о-г - (Ж2. Z .
(2)
Изобретение относится к гидроавтомати- ке и может быть использовано в приводах промышленных роботов и манипуляторов.
Целью изобретения является повышение
точности и расширение функциональных воз- ц тельно й обратн о й связью п о пе ре паду можностеи.давлений на выходах 19 и 20. Гистерезис
На фиг. 1 изображена предлагаемая
где Т - постоянная времени усилителя 4. Усилитель 4 выполняется с внутренней отриРО усилителя 4 должен соответствовать соотношению
10
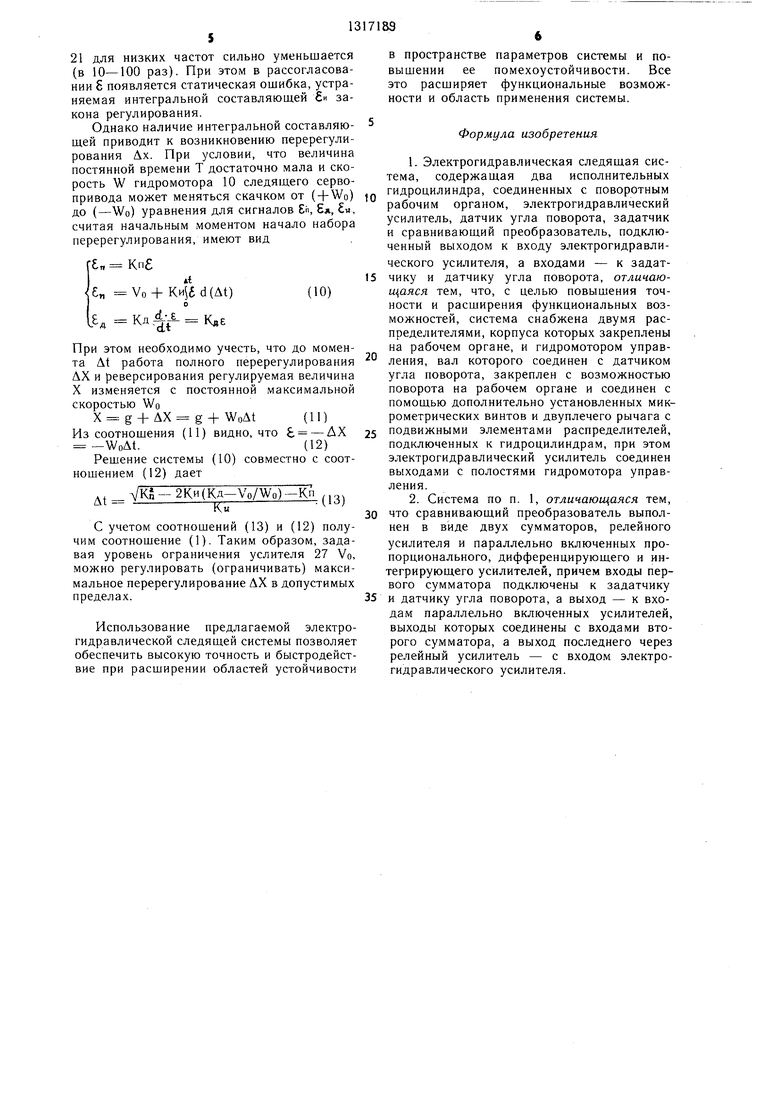
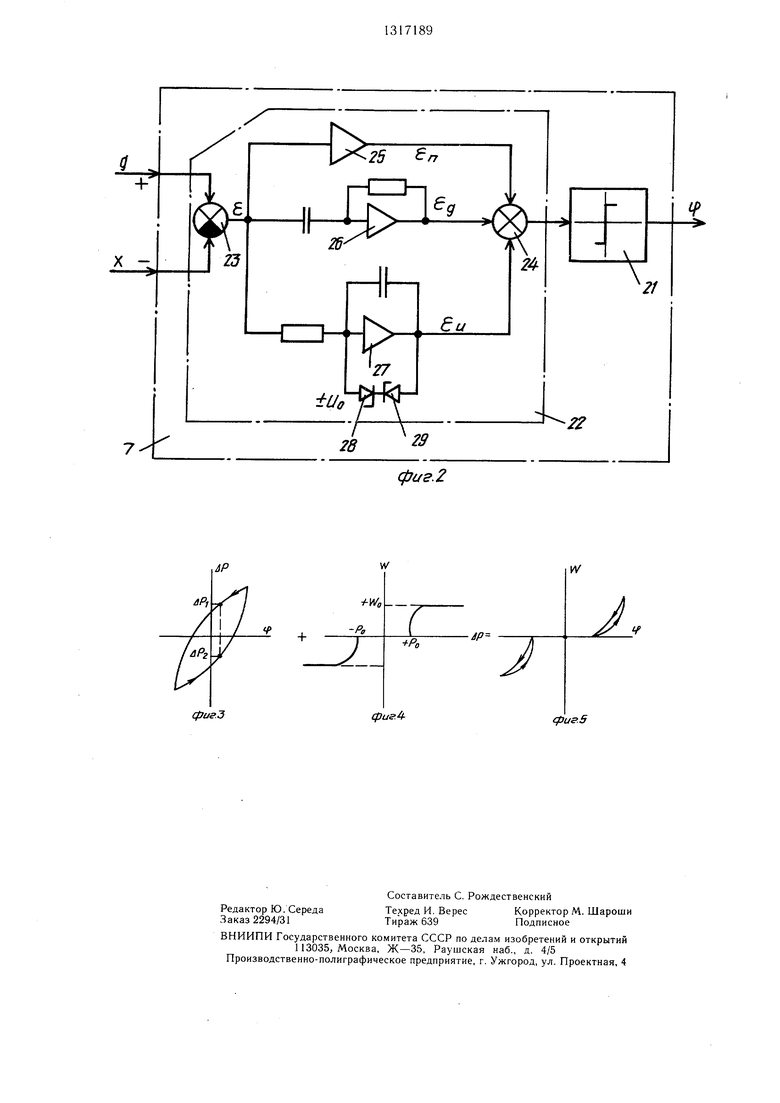
электрогидравлическая следящая система; на фиг., 2 - структурная схема сравниваю- ш,его преобразователя; на фиг. 3 - статическая характеристика электрогидравлического усилителя; на фиг. 4 - график скорости поворота вала гидромотора; на фиг. 5 - статическая характеристика разомкнутого контура привода гидромотора. Электрогидравлическая следящая систе- ма содержит два встречно включенных исполнительных гидроцилиндра 1 и 2, соединенных с поворотным рабочим органом 3, электрогидравлический усилитель 4, датчик 5 угла поворота, задатчик 6 и сравнивающий преобразователь 7, подключенный выходом к 20 входу усилителя 4 и входами - задатчику 6 и датчику 5. Система снабжена распределителями 8 и 9, корпуса (не показаны) которых закреплены на рабочем органе 3, и гидромотором 10 управления, вал 11 котоРО усилителя 4 должен соответствовать соотношению
МАХ/АР, - ,
(3)
где АР| и ДР2 - разности перепадов давлений на выходах 19 и 20. Распределители 8 и 9 соединены с напорной и сливной линиями 30 и 31.
Электрогидравлическая следящая система работает следующим образом.
С задатчика 6 на вход преобразователя 7 подается задающий сигнал «52, по которому сформируется входной сигнал «ф усилителя 4.
Усилитель 4 вырабатывает гидравлический сигнал перепада давлений АР, подаваемый в полости гидромотора 10. Вал 11 с рычагом 14 поворачивается, например, по часовой стрелке (g, ф и АР положительны). В результате вращения поворотроге соединен с датчиком 5, закреплен с - ного вала 11 с двухплечим рычагом 14
возможностью проворота на рабочем органе 3 и соединен с помощью дополнительно установленных микрометрических винтов 12 .и 13 и двуплечего рычага 14 с подвижными подпружиненными элементами 15 и 16
микрометрический винт 12 утапливает элемент 15 распределителя 8 и напорная линия 30 оказывается соединенной с гидроцилиндром 1. В то же время микрометрический винт 13 отходит от элемента 16 расраспределителей 8 и 9, подключенных к гид- пределителя 9, освобождая его. Будучи под- роцилиндрам 1 и 2, а усилитель 4 соеди-пружинен, элемент 16 распределителя 9 выходит из его корпуса и распределитель соединяет сливную линию 31 с гидроцилиндром 2.
Гидроцилиндры 1 и 2 начинают поворачивать рабочий орган 3 по часовой стрелке
нен выходами с полостями (не показаны) гидромотора 10. Вал 11 установлен на подшипнике 17 качения и подшипнике 18 скольжения. Усилитель 4 имеет прямой и инверс- ный выходы 19 и 20.так, что он отслеживает положение двухплеСравнивающий преобразователь 7 вы-чего рычага 14.
полнен в виде релейного усилителя 21, аПо мере движения поворотного вала
также образующих ПИД - регулятор 22, пер- И выходной сигнал «х датчика 5 угла вого и второго сумматоров 23 и 24 и парал-нарастает и вычитается из выходного сигналельно включенных пропорционального диф- 40 ла (уставки) «g задатчика 6, сводя к ну- ференцируюшего и интегрирующего усили- лю рассогласование 6. Когда величина станет близкой к нулю, сигналы «ф и А«Р также уменьшаются, и поворотный вал 11 прекращает движение. При этом валом 11
г--- ---.- -j- г будет отработана уставка g. Как только вал
матора 24, а выход последнего, через усили- 11 останавливается, дальнейшее движение тель 21 - с входом усилителя 4. Усили-приводит к тому, что элемент 15 распределителя 8 выходит из его корпуса, так как микрометрический винт 12 отстает, а элемент 16 распределителя 9 «набегает на
р,.„.-,,.г, „„.wM...w г,,па..с.,г,лп1с,,171 , СП микрометрический винт 13 и утапливается, по амплитуде. Уровень ограничения ±VoНапорная линия 30 отключается от гидроопределяется из соотношенияцилиндра 1, а сливная линия 31 - от гидVo (KnAXV2Wo) +KnAX+KDWo, (1)роцилиндра 2 и электрогидравлическая следятелей 25-27, причем входы сумматора 23 подключены к задатчнку 6 и датчику 5, а выход - к входам усилителей 25-27, выходы которых соединены с входами сумтели 25-27 имеют коэффициенты передачи Кп, KD, Ки. Усилитель 27 снабжен стабилитронами 28 и 29, обеспечивающими ограничение выходного сигнала 6„ усилителя 27
(и
где АХ - заданное перерегулирование сигнала датчика 5; Wo - максимальная скорость измене- 55
ния сигнала датчика 5.
Соотношение коэффициентов усиления усилителей 25 и 26 составляет
шая система занимает новое устойчивое положение, отследив задающий сигнал «g. При уменьшении величины g знаки сигналов «ф и А«Р изменяются на противоположные и все описанное выше повторяется с той разнице, что движение происходит
о-г - (Ж2. Z .
(2)
ц тельно й обратн о й связью п о пе ре паду давлений на выходах 19 и 20. Гистерезис
где Т - постоянная времени усилителя 4. Усилитель 4 выполняется с внутренней отриРО усилителя 4 должен соответствовать соотношению
10
20
МАХ/АР, - ,
(3)
где АР| и ДР2 - разности перепадов давлений на выходах 19 и 20. Распределители 8 и 9 соединены с напорной и сливной линиями 30 и 31.
Электрогидравлическая следящая система работает следующим образом.
С задатчика 6 на вход преобразователя 7 подается задающий сигнал «52, по которому сформируется входной сигнал «ф усилителя 4.
Усилитель 4 вырабатывает гидравлический сигнал перепада давлений АР, подаваемый в полости гидромотора 10. Вал 11 с рычагом 14 поворачивается, например, по часовой стрелке (g, ф и АР положительны). В результате вращения поворотного вала 11 с двухплечим рычагом 14
ного вала 11 с двухплечим рычагом 14
микрометрический винт 12 утапливает элемент 15 распределителя 8 и напорная линия 30 оказывается соединенной с гидроцилиндром 1. В то же время микрометрический винт 13 отходит от элемента 16 рас пределителя 9, освобождая его. Будучи под- пружинен, элемент 16 распределителя 9 выходит из его корпуса и распределитель соединяет сливную линию 31 с гидроцилиндром 2.
Гидроцилиндры 1 и 2 начинают поворачивать рабочий орган 3 по часовой стрелке
так, что он отслеживает положение двухплешая система занимает новое устойчивое положение, отследив задающий сигнал «g. При уменьшении величины g знаки сигналов «ф и А«Р изменяются на противоположные и все описанное выше повторяется с той разнице, что движение происходит
в обратном направлении, против часовой стрелки.
Настройкой длины винтов 12 и 13 можно регулировать начальное перекрытие распределителей 8 и 9, сводя его практически к нулю.
Работа преобразователя 7, формирующего алгоритм преобразования сигнала рассогласования в управляющей сигнал ф усилителя 4, происходит следующим образом.
Входные сигналы уставки g и обратной связи X подаются на входы первого сумматора 23. Сумматор 23 выделяет сигнал « рассогласования следящего сервопривода. Сигнал « проходит по трем параллельным каналам: пропорциональному, содержащему усилитель 25 с коэффициентом передачи выдающему выходной сигнал , дифференциальному, содержащему диф ференцирующий усилитель 26 с постоянной дифференцирования KD и выдающему выходной сигнал и интегральному, содержащему интегрирующий усилитель 27 с постоянной интегрирования Ки и выдающему выходной сигнал .
Выходные сигналы , , «6„ поступают на входы второго сумма тора 24 и подвергаются нелинейному преобразованию посредством релейного усилителя 21, который формирует непосредственно управляющий сигнал «ф для усилителя 4.
В результате работы релейного усилителя 21 возникает скользящий режим ра- боты при этом параметры переходного процесса (перерегулирования, время переходного процесса при ступенчатом возмущении) не зависят от параметров объекта, а определяются параметрами Кп, Ки, Ко,блока управления. Скользящий режим обеспечивает высокую статическую точность контура гидромотора 10.
Для существования скользящего режима необходимо, чтобы статическая характеристика разомкнутого контура имела однозначность в начале координат. Это достигается тем, что управление гидромотором
AP PJ 1Т,+и
К1ф, |ф| фмах
(4)
K2VlAP-P l-sign|AP-Pc ),
,dt
|Рс| рК1фмах
0 где р. К, К2 - постоянные коэффициенты; Т - постоянная времени обмотки
усилителя 4;
I - ток обмотки усилителя 4; t - время;
5Р& -эквивалентное противодавление нагрузки гидромотора 10. Введем обозначения: б sign (АР - Ре),(5)
рб К1(РК1Ф -Рс)-б(6)
Из системы (4) с учетом соотнощений 20 (5) и (6) после исключения времени t можно получить уравнение фазовых траекторий следящего сервопривода контура гидромотора 10 в дифференциальном виде
,.,
25
de-
рб -
где
скорость изменения рассогласования .
Из соотнощений (6) видно, что при гидромотор 10 разгоняется, а при - 30 тормозится.
Рассматривая движение гидромотора 10 при отработке задающего сигнала (ступенчатой уставки g const) и постоянном управляющем воздействии ф соп51, проинтегрируем уравнение (7) с целью получения уравнения фазовых траекторий разгона и торможения следящего сервопривода контура гидромотора 10 в виде
35
40
-2Тё+2 а arctg-|- + С,, , -2T8-f 2 а arctg + С2, , (8)
из обозначений (5) и (6), С|, С2 - постоянные интегрирования,
зависящие от начальных условий.
Анализ фазовых портретов в соответст10 осуществляется путем задания перепада ствии с соотношениями (8) показывает, что давлений АР (за счет охвата отрицатель- скользящий режим существует, если ной обратной связью по выходному перепаду
давлений усилителя 4). При этом за счет су-(p(i) фтах sign(KnS+KA&), (9) хого трения, определяющего зону нечувствительности, статическая характеристика ра-сп причем Кц и Кj удовлетворяют неравенстзомкнутого контура имеет вид, показанный на фиг. 5, который обеспечивается, если выполняется условие (3), иначе результирующая статическая характеристика останется чисто гистерезисной и скользящий режим не возникнет. Управление ф описывается следующей системой уравнений, (считая, что ф - напряжение на обмотке усилителя 4):
ву (2)
В соотнощений (9) не учтена интегральная составляющая и закона регулирования, которая играет важную роль в повышении 55 помехоустойчивости следящего сервопривода При действии периодических (сетевых) помех за счет вибрационной линеаризации коэффициент усиления релейного усилителя
AP PJ 1Т,+и
К1ф, |ф| фмах
(4)
K2VlAP-P l-sign|AP-Pc ),
,dt
|Рс| рК1фмах
0 где р. К, К2 - постоянные коэффициенты; Т - постоянная времени обмотки
усилителя 4;
I - ток обмотки усилителя 4; t - время;
5Р& -эквивалентное противодавление нагрузки гидромотора 10. Введем обозначения: б sign (АР - Ре),(5)
рб К1(РК1Ф -Рс)-б(6)
Из системы (4) с учетом соотнощений 20 (5) и (6) после исключения времени t можно получить уравнение фазовых траекторий следящего сервопривода контура гидромотора 10 в дифференциальном виде
,.,
25
de-
рб -
где
скорость изменения рассогласования .
Из соотнощений (6) видно, что при гидромотор 10 разгоняется, а при - 0 тормозится.
Рассматривая движение гидромотора 10 при отработке задающего сигнала (ступенчатой уставки g const) и постоянном управляющем воздействии ф соп51, проинтегрируем уравнение (7) с целью получения уравнения фазовых траекторий разгона и торможения следящего сервопривода контура гидромотора 10 в виде
5
40
-2Тё+2 а arctg-|- + С,, , -2T8-f 2 а arctg + С2, , (8)
из обозначений (5) и (6), С|, С2 - постоянные интегрирования,
зависящие от начальных условий.
Анализ фазовых портретов в соответст ствии с соотношениями (8) показывает, что скользящий режим существует, если
(p(i) фтах sign(KnS+KA&), (9) причем Кц и Кj удовлетворяют неравенству (2)
В соотнощений (9) не учтена интегральная составляющая и закона регулирования, которая играет важную роль в повышении помехоустойчивости следящего сервопривода При действии периодических (сетевых) помех за счет вибрационной линеаризации коэффициент усиления релейного усилителя
21 для низких частот сильно уменьшается (в 10-100 раз). При этом в рассогласовании 8 появляется статическая ошибка, устраняемая интегральной составляющей и закона регулирования.
Однако наличие интегральной составляющей приводит к возникновению перерегулирования Лх. При условии, что величина постянной времени Т достаточно мала и скорость W гидромотора 10 следящего сервопривода может меняться скачком от ( + Wo) до (-Wo) уравнения для сигналов Efi, Бя, «, считая начальным моментом начало набора перерегулирования, имеют вид
Кп
а , Vo+ KH55d(At)(10)
k
При этом необходимо учесть, что до момента At работа полного перерегулирования ЛХ и реверсирования регулируемая величина X изменяется с постоянной максимальной скоростью Wo
Х g +АХ g +WoAt(11)
Из соотношения (11) видно, что 8 - ДХ -WoAt.(12)
Решение системы (10) совместно с соотношением (12) дает
Кд.
A,t - 2KH(KA-Vo/Wo)-Kn ..,
FCu
С учетом соотношений (13) и (12) получим соотношение (1). Таким образом, задавая уровень ограничения услителя 27 Vo, можно регулировать (ограничивать) максимальное перерегулирование АХ в допустимых пределах.
Использование предлагаемой электрогидравлической следящей системы позволяет обеспечить высокую точность и быстродействие при расширении областей устойчивости
5
В пространстве параметров системы и повышении ее помехоустойчивости. Все это расширяет функциональные возможности и область применения системы.
5
Формула изобретения
1. Электрогидравлическая следящая система, содержащая два исполнительных гидроцилиндра, соединенных с поворотным рабочим органом, электрогидравлический усилитель, датчик угла поворота, задатчик и сравнивающий преобразователь, подключенный выходом к входу электрогидравлического усилителя, а входами - к задат- чику и датчику угла поворота, отличающаяся тем, что, с целью повышения точности и расширения функциональных возможностей, система снабжена двумя распределителями, корпуса которых закреплены на рабочем органе, и гидромотором управления, вал которого соединен с датчиком угла поворота, закреплен с возможностью поворота на рабочем органе и соединен с помощью дополнительно установленных микрометрических винтов и двуплечего рычага с подвижными элементами распределителей, подключенных к гидроцилиндрам, при этом электрогидравлический усилитель соединен выходами с полостями гидромотора управления.
2. Система по п. 1, отличающаяся тем, что сравнивающий преобразователь выполнен в виде двух сумматоров, релейного усилителя и параллельно включенных пропорционального, дифференцирующего и интегрирующего усилителей, причем входы первого сумматора подключены к задатчику и датчику угла поворота, а выход - к входам параллельно включенных усилителей, выходы которых соединены с входами второго сумматора, а выход последнего через релейный усилитель - с входом электрогидравлического усилителя.
5
0
5
+
фиеЗ
Редактор Ю. Середа Заказ 2294/31
ВНИИПИ Государствеииого комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фаг.г
V/
kV
фигЛ
tfuffS
Составитель С. Рождественский
И. Верес Тираж 639
Корректор М. Шароши Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1987 |
|
SU1530823A1 |
| Электрогидравлический следящий привод | 1983 |
|
SU1105700A1 |
| Устройство для регулирования жесткости прокатной клети | 1977 |
|
SU749479A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1346858A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1399521A2 |
| Следящий привод | 1978 |
|
SU751620A1 |
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1989 |
|
SU1731652A1 |
| Следящая система управления валом главного клапанного распределителя гидравлического ковочного пресса | 1986 |
|
SU1388326A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
Изобретение относится к области гидроавтоматики и м.б.использовано в приводах промышленных роботов и манипуляторов. Изобретение позволяет повысить точность и расширить функциональные возможности системы. На рабочем органе 3 закреплены корпуса распределителей (Р) 8, 9, подключенных к гидроцилиндрам 1, 2. Подвижные подпружиненные элементы 15, 16 Р 8, 9 соединены с валом 11 гидромотора 10 управления с помощью микрометрических винтов 12, 13 и двуплечего рычага 14. Вал 11 соединен с датчиком 5 угла поворота и закреплен на рабочем органе 3 с возможностью поворота. С полостями гидромотора 10 сообщены выходы эл. гидравлического усилителя 4, а его вход сообщен со сравнивающим преобразователем 7. Преобразователь 7 м.б. выполнен в виде двух сумматоров, релейного усилителя и параллельно включенных пропорционального дифференцирующего и интегрирующего усилителей. В результате работы релейного усилителя возникает скользящий режим работы, обеспечивающий высокую статическую точность контура, при этом параметры переходного процесса не зависят от параметров объекта. 1 з.п. ф-лы, 5 ил. а S (рк.:7
| Гидравлический сервомеханизм | 1985 |
|
SU1280206A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
