 16 производится сложение сигналов, поступающих с квадратора 23 и с источника опорного
напряжения, пропорциональных соответственно квадрату тангенса угла наклона v и единичному сигналу. В этом случае суммарный сигнал, подаваемый на один из входов делителя 9 с сумматора 16 будет иметь вид:
Ui6 I + tg2 v.
На второй вход делителя 9 подается сиг- нал с разностного усилителя 8:
Ug av + Да
sin ft t I 4- tg v
COS V | + tg2 V
Сигнал с делителя 9, пропорциональный вертикальному ускорению поплавка, дважды интегрируется двойным интегратором 10 и регистрируется регистратором профиля волнения 11. При двойном интегрировании сигнала с делителя 9 составляющая:
25
sinftjt 1 4- tgv cosv i+tg2v
будет отфильтрована, т.к. заданная частота а) лежит выше измеряемого частотного диапазона волнения.
30 качестве акселерометров могут быть использованы датчики типа ДЛУММ (датчик линейных ускорений микроминиатюрный).
Источники опорного напряжения, разностные усилители и сумматоры могут быть
35 выполнены на базе операционных усилителей серии 140 (см., например, Лихачев В.Д, Практические схемы на операционных усилителях. --М.: Издательство ДОСААФ СССР, 1981, с.80), умножитель, квадратор,
40 масштабный усилитель и делители - на базе микросхем серии 525 (см., например, Алек- сенко А.Г., Коломбет Е.А., Стародуб Т.И. Применение прецизионных аналоговых ИС, - М.: Радио и связь, 1981, с.224). Интеграто45 ры могут бьггь выполнены, например, с частотно-зависимыми обратными связями, позволяющими проводить интегрирование в заданном диапазоне частот (см. статью Дубинский Ю.В., Ференёц А.В. Инерциаль50 ный преобразователь вертикальной скорости. В кн.: Системы и элементы электрооборудования летательных аппаратов. Межвузовский сборник. Казань, 1986. с.89-92). Функциональные преобразовате55 ли могут быть выполнены, например, на базе аналого-цифрового преобразователя 572ПВ1, постоянно запоминающего устройства 568РЕ1 и цифроаналогового преобразователя 572 ПА2.
В качестве регистратора может быть использован шлейфовый осциллограф, магнитный накопитель и т.д. Таким образом, да об зм рения параметров мор- ското; лвШ ейййу реализованный на двух примерах, показывает, что/в процессе йзмерений ripOMexoflvi
мерения на низких частотах измеряемого . :-у- :Ц. .
Тб|Хйико-экономйческая эффективность предпрясенного способа измерения параметров морского волнения заключается в повышении точности измерения параметров волнения при метеорологических и океанографических исследованиях. Д v i
Ф Ормуяа изобретения
Способ определения частоты и ймплй- туды морских ветровых волн, при котором
Фиег
0
формируют сигналы с акселерометрических датчиков, компенсируют влияние угла наклона их оси .чувствительности относительно вертикали и формируют выходной сигнал, пропорциональны определяемым параметрамгволн; л и ч а ю щи и с и тем, что, с целью повышения точности при формировании сигналов с акселерометрических датчиков, накяадьгвают на них дополнитель- нь№ гарМойичёск е;сигналаf.c частоты f, ле- жащей в Диапазоне f0 f fc. амплитудой А, равной АО/К. где ft г значение верхней границы измеряемого диапазона Частоты морского волнения;;% собственная частотаакселерометра; A Q порог реагирования акселерометра; К - чувствительность ксел;ерометраг.-;л-- -:; :: :: : ;-:.у;.::-:;;: ;. .
Иге-/-.
/
нД
| Волнограф | 1987 |
|
SU1613861A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
