1
Изобретение относится к гидравличесКИМ приводам и предназначено для управления различными типами манипуляторов и в частном случае для управлений про
мышпенными роботами.g
Известен электрогидравлический следящий привод, предназначенный для управления промышленным роботом и содержащий золотниковую пару, выход которой подключен к полостям силового цилинщза, шток IQ которого кинематически связан с поворотной втулкой золотниковой пары, блок задания программы, подключенный к элементу сравнения, электродвигатель и червяч ную пару.15
Цель изобретения - улучшение динамических характеристик привода и устранение колебательного процесса при остановке исполнительного органа.
Достигается это благодаря тому, что 20 электрогидравлический следящий привод одержит датчик обратной связи, расположеный на одном валу с плунжером золотниковой пары и подключенный к элементу сравнения, выход которого соединен с управляю- 25
щим входом электродвигателя, связанного через выходной вал и червяч.ную пару с плунжером золотниковой пары.
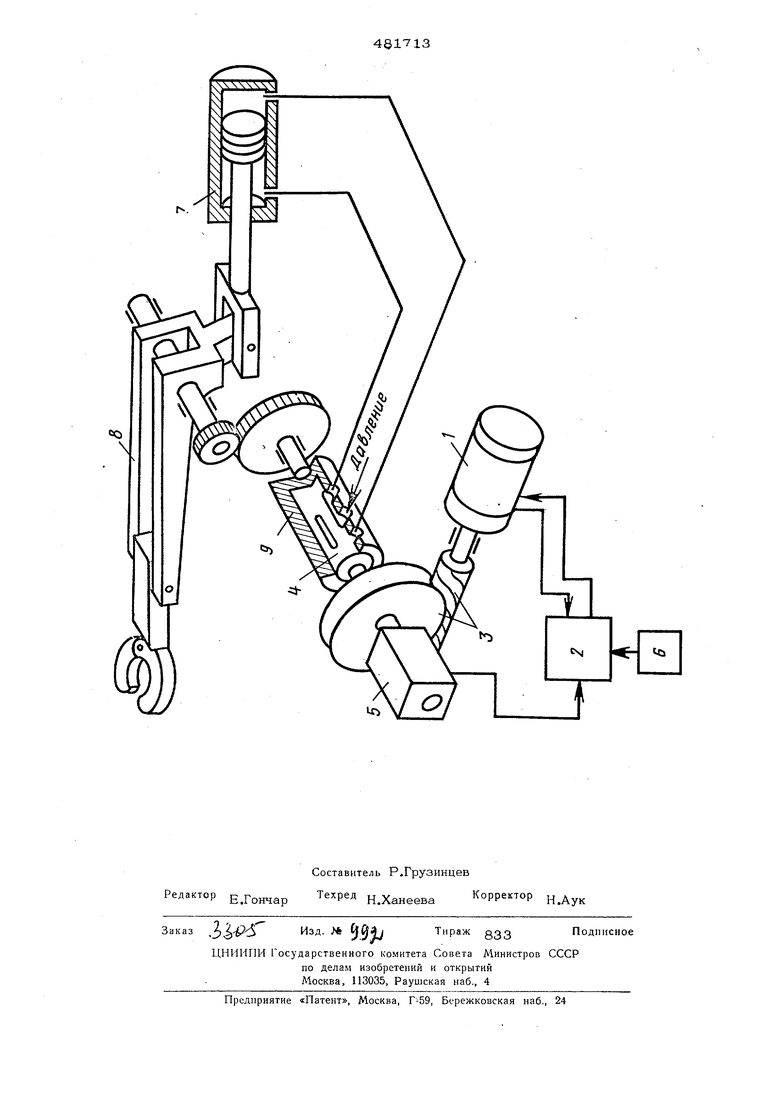
. На чертеже схематически представлено предлагаемое устройство.
Электрогидравлический следящий привод содержит электродвигатель 1, элемен 2, червячную пару 3, плунжер 4 золотниковой пары, датчик 5 обратной связи, блок 6 задания программы, силовой цидиндр 7, исполнительный орган 8 и поворотную втулку 9 золотниковой пары.
Электродвигатель 1, получив команду от блока 6 задания программ,ы через элемент сравнения 2, начинает при помощи червячной пары 3 поворачивать плунжер 4 золотниковой пары. Одновременно вращается и датчик 5 обратной связи, вырабатывая текущий электрический сигнал, который поступает в элемент сравнения 2. Текущий электрический сигнал сравнивается с сигналом, выданным блоком 6 задания программы. Когда сигналы сравняются, произойдет остановка электродвигателя 1, а следовательно, и плунжера 4
золотниковой пары. Как только плунжер золотниковой пары начнет поворачиваться, открываются проходные отверстия золотника и масло устремляется в сиповой цилиндр 7. Начинает движение испо;шительный орган 8, а вместе с ним кинема-тически связанная с ним поворотная, втулка 9 золотниковой пары. Движение будет продолжаться до тех пор, пока поворотная втулка 9 золотниковой пары не догонит плунжер 4 золотниковой пары и не закроет проходные отверстия. При таком построении схемы колебательный процесс, который может возникнуть в период остановки электродвигателя при совпадении сигналов датчика обратной связи и блока задания программы, не будет накладываться на исполнительный орган, так как, во-лервых, зона его действия распространяется лишь от электродвигателя до золотника, и, во-вторых, по времени он будет иметь место раньше, чем исполнительный орган завершит свое движение.
Предмет изобретения
Электрогидравлический следящий привод,
содержащий золотниковую пару, выход которой подключен к полостям силового цилиндра, шток которого кинематически связан с поворотной втулкой золотниковой пары,
блок задания программы, подключенный к элементу сравнения, электродвигатель и червячную пару, отличающийся тем, что, с целью улучшения динамических характеристик привода, он содержит датчик
обратной связи, расположенный на одном валу с плунжером золотниковой пары и подключенный к элементу сравнения, выход которого соединен с управл5пощим входом электродвигателя, связанного через выходной вал и червячную пару с плунжером золотниковой пары.
to
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позицирования гидропривода,например,промышленного робота | 1974 |
|
SU482719A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| ГИДРАВЛИЧЕСКАЯ ПОЗИЦИОННАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ | 1973 |
|
SU393486A1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305210C2 |
| ДВУХРЕЖИМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С НЕРЕВЕРСИВНЫМ НАСОСОМ | 2011 |
|
RU2484314C2 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305211C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМе-с?;сою:^;^*^- • bATEM^a^aiiH^i^- Щ ""^ &и&лиот^и.л^^ | 1973 |
|
SU374161A1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА И КЛАПАНОМ ДЕМПФИРОВАНИЯ | 2011 |
|
RU2483978C2 |