1
Изобретенне относится к области следящих систем общего назначения и может быть использовано для новышепия качества и устойчивости гидронриводов.
Известна электрогидравлическая следящая система, содержащая блок датчиков давления, последовательно соединенные первое сравпн1ваюп;ее устройство, сумматор, первый усилитель, второе сравиивающее устройство, электрогидравлический усилитель, источннк нитания и гидродвнгатель, выход которого соединеи с одним из входов иервого сравнивающего устройства, а первый корректирующий коптур соединен через второй усилитель с одним из входов Bljporo сравнивающего устройства.
Предлагаемая система отличается от известных тем, что, с целью повышения качества, точности и устойчивости работы злектрогидравлнческой следящей системы она содержит блок умножения, второй корректирующий контур, входы второго и нелинейного корректирующих контуров соединены с выходами блока датчиков давления, а выходы через блок умножения - с одним из входов сумматора, наиример, с входом первого сумматора.
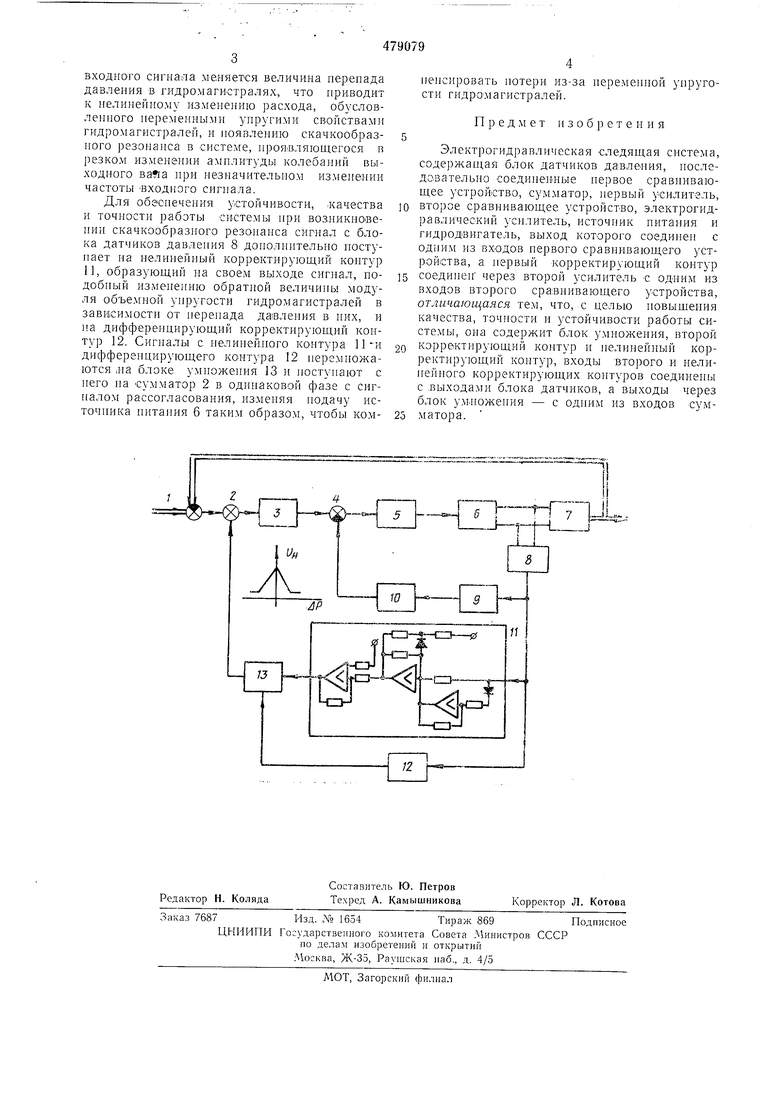
На чертеже представлепа схема предлагаемой электрогндравлической следящей системы.
Система содержит последовательно соединенные первое сравнивающее устройство 1, сумматор 2, нервый усилитель 3, второе сравнивающее устройство 4, электрогидравлнче5 ский усилитель 5, источник питания 6, гндродвнгатель 7, и элементы корректирующих цепей: блок датчиков давлеиия 8, нервый корректирующий контур 9, BTOpoii уснлитель 10, иелииейный корректирующнй контур 11, второй корректирующий .контур 12 нблок умиол ення 13.
Прн работе системы сравиивающее устройство 1 выдает сигнал рассогласования ноложений задающего и выходиого валов системы. Сигнал рассогласования через сумматор 2, первый усилитель 3 и сравнивающее устройство 4 поступает на вход электрогидравлического усилнтеля 5, который унравляет изменением нодачи источника пнтания 6. Эта
0 нодача расходуется на утечки в гидромашинах, нелинейные объемные нотери на растяжение гибких шлангов и сжатие рабочей жидкости и расход гидродвигателя 7 для обесиечеиия необходимого изменения иоложеиня
5 выходного вала системы. Для стабилизации системы снгиал, нропорциопальный перепаду давления в гидромагистралях, с блока 8 датчнков давления через корректирующнй контур 9 и усилитель 10 поступает на сравпнвающее устройство 4. С изменением частоты
входного сигнала меняется величина перепада давления в гидромагистралях, что приводит к нелинейному изменению расхода, обусловленного переменнымн унругими свойствами гидромагистралей, и появлению скачкообразного резонанса в системе, проя вляющегося в резком изменении амнлитуды колебаний выходного ваЯа при незначительном изменении частоты ВХОДНОГО сигнала.
Для обеспечения устойчивости, .качества и точности работы с}1стемы при возиикповении скачкообразиого резонаиса сигнал с блока датчиков давления 8 дополннтельпо поступает па пелппейпый корректпрующий контур 11, образующий на своем выходе сигнал, подобпый измеиеиию обратной величины модуля объемной упругости гидромагистралей в зависимости от перепада даюлепия в них, и па диффереппирующпй корректпрующий контур 12. Сигиалы с нелинейного контура диффереицирующего контура 12 перемножаются ла блоке умножения 13 и поступают с пего на сумматор 2 в однпаковой фазе с сигпалом рассогласования, изменяя подачу источника ннтанпя 6 таким образом, чтобы ком4
переменной упругопепсировать потерн из-за сти гидромагистралей.
Предмет и з о б р е т е н п я
Электрогидравлическая следящая система, содержащая блок датчиков давления, последо.зательно соединенные первое срав 1ивающее устройство, сумматор, нервый усилитель, второе сравнивающее устройство, электрогидравлический усилитель, источник иитания и гидродвигатель, выход которого соединен с одним из входов первого сравнивающего устройства, а первый корректирующий контур соединен через второй усилитель с одним из входов второго сравннвающего устройства, отличающаяся тем, что, с целью повышения качества, точности и устойчивости работы системы, она содержнт блок умножения, второй корректирующий контур и нелинейный корректирующий Koirryp, входы второго и нелинейного корректирующих коитуров соединены с .выходами блока датчнков, а выходы через блок уМНОжения - с одним из входов сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1986 |
|
SU1399521A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1530823A1 |
| Корректирующее устройство | 1975 |
|
SU533907A1 |
| Электрогидравлическая следящая система | 1985 |
|
SU1317189A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| Электрогидравлический следящий привод | 1986 |
|
SU1346858A1 |
| Электрогидравлический следящий привод | 1984 |
|
SU1195076A1 |
