1
Изобретение относится к быстрбдейстйуЮ щим следящим системам с преселективным дистанционным управлением для станков и машин деревообрабатывающей промышленности, например для перемещения подвижных пил обрезных станков.
В известных электрогидравлических следящих приводах используется задающее устройство на сельсинах и электродвигателе, исполнительный гидроцилиндр, реверсивный распределитель.
В этих системах для достижения требуемой точности установки рабочего органа при срабатывании необходимо вводить торможение перед подходом рабочего органа к заданному положению со ступенчатым уменьщением скорости в lO-f-20 раз на участке пути 10 мм.
Цель изобретения - обеспечить быстрые перемещения рабочего органа гидроцилиндра с точной установкой в заданных положениях.
Достигается это тем, что электродвигатель соединен через червячную пару с золотником реверсивного распределителя и через цилиндрическую зубчатую пару с сельсином-приемником, а рабочий орган гидроцилиндра через реечную пару соединен с отслеживающей втулкой распределителя.
На чертеже изображен предлагаемый привод с дистанционным управлением.
Привод состоит из двух независимых
туров: упрайляюЩего-электромеханического и исполн-ительного-гидромеханического.
Управляющий контур содержит задающее устройство в виде сельсина-датчика, электрическую обратную связь в виде сельсина-приемника, электрическое управляющее устройство в виде усилителя и электрическое исполнительное устройство в виде электродвигателя. Исполнительный контур состоит из гидравлического управляющего устройства в виде реверсивного распределителя пропорционального действия с механической обратной связью и гидравлического исполнительного устройства в виде гидроцилиндра.
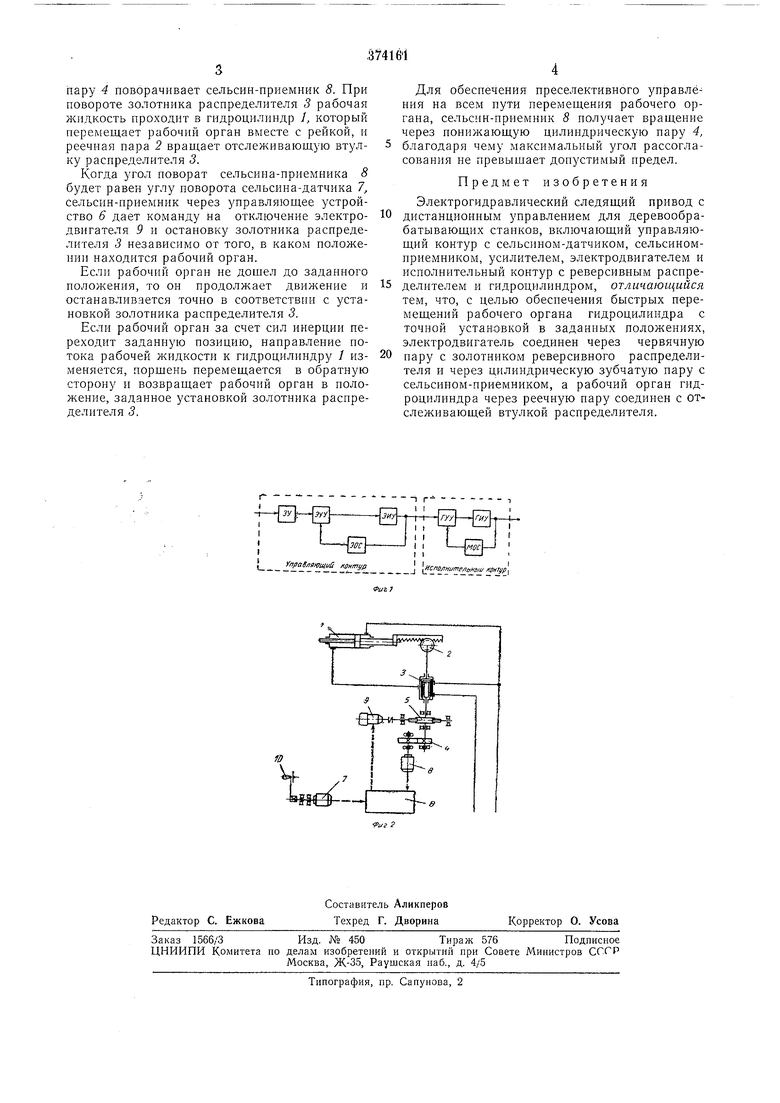
Привод состоит из гидроцилиндра /, реечной пары 2 обратной связи, следящего реверсивного распределителя 3, цилиндрической зубчатой пары 4, червячной пары 5, управляющего устройства б, сельсииа-датчика 7, сельсина-приемника 8, электродвигателя 9 и задающей рукоятки 10.
При повороте рукоятки W в одно из положений, вместе с ней поворачивается сельсин-датчик 7, возникает сигнал рассогласования, который через управляющее устройство 6 дает команду на вращение электродвигателя 9 в ту или другую сторону. Электродвигатель 9 через червячную пару 5 вращает золотник следящего реверсивного распределителя 3 и одповременно через цилиндрическую зубчатую
пару 4 поворачивает сельсип-приемник 8. При повороте золотника распределителя 3 рабочая жидкость проходит в гидроцилиидр 1, который перемещает рабочий орган вместе с рейкой, и реечпая пара 2 вращает отслеживающую втулку распределителя 3.
Когда угол поворат сельсина-приемника 8 будет равен углу иоворота сельсина-датчика 7, сельсин-приемник через управляющее устройство 6 дает команду на отключение электродвигателя 9 и остановку золотника распределителя 3 независимо от того, в каком положении находится рабочий орган.
Если рабочий орган не дощел до заданного положения, то он иродолжает движение и останавливается точно в соответствии с установкой золотника распределителя 3.
Если рабочий орган за счет сил инерции переходит заданную позицию, направление потока рабочей жидкости к гидроцилиндру / изменяется, порщень перемещается в обратную сторону и возвращает рабочий орган в положение, заданное установкой золотника распределителя 3.
Для обесиечения преселективного управления на всем пути перемещения рабочего органа, сельсин-приемник 8 получает вращение через понижающую цилиндрическую пару 4, благодаря чему максимальный угол рассогласования не превыщает допустимый предел.
Предмет изобретения
Электрогидравлический следящий привод с дистанционным управлением для деревообрабатывающих станков, включающий управляющий контур с сельсином-датчиком, сельсиномприемником, усилителем, электродвигателем и исполнительный контур с реверсивным распределителем и гидродилиндром, отличающийся тем, что, с целью обеспечения быстрых перемещений рабочего органа гидроцилиндра с точной установкой в заданных положениях, электродвигатель соединен через червячную пару с золотником реверсивного распределителя и через цилиндрическую зубчатую пару с сельсином-приемником, а рабочий орган гидроцилиндра через реечную пару соединен с отслеживающей втулкой распределителя.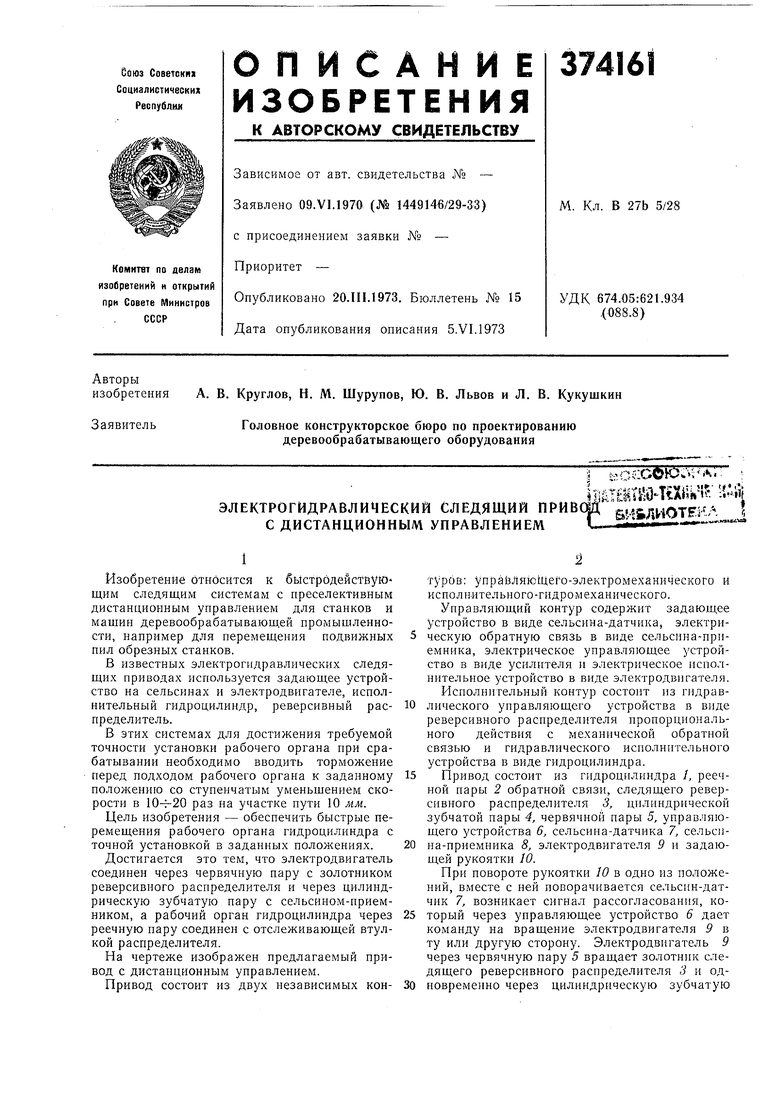
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1971 |
|
SU307897A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1966 |
|
SU185484A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1969 |
|
SU247753A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДВУХСКОРОСТНОЙ СЛЕДЯЩИЙ ПРИВОД | 1969 |
|
SU233870A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| Гидропривод гидротехнического затвора | 1984 |
|
SU1236208A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВО,всссогознАЯр,- '-гч'-:-.'•'';[.'?|'.тгн»о. ..! ;; 1\^ )i..'Uiil iLunAji . Е'^^БЛИОТЕКА | 1971 |
|
SU309813A1 |
| РЕВЕРСИВНЫЙ СЛЕДЯЩИЙ ПРИВОД | 1972 |
|
SU332440A1 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |
| Устройство для управления положением рабочих органов | 1977 |
|
SU677911A1 |
