Предлагаемая следящая система каса - ется электрического и электрогидравлического следяшего привода и может быть использована при проектировании безлюф товых двухдвигательных следящих систем с раздельными усилителями мощности.
Известна следящая система с компен. сацией люфта механической передачи, содержащая два контура управления исполнительными двигателями, каждый из которых состоит из последовательно соединенных сумматора, усилителя мощности, исполнительного двигателя, редуктора, связанного с объектом регулирования через общую силовую шестерню, и элементов отршштельных обратных связей по скорости и моменту исполнительного двигателя; источник сигнала положительного смещения момента, выход которого соединен с одним из входов сумматора контура управления одним исполнительным двигателем, второй вход которого через вентиль в обратном направлении связан с выходом элемента сравнения. Кроме того, выход источника сигнала положительного смещения
момента соединен через инвертор с одним из входов сумматора контура управления другим исполнительным йЬигателем, второй вход которого через вентиль в прямом направлении соединен с выходом элемента сравнения р.| .
Низкий КПД системы, невозможность получения на валу объекта момента, превыщающего момент, развиваемый каждым исполнительным двигателем в отдельности является недостатком известной указанной следящей системы.
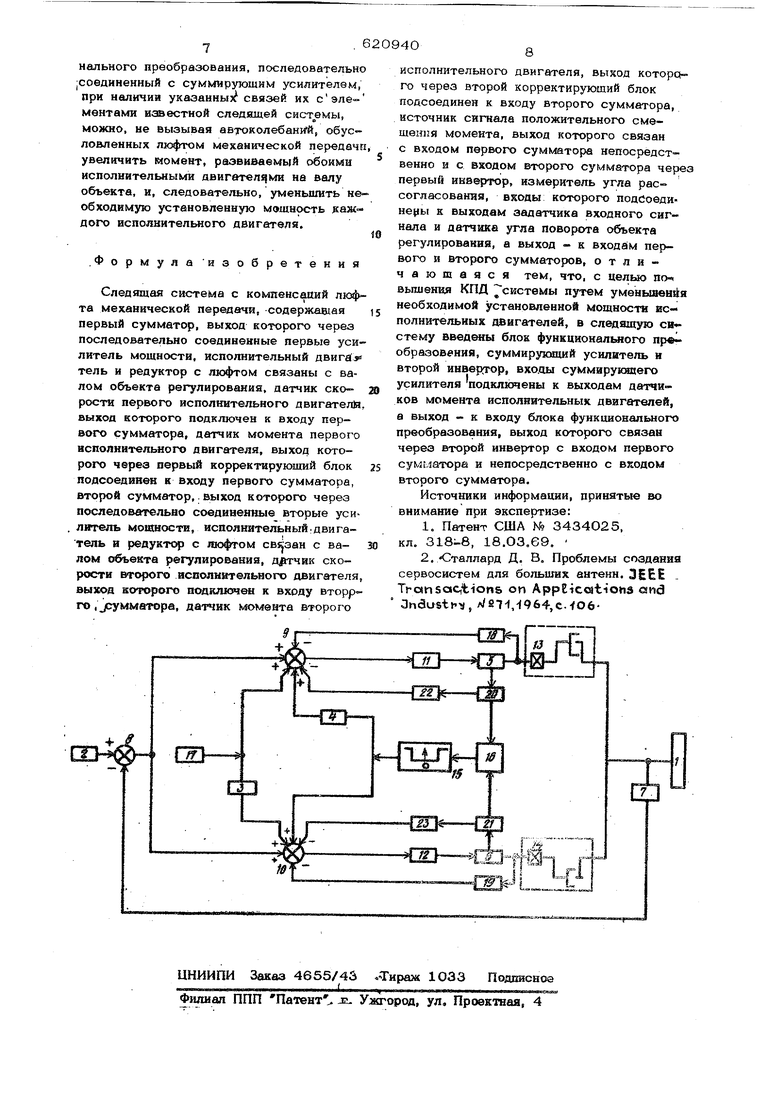
Наиболее близкой по технической сущности к предложенной системе является двухдвигательная следящая система с компенсацией люфта в механической передачи/ содержащая первый сумматор, выход которого через последовательно соединенные первые усилитель мощности, исполнительный двигатель и редуктор с люфтом связаны с валом объекта регулирования, датчик скорости первого исполнительного двигателя, выход которого подклзочен к входу первого сумматора, датчик момента первого исполнительного двигателя выход которого через первый корректирую щий блок подсоединен к входу nepaoto сумматора, второй сумматор, .выходкоторого последовательно соединенные вторые усилитель мощности, испопнительный двигатель и редуктор с люфтом связан с валом объекта регулирования, датчик скорости второго исполнительного дви гателя, выход которого подключен к входу второго сумматора, датчик момента второ го исполнительного двигателя, выход кото рого через второй корректирующий блок подсоединен к входу второго сумматора, источник сигнала положчтельного смещения момента, выход которого связан с входом первого сумматора непосредственно и с входом второго сумматора чфез первый инвертор, измеритель угла рассог ласования, входы которого подсоединены/ к выходам задатчика входного сигнала и датчика угла поворота объекта регулирования, а выход - к входам первого и втек рого сумматоров J2j . Недостаток этой известной следящей системы заключается в том, что результирующий момент, развиваемый обоими ис полнительными двигатепями на валу объек та, меньше суммы моментов этих исполнительнь1Х двигателей на «величину, равную двойному значению момента, развиваемого каждым исполнителЬныК) двигателем и вызванного сигналом ис-Дочника положительного смещения MOMeHiJja, достаточ ного при отсутствии управляющего воздействия и возмущающего момен -а для устранения автокрлебаний, обусловл.енных наличием люфта. Цель предлагаемой следяацей системы увеличение ее КПД путем уменьшения необходимой установленной мощности каждого нсполнительного двигателя. Зто достигоется тем, что в слёд:ацую систему введе ны блок функвяональиого преобразования, суМмируюший усилитель и второй инвертор, входы суммирукидего усилителя ПОДКЛЮЧШ1Ы к выходам датчиков исполиительи41х двигателей, . а выход - к входу блока функционально го преобразования, выход которого связан через Второй 1швертор с входом первого сумматора и непосредственно с вхо« дом второго сумматора. . На чертеже изображена блок-схема , двухдвигательной следящей системы с ком пенсацией люфта механической перед чи Следящая система с аержвт объект 1 регулирования задатчик 2 входного сигнала, первый, инвертор 3, .второй инвертор 4, первый исполнительный двигатель 5, второй исполнительный двигатель 6, дат« 7 угла поворота объекта регулирования, измеритель 8 угла рассогласования, первый сумматор 9, второй сумматор 10, первый усилитель 11 мощности, второй усилитель 12 мощности, первый редуктор 13 с люфтом, второй редуктор 14 с люфтом, блок 15 функционального преобразования, суммирующий усилитель 16, источник 17 положительного смещения момента, датчик 18 скорости первого исполнительного двигателя, датчик 19 скорости второго ис- . полнительного двигателя, датчик 20 момента первого исполнительного двигателя, датчик 21 момента второго исполнителького- двигателя, первый корректирующий блок 22, Второй корректирующий блок 23. Предлагаемая следящая система работает Следующим образом. Сигналы с выхода датчиков 20 21 момента, пропорциональные моментами M,j и М t развиваемым исполнительными двигателями 5 и 6, поступают На суммирующий усилитель 16, на выходе которого получается сигнал КМ2, К где К - коэффициент пропорциональности. Полученный сигнал К АЛ j, преобразуется в сигнал Fj. в блоке 15 функционального преобразования, имеющем характеристику в виде четной нелинейной функции Р релейного типа с зоной нечувствительности Хц и предельным значением о В KOHTjpe управления первым исполнительным двигателем 5 сигнал ЕО с выхода источника 17 положительного смещения момента подается на один из входов первого сумматора 9, на другие входы которого поступают инвертированный сигнал - блока 15 функционального преобразования, сигнал -в рассогласования с выхода измерителя 8 угла рассогласования и си пиалы . отрицательных обратных связей по скорости и моменту исполнительного двигателя 5. Полученный на выходе сумматора 9 сигнал Eg-F-j (2 через первый усилитель 11 мощности подается на исполнительный двигатель 5, в пвигателя результате чего на валу этого развивается момент М - Мо-Мргде MO - составляющая момента, обусловленная сигналом источника 17 положительного смещения момента и достаточная для устранения автоколебаний, выз ванных люфтов механической передачи, (при отсутствии сигнала задатчика 2 &XQDного сигнала и отсутствии возмущающего момента, приложенного к валу объекта 1 регулирования; р - составляющая момента, развиваемого исполнительным двигателем 5, обусловленная сигналом - F fv 11 - возмущающий момент, при ложенный к валу объекта 1 регулирования. В контуре управления вторым исполнительным двигателем 6 сигнал + Е- с выхода источника 17 положительного смещения момента через инвертор 3 подается на один из входов сумматора 10, на другие входы которого поступает сигнал Fe выхода блока 15 функционального преобразования, сигнал рассогласования Q с выхода измерителя 8 угла рассо1 лесования и сигнал в.., отрицательных обратных связей по скорост и моменту Второго исполнительного двигателя 6. Полученный на выходе сумматора 1О -Ee- F -fe-a сигнал и. через усилитель 12 мощности подается на второй исполнительный двигатель 6, в результате чего на валу этого двига;теля развивается момент М2--Мо: МрЧ-.(-гТ Эти моменты М и М- через редукто ры 13 и 14 передаются на вал объекта 1 регулирования, создавая момент МдМ.,-f-M..(6) При малых значениях возмущающего момента АЛ , при которых сигнал К АЛ 21 на выходе суммирующего усилителя 16 не превыщает щирину X зоны нечувствительности блока 15 фуикцио нальиого преобразования, сигнал на его выходе равен нулю; на выходах суммато1 ров 9 и 10 отсутствуют составляющие t Р ; выбор люфтов механической передачи осуществляется (/моментами, противоположными по знаку, приложенными к валу объекта 1 со стороны исполнитель ных двигателей 5 и 6, /Мй ;. V.7# ,2 . f8 При значениях возмущающего момента Ри которых сигнал К Mj, превышает величину Хц,, сигнал Fc на выходе 15 функционального преобт разованвя отличается от нуля. В каждоь канале происходит компенсация сигнала i Eg источника 17 положительного смещения момента сигналом (чае тичная йри О FO ЕО и полная при FO ЕО ) Моменты, приложенные к алу объекта 1 со стороны исполнительых двигателей 5 и 6 через редукторы 13 и 14, равны по величине и одинаковы 12 22Выбор люфтов осуществляется возмущающим момента Мц . При этом, если ,., /Мвг:2Мр,(н) компенсация сигналов 4 Е при значениях;К-2- Х„(2 сигналами F не приводит к воаникновению автоколебаний в следящей системе, но позволяет увеличить момент, развиваемый исполнительными двигателями 5 и 6 на валу объекта 1, и, следовательно, уменьшить необходимую установленную мощность кажаого : исполнитёльного двигателя 5 и 6. Действительно, в пред пагаемой следящей системе при больших. значениях возмущающего момента , - ) р соответствии с выражением 9 и 1О момент, развиваемый исполнительными двигателями 5 и 6 на валу объекта 1 регулирования равен В известной следящей системе, которую можно рассматривать частный случай предлагаемый следящей системы при X ,при , что один из исполнительных двигателей, например первый, развивает такой же момент, как и в предлагаемой следящей системе, т.е. при момент, развиваемый вторым исполнительным двигателем/меньше момента, развиваемого первым исполнительным двнгв телем на величину двойного момента 2Мо 2Еое,(16) вызванного сигналом ЕО источника положительного смещения момента и достаточного для подавления автоколебаний, обусловленных люфтом .ат) Момент, развиваемый нсполнительныкш двигателями на валу объекта регулирования, в саответствии с выражениями 6 и .fi81 Из сравнения выражений 14 и 16 следует, что, вводя в известную двухдвигательную следящую систему блок функцио-
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления телескопом | 1980 |
|
SU974334A1 |
| Следящая система | 1980 |
|
SU885970A1 |
| Устройство для компенсации люфта в двухдвигательном приводе | 1978 |
|
SU746399A1 |
| Двухдвигательный привод | 1981 |
|
SU1012195A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| Автоматическая микропроцессорная система регулирования температуры энергетической установки транспортного средства | 2016 |
|
RU2645519C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Устройство для управления двухдвигательным электроприводом | 1978 |
|
SU864477A1 |
| Двухдвигательная следящая система | 1980 |
|
SU901992A1 |
