(54) УСТРОЙСТВО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО Изобретение относится к области автоматизации технологических процессов, а именно к устройствам для регулирования режима работы технологических установок по экстремальному значению контро лируемого параметра, и может быть использовано в металлургической, химической и других отраслях промышленности. Известно устройство регулирования тех нологического процесса, содержащее два датчика регулируемого параметра, два дат чика, два сумматора, блок операционного перехода, переключатель, регулирукмций блок и исполнительный блок Til. С целью повышения качества переходного процесса при запуске в этом устройстве происходит сравнение сигналов разности текущего значения выходного регулируемого параметра с заданным значением. Известно и другое устройство регулирования технологического процесса, содер жащее датчик экстремума, переключательное устройство, два запоминающих устрой
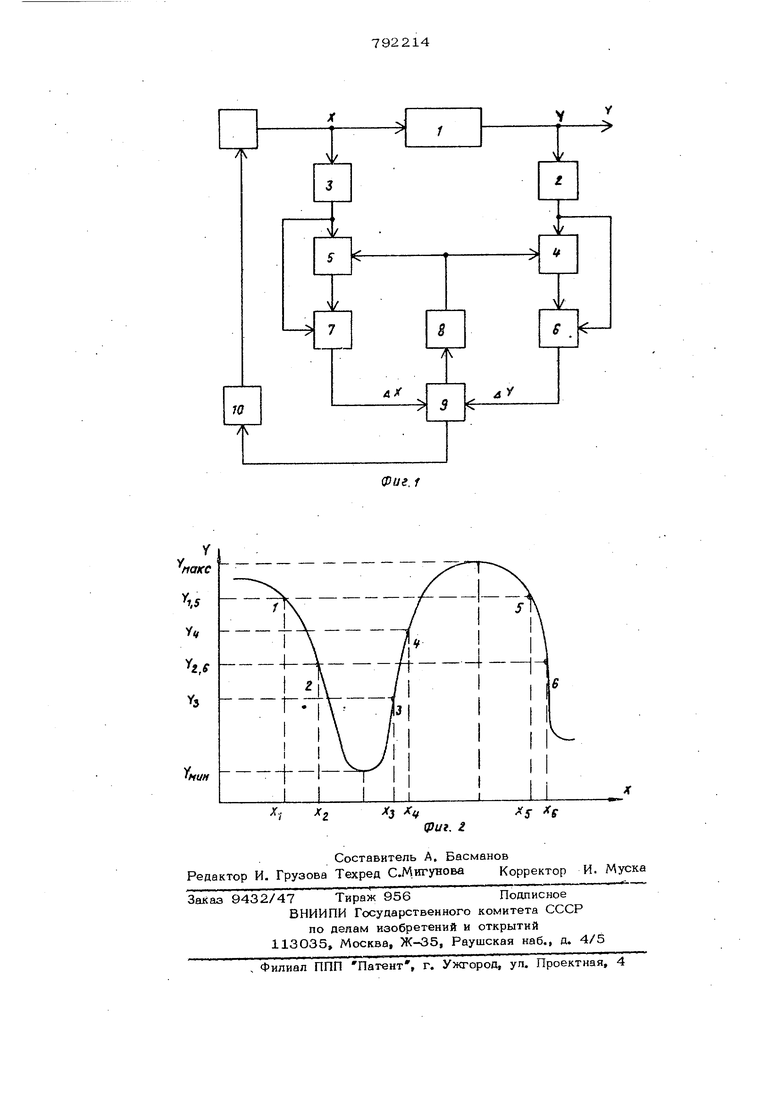
ПРОЦЕССА ства, сравнивающий элемент, реверсивный элемент, исполнительный элемент и командный генератора . Цикл работы sfo1Ч устройства проходит за четыре гак- та работы командного генератора. Величины регугафуемого параметра двух последовательных состояний объекта регудирования записываются в запомкнакядие устройства, и после их сравнения определяются величина и знак напряжения, которое должно воздействовать на объект. После приближения к экстрему у в устройстве устанавливается процесс, при котором он будет совершать колебания экстремального состояния. Недостатком его является невысокое быстродействие из-за даличия запаздывания реакции выходного снгвбша объекта регулирования на входное возде11ствие Цель изобретения - повыщение быстродействия регулирования технологического процесса. Поставленная цель достигается тем, что в устройстве регулирования технологического процесса, содержащем датчик регулируемого параметра, датчик регулирующего параметра, два блока памяти, два сумматора, блок совпадения, блок запуска и регулирующий блок, выход датчика регулируемого параметра подключен к первому блоку памяти и к первому входу первого сумматора, второй вход которого связан с выходом Первого блока памяти, выход датчика регулирующего параметрак второму блоку памяти и к первому входу второго сумматора, второй вход которого связан с выходом второго блока памяти, управляющие входы блоков памяти подсоединены к выходу блока запуска,. а выходы сумматоров - к блоку совпадения, выхоДоТ которого подключены соответствен но к блоку запуска и регулируют ему блоку связанному со входом датчика регулирующего .параметра. На фиг. 1 представлена блок-схема устройства; на фиг. 2 - зависимость регу лируемого параметра от регулирующего. На выходе и входе объекта 1 регулиро вания соответственно установлены датчик 2 регулируемого параметра и датчик 3 регуг.ирующего параметра. Выходы датчиков подключены к двум блокам 4 и 5 памяти и Двум сумматорам 6 и 7. Управля ацие входы блоков 4 и 5 памяти,подсоединеньг к блоку 8 запуска, вход которого подключен к выходу блока 9 совпадешш. БЛОК 9 совпадения через регулирующий блок 1О подключен к объекту 1 регулирования. Устройство работает следующим образом. Датчик 2 регулируемого параметра измеряет текущее значение регулируемого параметра У,а датчик 3 регулирующего параметра - значение регулирующего параметра Х Сигналы У и X поступают на вход блоков 4 и 5 памяти и сумматоров б и7 соответственно. Сумматоры 6 и 7 осуществляют сравнега е текущего значения сигналов У и X с ранее запомненными сигналами в блоках 4 и 5 памяти. Выходные сигналы сумматоров 6 и 7 соответственно .дУ и АХ поступают на входы блока 9 совпадения, осуществляющего операцию совпадения полярности сиг налив ли и ДХ и выдачу сигнала,пропор ционального значению ДУ в цепь блока 8 запуска и регулирующего блока 1О, Минимальное значение У поддерживае ся уменьшением регулирующего воздействия X, если полярность дУ и ЛХ совпад ет, или увеличением,, если не совпадает. Максимальное значение У поддерживает 79 г я увеличением X, если полярность А У Д X совпадает, или уменьшением, если е совпадает. Управляющий сигнал на выходе блока запуска появляется через время, опрееляемое формулой 0 S - некоторая постоянная величина, определяемая условиями технологического процесса. Согласно этой формуле уменьшение по модулю величины Д У вызывает увеличение задержки появления сигнала на выходе блока запуска, т.е. при приближении к экстремуму увеличивается время поступления сигналов на регулирование X - В результате этого увеличивается быстродействие, точность и плавность подхода к точке экстремума с минимальным количеством изменений режима работы исполнительного блока, что повышает надежность работы всей системы и уменьшает энергозатраты. Формула изобретен и. я Устройство регулирования технологического процесса, содержащее датчик регулируемого параметра, датчик регулирующего параметра, два блока памяти, два сумматора, блок совпадения, блок запуска и регулирующий блок, отличающееся тем, что, с целью повышения процесса быстродействия регулировр шя технологического процесса, выход датчика регулируемого параметра подключен к первому блоку памяти и к первому входу первого сумматора, второй вход которого связан с выходом первого блока памяти, выход датчика регулирующего параметра подключен к второму блоку памяти и к первому входу второго сумматора, второй вход которого связан с выходом второго блока памяти, управляющие входы блоков памяти подсоединены к выходу блока запуска, а выходы сумматоров - к блоку совпадения, выходы которого подключены соответственно к блоку запуска и регулирующему блоку, связанному со входом датчика регулирукжцего параметра. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 480049, кл. GT 05 В 11/ОО, 1973. 2.Чинаев П. И. Самонастраивакщиеся системы. Киев, Наукова думка , 1969, с. 16 (прототип).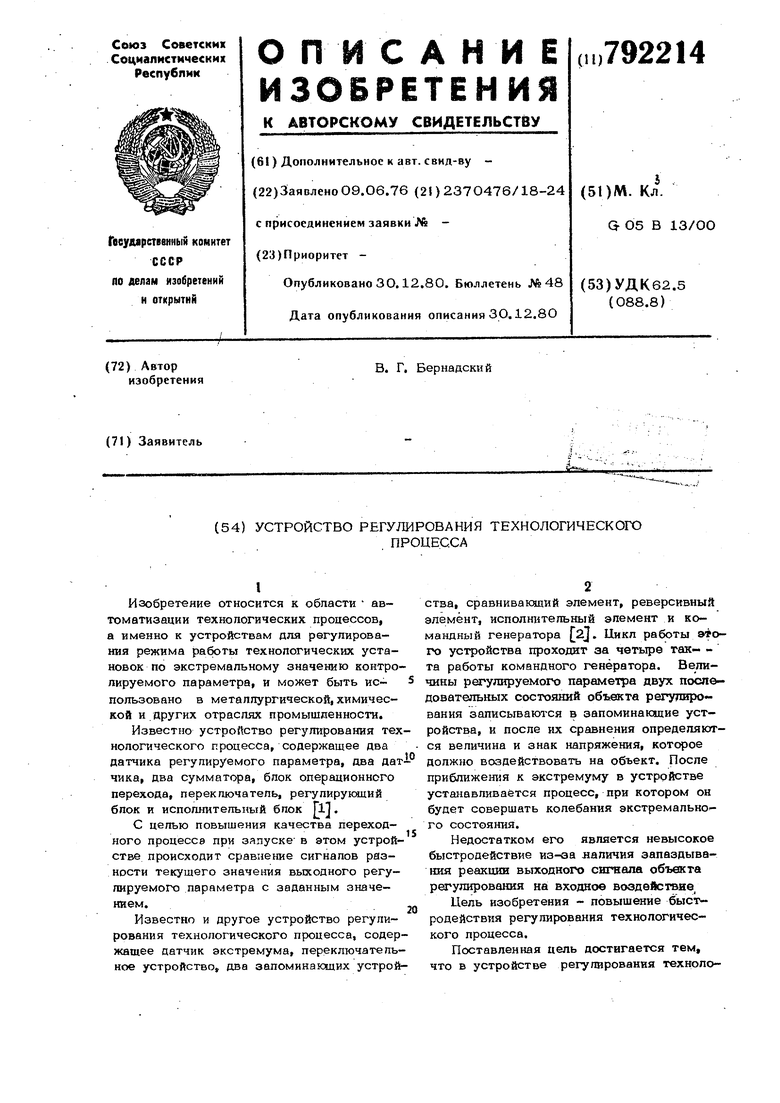
| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирования | 1980 |
|
SU885972A1 |
| Система автоматической оптимизации | 1986 |
|
SU1310773A1 |
| Система экстремального регулирования амплитуды вибраций на металлорежущем станке с выдвижным шпинделем | 1985 |
|
SU1352453A1 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1260916A1 |
| Устройство для экстремального регулирования | 1979 |
|
SU860000A1 |
| Устройство для определения состояния технического объекта | 1988 |
|
SU1557546A1 |
| Цифровой регулятор | 1978 |
|
SU911458A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Способ определения суммарных потерь мощности в регулируемой высоковольтной линии электропередачи | 1986 |
|
SU1422169A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПО ИНТЕГРАЛУ КОМПЕНСИРУЮЩЕГО ВОЗДЕЙСТВИЯ | 2003 |
|
RU2285281C2 |