1
Изобретение относится к устройствам для автоматического регулирования состава формовочных и отделочных растворов ви- скозно-кордных и полинозных волокон.
Известен регулятор состава раств эра, содержащий датчик концентрации раствора j, измерительный прибор, задатчик, сумматор, пропорционально-интеграяьно-дифферениирующий (ПИД) регулятор и исполнительный механизм.
Однако такие регуляторы имеют значительное время переходного гроцесса и недопустимую по технологии производства величину перерегулирования в области больших отклонений регулируемого параметра от заданного значения.
В предложенном устройстве в ПИД-ре- гулятор вводится дополнительный блок, изменяющий влияние дифференциальной составляющей закона регулирования на характер переходного процесса при резком рассогласовании текущего и заданнотО значений регулируемой величины, I С этой целью выход дифференцируюшегО
блок ПИД-регулятора связан с одним из
входов масштабирующего преобразователя, на второй вход которого подается сигнал рассогласования текущего и заданного значений регулируемой величины с сумматора, что позволяет изменять передаточный коэффициент масштабирующего преобразователя.
Это noptJUiaeT точность регулировании.
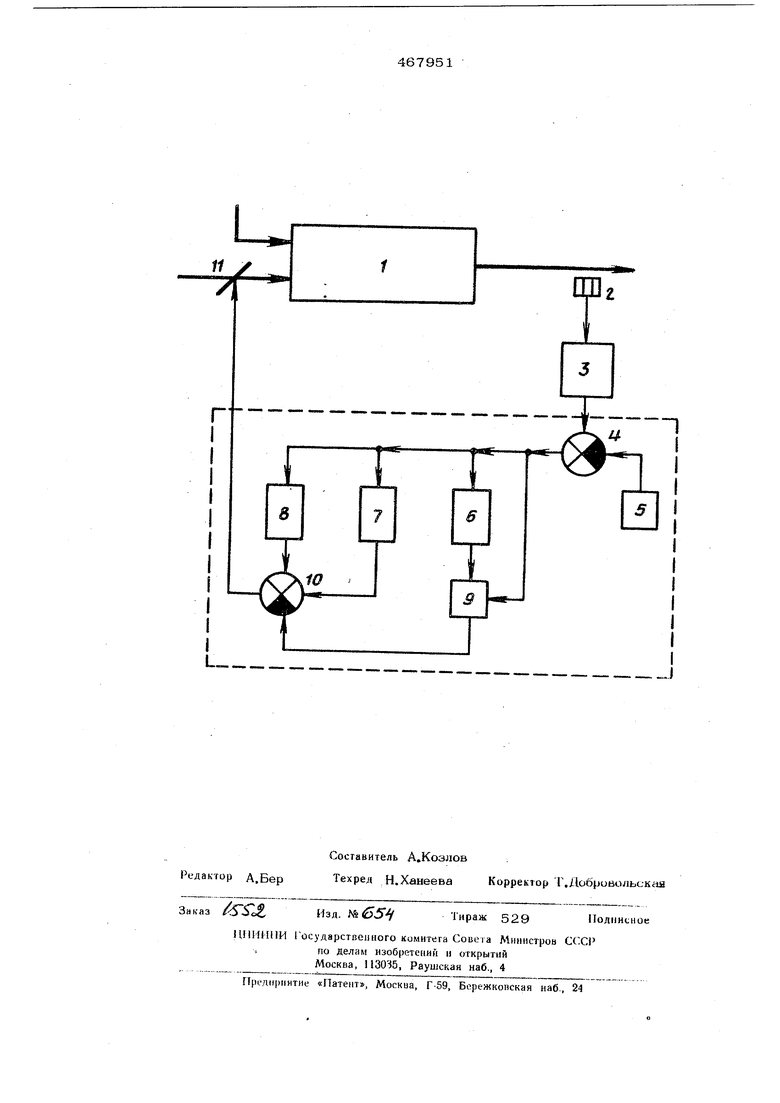
На чертеже изображена блок-схема yciройства.
На выходе объекта автоматического управления 1 установлен датчик контролируемого параметра 2, выход которого подклю-чен к измерительному входу вторичного прибора 3. Выход измерительного прибора 3 подключен к одному из входов сумматора 4, ко второму входу которогО подключена линия выгодного сигнала задатчика контролируемого /параметра 5. Выход сумматора 4 подключен ко входам дифференцирующего устройства 6, интегратора 7, блока пропорциональности 8 и управляк щему входу масштабирующего .преобраас -. .вателя 9. Выходы блока пропорционально.сти 8, интегратора 7 и Macii ra6n)yioii(eio
3
преобразователя 9 подключены ко входам сумматора Ю, которого соединен с : управляющим входом исполнительного меха-,
низма 11. ,..г-
Работает устройство следующим образом. Если возмущения в объекте автоматического управления 1 незначительны по сво ей величине и величина контролируемого па раметра примерно соотвэтствует заданному значению, то передаточньхй коэффициент мас щтабирующего преобразователя 9 в этом сл ,чае также изменяется в очень узком диапазоне, а работа регулирующего .устройства в целом примерно соответствует работе обычного ПИД-регулятора в режиме опти- мальных настроек. Если на вход системы автоматического управления поступило значительное возмущение (например вследствие выхода из строя отжимных устройств на одном из прядильных комбайнов, пластификационная ванна прорвалась во второй отмьюочный раствор), то его необходимо ликвидировать за минимальный промежуток времени. Реакция технологического раствора на выходе объекта 1 управления меняется со слабо щелочной на кислую, что приводит к значительному изменению выходного сигнала датчика контролируемого параметра 2 и вторичного измерительного прибора 3. На выходе сумматора 4 появляется разность сигналов вторичного измерительного при,бора 3 и задатчика 5, значительно отличающаяся от нуля. Передаточный коэффициент, масщтабирующего преобразователя 9 при этом значительно уменьшается , практически исключая влияние дифференциальной состав1шющей на характер переходного процесса на данном участке. Регулятор отрабатывает пропорционально-интегральный закон регулирования (причем первоначаль-
ный скачок пропорциональной составляющей сглаживается инерционностью объекта ре.гулирования 1) с максимально допустимыми ускорениями, i
По мере роста абсолютной величины контролируемого параметра; уменьшения сигна.ла рассогласования сумматора 4 и устранения аварийной ситуации на объекте авт.о атического регулирования, состоящей ;в выпуске кислого корда при наличии кислой реакции отмьгоочного раствора, передаточный коэффициент масштабирующего преобразователя 9 растет . Это увеличивает действие отрицательной обратной связи по производной по .мере приближения контро- i лируемого параметра к. заданному значению и при соответствующих коэффициентах про- ;порциональности приводит к монотонному I „переходному процессу. Предмет изобретения Устройство для регулирования состава ; формовочных растворов, содержащее датчик 1 концентрации, подключенный ко входу из- i мерительного прибора, выход которого соединен с сумматором, второй вход которого электрически связан с задатчиком, а выход сумматора подключен к пропорционально-интегрально дифференцирующему регулятору, соединенному с исполнительным механизмом, отличающееся тем, i что, с целью повышения точности регули- рования, пропорционально-интегрально- дифференцирующий регулятор снабжен масштабирующим преобразователем, один из входов которого соединен с выходом дифференцирующего блока регулятора, а второй вход - с выходом сумматора.
U
11
6
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА | 2014 |
|
RU2573731C2 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР | 2017 |
|
RU2648516C1 |
| Устройство для регулирования технологических параметров по заданной программе | 1983 |
|
SU1136121A1 |
| Устройство для регулирования силовых параметров и рабочей подачи процесса резания | 1985 |
|
SU1270744A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Устройство автоматического регулирования процесса сушки материала | 1984 |
|
SU1313923A1 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2571371C2 |
| Устройство для регулирования температуры | 1981 |
|
SU999029A1 |
| СУПЕРВИЗОРНЫЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2157558C1 |