1
Изобретение относится к области автоматизации технологических процессов, а именно к устройствам для запуска и регулирования режима работы инерционных технологических установок и может быть применено, например, для управления режимом работы кристаллизационных установок при формовании высокопрочных химических волокон.
Известны устройства для запуска и регулирования режима работы инерционных технологических установок, содержащие датчик и задатчик регулируемого параметра, подключенные через датчик рассогласования регулируемого параметра к первому входу переключателя, ко второму входу которого подключен датчик рассогласования лимитирующего параметра, связанный с выходами задатчика максимального значения лимитирующего параметра и датчика лимитирующего параметра, подключенного к выходу датчика регулируемого параметра, а выход переключателя через регулирующий блок соединен с исполнительным блоком.
Однако в таких устройствах качество переходного процесса снижается в момент переключения структуры устройства для запуска инерционных технологических установок, что не позволяет проводить запуск технологических установок по оптимальным разгонным траекториям.
С целью устранения этого недостатка в предлагаемом устройстве дополнительно установлен подключенный к управляющему входу переключателя блок операционного перехода, управляющие входы которого соединены с выходом задатчика максимального значения лимитирующего параметра и выходом датчика рассогласования регулируемого параметра.
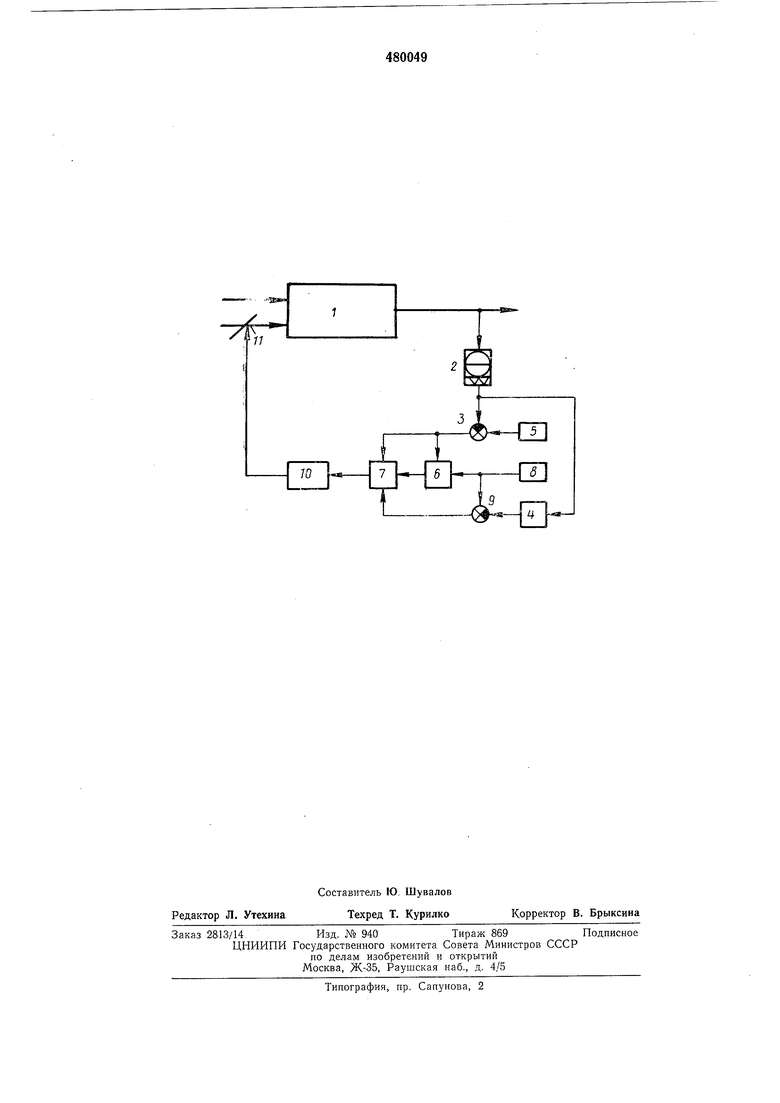
На чертеже представлена схема устройства. На выходе объекта управления 1 установлен датчик регулируемого параметра 2, выход которого подключен к одному из входов датчика рассогласования регулируемого параметра (сумматора) 3, и ко входу датчика текущего значения лимитирующего параметра 4. Ко второму входу сумматора 3 подключен выход задатчика регулируемого параметра 5. Выход сумматора 3 подключен к одному из
управляющих входов блока операционного перехода 6 и входу переключателя 7. Ко второму входу блока операционного перехода 6 подключен выход задатчика максимального значения лимитирующего параметра 8. Выход
блока 6 подключен к управляющему входу переключателя 7. Выход задатчика максимального значения лимитирующего параметра 8 подключен к одному из входов датчика рассогласования лимитирующего параметра
(сумматора) 9, ко второму входу которого
подключен выход датчика текущего значения лимитирующего параметра 4. Выход сумматора 9 подключен ко второму входу переключателя 7, выход которого подключен ко входу регулирующего блока 10, выход подключенного к управляющему входу исполнительного блока 11.
Устройство работает следующим образом.
В начале зануска объекта управления 1 из нерабочего состояния выходной сигнал датчика 2 существенно отличается от заданного значения регулируемого параметра, величина которого задается задатчиком 5, и выходной сигнал сумматора 3 достигает значительной величины. При этом блок операционного перехода 6 устанавливает переключатель 7 в положение, при котором выход сумматора 3 отключен от входа регулирующего блока 10, а выход сумматора 9 подключен ко входу этого блока.
Поскольку до начала запуска на рабочий режим объект автоматического управления 1 находится в каком-либо нерабочем устойчиворл состоянии, величина текущего значения лимитирующего параметра, измеряемая датчиком 4, существенно меньще величины предельно допустимого значения лимитирующего параметра, определяемой выходным сигналом задатчика 8. При этом выходной сигнал сумматора 9, поступающий на вход регулирующего блока 10, сзщественно отличается от нуля. Регулирующий блок 10 стремится компенсировать поступающий на его вход сигнал управления, в результате чего изменяется его выходной сигнал, поступающий на вход исполнительного блока И.
Таким образом, в начальной стадии запуска на рабочий режнм объекта управления 1 управление режимом работы объекта управления 1 осуществляется путем стабилизации регулирующим блоком 10 текущего значения лимитирующего параметра на величине, равной предельно допустимому значению лимитирующего параметра. Запуск объекта управления 1 ведется по оптимальной разгонной траектории.
По мере протекания нереходного процесса в системе автоматического управления, разность текущего значения выходного регулируемого параметра и заданного значения выходного регулируемого параметра, формируемая на выходе сумматора 3, уменьшается.
В момент времени, когда разность текущего и заданного значений регулируемого параметра на выходе сумматора 3 становится равной по величине выходному сигналу задатчика максимального значения лимитирующего параметра 8, блок операционного нерехода 6
ступенчато изменяет свой выходной сигнал, поступающий на управляющий вход переключателя 7. Это приводит к переключению переключателя 7. На вход регулирующего блока
0 подается выходной сигнал сумматора 3.
Конечная стадия запуска объекта автоматического управления на рабочий режим и автоматическая стабилизация текущего значения регулируемого параметра на заданном
значении осуществляются как и в обычной системе автоматического управления с отрицательной обратной связью, с той лищь разницей, что при значительных возмущениях режима работы объекта автоматического управления, возникающих, например, при технологических ощибках, выходной сигнал сумматора 3 становится по величине больще выходного сигнала задатчика 8. В результате этого блок операционного перехода 6 переключает переключатель 1. и система автоматического управления автономно переходит на компенсацию возмущения по безопасной разгонной траектории, исключая создание аварийной ситуации в объекте автоматического
управления 1.
Работа системы автоматического управления в режиме компенсации значительных технологических возмущений аналогична работе системы в начальной стадии запуска объекта
автоматического управления на рабочий режим.
Предмет изобретения
Устройство для управления инерционными технологическими установками, содержащее задатчик и датчик регулируемого параметра, подключенные через датчик рассогласования
регулируемого параметра к первому входу переключателя, ко второму входу которого подключен датчик рассогласования лимитирующего параметра, связанный с выходами задатчика максимального значения лимитирующего параметра и датчика лимитирующего параметра, подсоединенного к выходу датчика регулируемого параметра, а выход переключателя через регулирующий блок соединен с исполнительным блоком, отличающееся
тем, что, с целью новыщения качества переходного процесса при запуске, в нем дополнительно установлен подключенный к управляющему входу переключателя блок операционного перехода, входы которого соединены с выходом датчика рассогласования регулируемого параметра и выходом задатчика максимального значения лимитирующего параметра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления процессом графитации | 1979 |
|
SU1048455A1 |
| Система адаптивного управления параметром технологического процесса | 1988 |
|
SU1620989A1 |
| Устройство для управления процессом графитации | 1976 |
|
SU634078A1 |
| Устройство для управления процессом графитации | 1981 |
|
SU981928A1 |
| Устройство для регулирования состава формовочных растворов | 1973 |
|
SU467951A1 |
| Многоточечный регулятор | 1983 |
|
SU1164675A1 |
| Устройство регулирования технологического процесса | 1976 |
|
SU792214A1 |
| Система управления измельчительным комплексом | 1982 |
|
SU1021472A1 |
| Система регулирования турбины | 1977 |
|
SU661122A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕКАМЕРОЙ | 2001 |
|
RU2200971C2 |